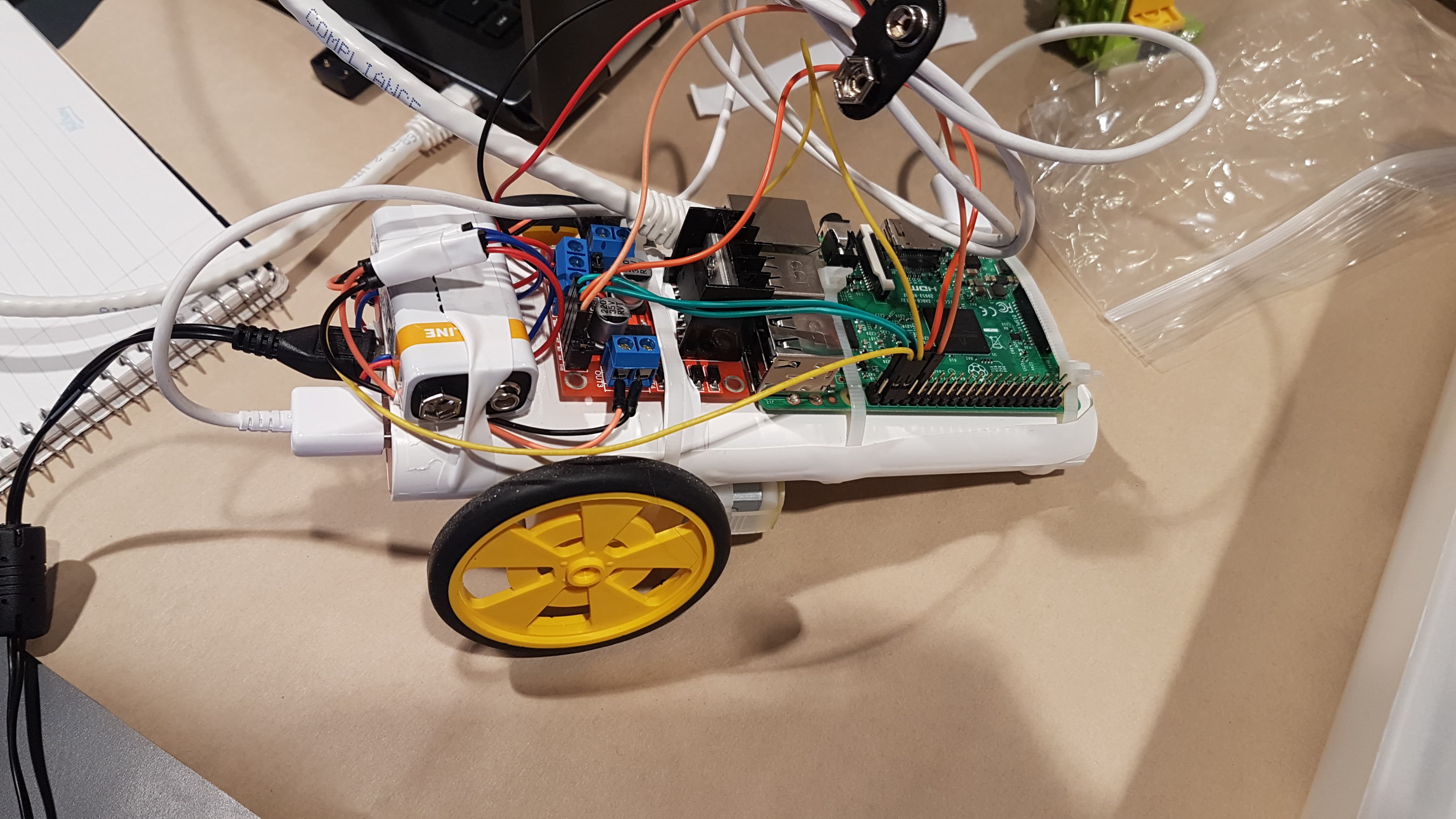
used leap motion to detect hand gestures, relayed them back to raspberry pi robot to control robot with hands
TABLE 42
robot system using leap motion
used leap motion to detect hand gestures, relayed them back to raspberry pi robot to control robot with hands
TABLE 42

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.