-

Setup
-
Plans

Inspiration
Intuitive ways to handle precision movements wirelessly.
What it does
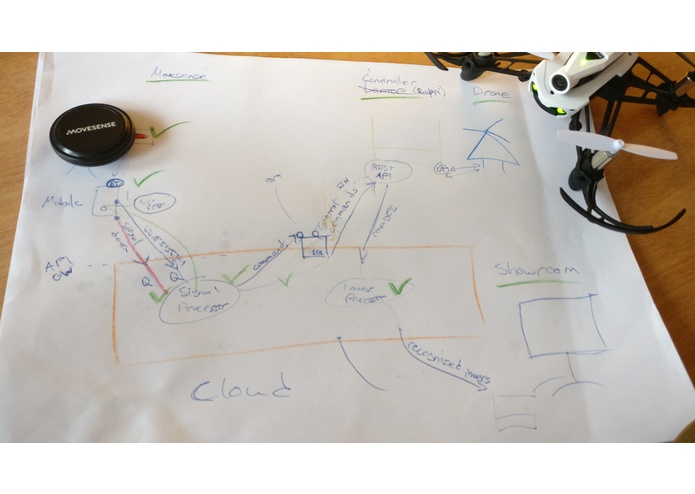
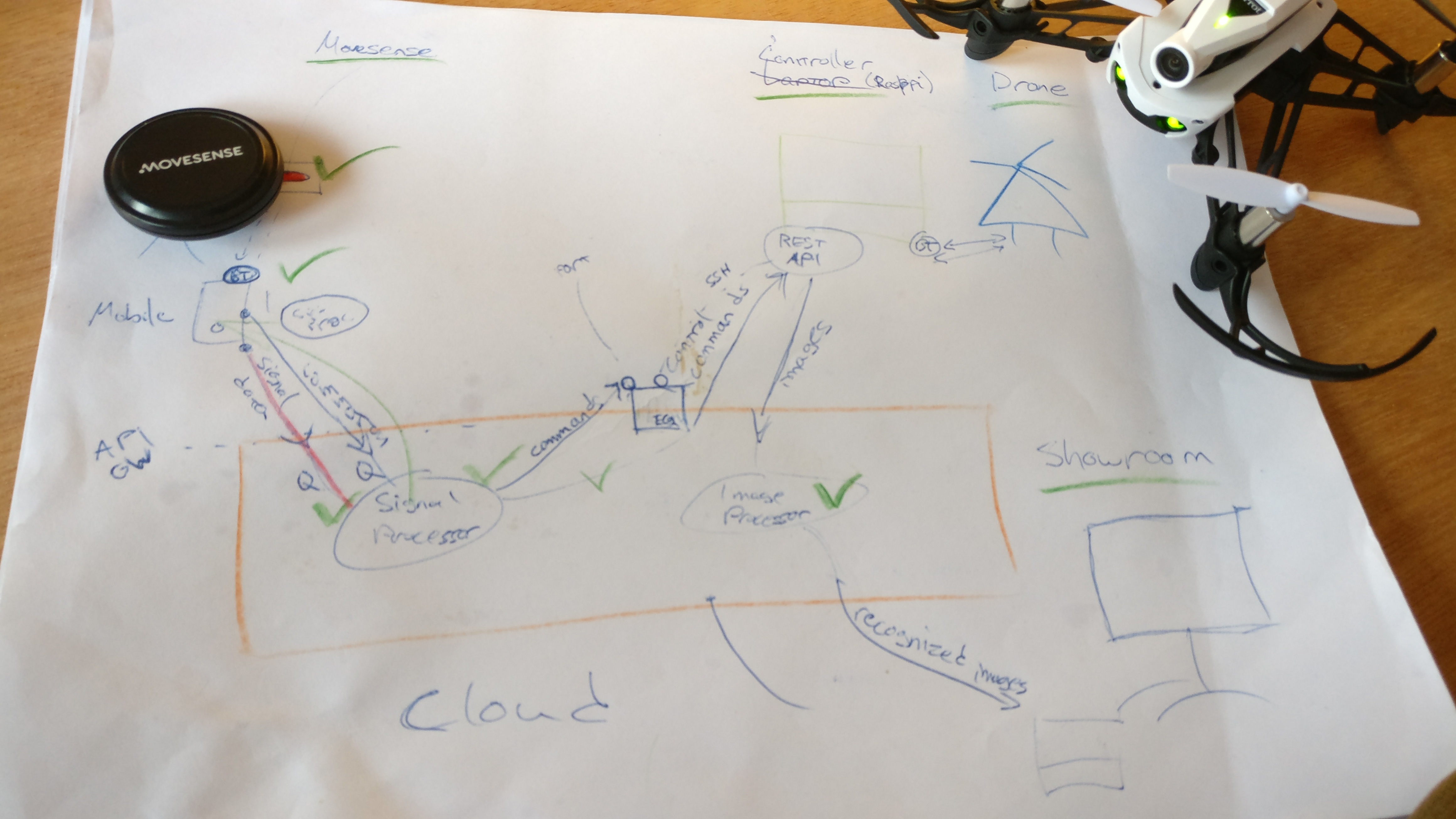
Send xyz-data from the Suunto Movesense through a gateway to AWS, and from AWS to gateway for the quadrocopter(s).
How we built it
We tested different technologies to find the best ones. Android Movesense gateway, AWS for public access REST API, Raspberry PI as an Bluetooth LE gateway for the quadrocopter, and Javascript (node.js) Bluetooth API for controlling the quadrocopter.
Challenges we ran into
Main problems were the connectivity issues, in a space with huge amount of Bluetooth radios, the connections are not reliable. Also the node.js Bluetooth quadrocopter API did not have camera streaming possibility because Bluetooth does not have the bandwidth.
One of our development machines encountered some water based issues (mainly because of spilled water) and we almost lost our Android application.
Accomplishments that we're proud of
Basic idea of the control and replay flight plans based on Movesense.
What we learned
Don't spill water on laptops when in hurry to develop new features. Bluetooth connections are not reliable for near real time control.
What's next for Movesense Pilot
We should add more reliable way to detect up/down movement.
Built With
- amazon-web-services
- android
- java
- node.js
- parrot-quadcopters
- python
- serverless
- suunto-movesense



Log in or sign up for Devpost to join the conversation.