-
-
-
-
Rescue Detection Robot
-

Inspiration
Natural disasters and emergency situations often require rapid response and efficient search-and-rescue operations. However, human rescuers face extreme risks in hazardous environments. We wanted to create an autonomous robot that can navigate disaster zones, detect survivors, and send an SOS alert to save lives.
What it does
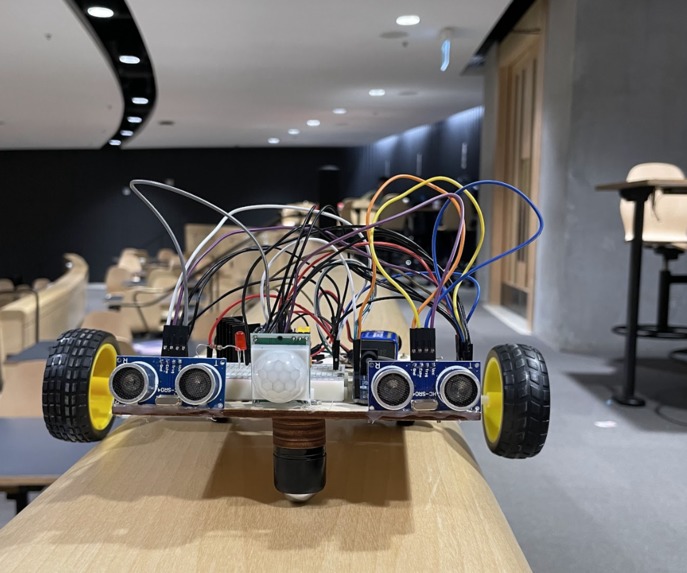
Roams autonomously while avoiding obstacles. Periodically spins in place to detect people nearby.(Every 20seconds) Uses computer vision (YOLO) and PIR sensor(detecting human motion) to identify survivor. if a person is detected, it sends an SOS signal
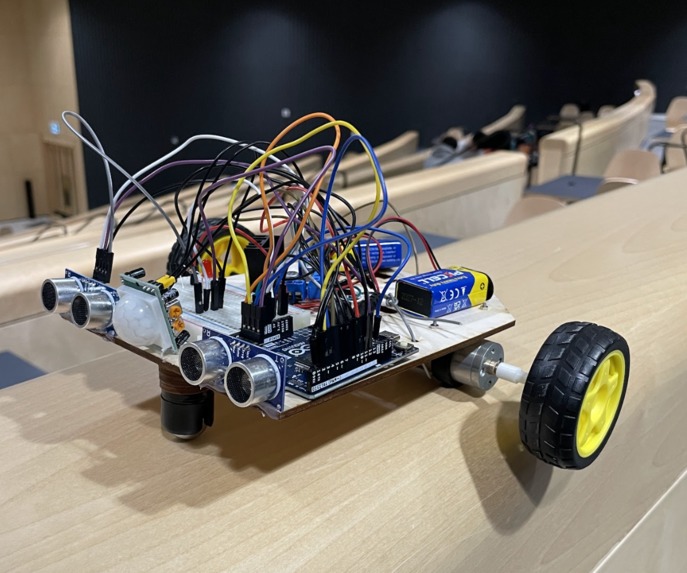
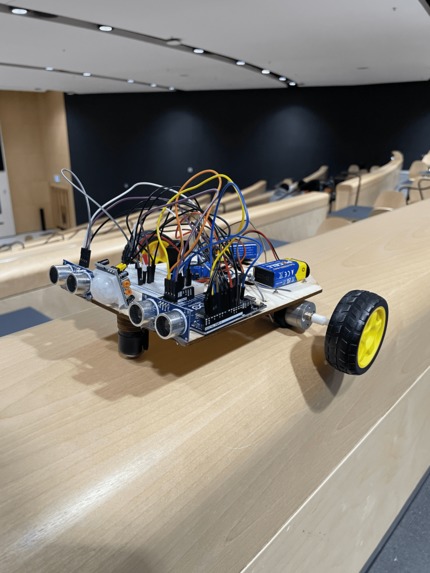
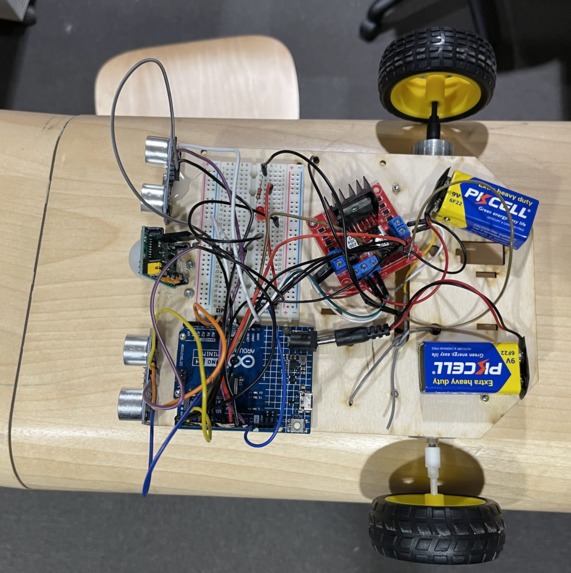
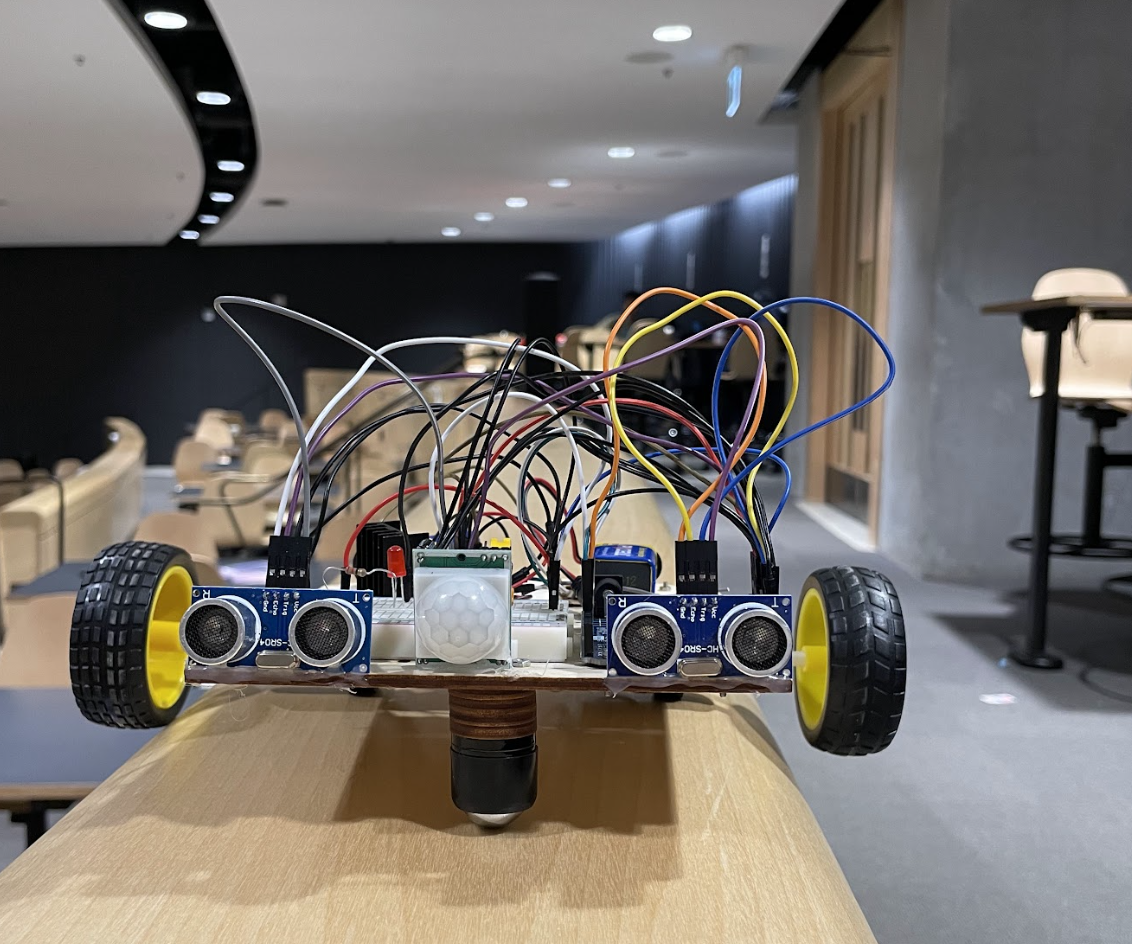
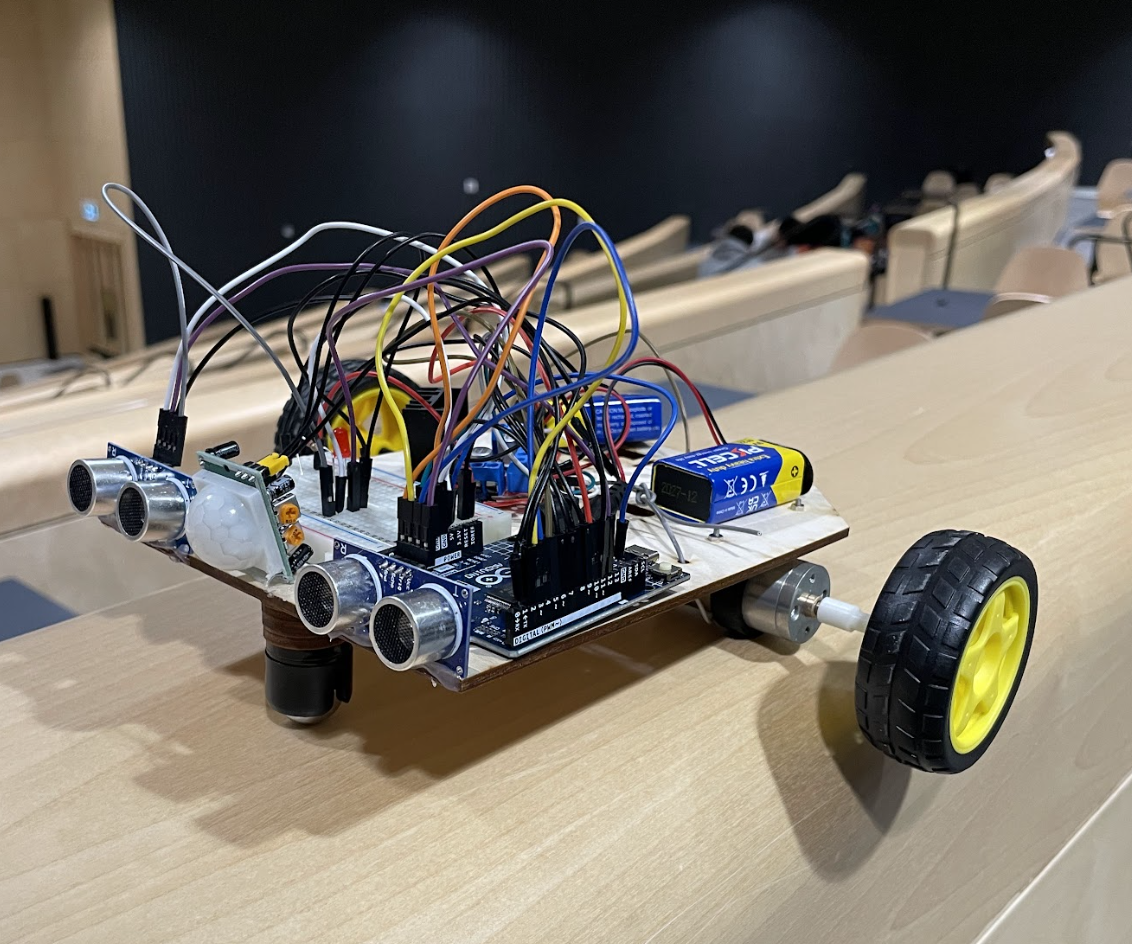
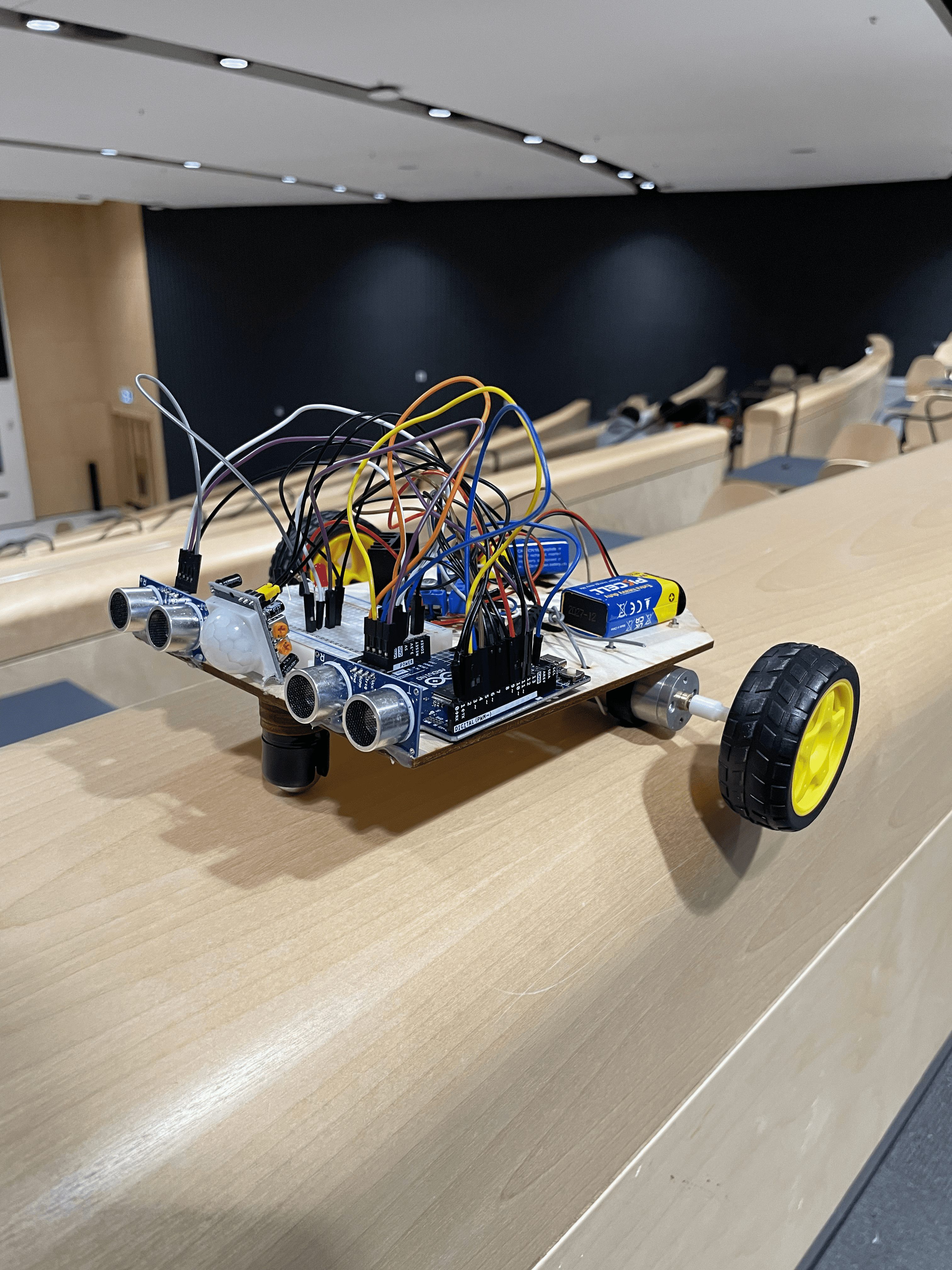
How we built it
Arduino + L298N Motor Driver for movement. Ultrasonic sensors for obstacle avoidance. YOLO computer vision to detect survivors PIR sensor to detect humans Python + OpenCV for real-time object detection (YOLOv8) Machine learning models to identify and track humans.
Challenges we ran into
Throughout the development of the Autonomous SOS Rescue Robot, we encountered several technical challenges that required us to rethink our approach. Some of the most significant issues included wireless communication difficulties and power management problems.
- Bluetooth Communication with HC-06 Module One of our initial goals was to use Bluetooth (HC-06) to establish a wireless connection between Python (on a phone or computer) and the Arduino board. The idea was to send detection signals from the Python script to the Arduino over Bluetooth, allowing the robot to react in real time.
However, we faced multiple challenges:
Unreliable Data Transmission – The Bluetooth module struggled with consistent communication, causing delays and dropped signals. Limited Range – The HC-06 has a relatively short range, which limited the robot's operational distance in a real-world rescue scenario. Pairing & Compatibility Issues – Establishing a stable serial connection between Python and HC-06 proved problematic, often requiring manual resets. Due to these limitations, we ultimately decided to explore alternative communication methods, such as Wi-Fi or RF modules, which provided more stable and reliable connectivity for transmitting detection signals and control commands.
- Power Drain from Motors Another major challenge was power consumption, particularly when driving the DC motors using the L298N motor driver. Initially, we used a battery pack to power the entire system, but we quickly realized:
The motors drained the battery almost instantly, significantly reducing the robot’s operational time. The power supply was not sufficient to sustain the Arduino, sensors, and motors simultaneously, leading to frequent resets. To mitigate this, we explored higher-capacity battery options and considered separating the power source for the motors and the control system to prevent sudden shutdowns.
- Slow Motor Movement & Lack of Torque In early tests, the robot’s movement was too slow, and it struggled to navigate through rough terrain. This was due to:
Insufficient voltage and current reaching the motors, limiting their output. The L298N motor driver’s inefficiency, which caused excessive heat loss and further reduced power to the motors. To resolve this, we tested different motor drivers (such as the TB6612FNG) that offered better power efficiency and delivered higher torque for smoother and more reliable movement.
Accomplishments that we're proud of
Despite the challenges we faced, our Autonomous SOS Rescue Robot achieved several important milestones that demonstrate its potential as a real-world search-and-rescue tool. These accomplishments highlight the technical progress, problem-solving, and innovation that went into building the system.
- Successfully Implemented AI-Based Human Detection We integrated YOLO (You Only Look Once) object detection with OpenCV to recognize humans in real-time. The robot can now autonomously detect a person and trigger an SOS signal, proving its effectiveness in a rescue scenario.
- Built a Fully Autonomous Navigation System The robot can move independently, avoiding obstacles using ultrasonic sensors. We successfully programmed it to roam freely, stop, and spin to search for people before continuing its patrol. This enables the robot to cover more ground without manual control, which is crucial in disaster situations.
- Established Communication Between AI and the Arduino We successfully linked Python (AI detection) to the Arduino motor control system via serial communication. The system reacts instantly when a human is detected, demonstrating smooth integration between software and hardware.
- Overcame Power and Motion Limitations Despite initial setbacks with slow motor movement and power drain, we analyzed and improved power distribution. We identified inefficiencies in the L298N motor driver and explored alternatives like TB6612FNG for better performance. This understanding of power management and optimization will help improve future iterations.
What we learned
Throughout the development of the Autonomous SOS Rescue Robot, we gained valuable insights into wireless communication, power management, and hardware optimization. Each challenge we encountered provided an opportunity to improve our approach and enhance the robot’s overall performance.
- Wireless Communication is Not Always Reliable Initially, we aimed to use Bluetooth (HC-06) to transmit data from a Python script to the Arduino, but we quickly learned that:
Bluetooth has significant reliability issues when it comes to real-time data transfer. Connection stability depends on multiple factors, including signal interference and distance limitations. Alternative communication methods (such as Wi-Fi or RF modules) offer more robust performance, especially in dynamic environments. This experience taught us the importance of testing different communication protocols and selecting the one that best suits the application’s requirements.
- Power Management is Crucial for Robotics One of the biggest issues we faced was rapid battery depletion caused by the DC motors drawing excessive power. We learned that:
The L298N motor driver is highly inefficient, leading to power loss in the form of heat. Running multiple high-power components from a single battery source can cause voltage drops, affecting the entire system’s stability. Using a more efficient motor driver (such as TB6612FNG) and separate power sources for motors and control circuits significantly improved battery life and performance. This highlighted the importance of proper power distribution and selecting efficient components for battery-powered systems.
- Motor Performance is Highly Dependent on Power Supply Initially, our robot’s motors were too slow and lacked torque, which made movement inefficient. We learned that:
Voltage and current play a critical role in motor speed and torque—our initial power setup was insufficient. Motor drivers need to be matched to the motors' power requirements to avoid bottlenecks in performance. Higher-efficiency motor drivers can drastically improve movement while consuming less power. Through trial and error, we realized the need to carefully calculate power requirements and select components that can handle the necessary load.
- Iteration and Testing are Key to Success Perhaps the most important lesson we learned is that no hardware or software solution works perfectly on the first attempt.
Every failure provided insights into how to improve the design. Hands-on testing is crucial—many issues (such as power drain and slow motor movement) were only discovered after real-world testing. Flexibility in problem-solving is essential—when Bluetooth failed, we quickly explored other options rather than forcing a flawed solution.
What's next for Rescue Detection Robot
While our Autonomous SOS Rescue Robot has successfully demonstrated autonomous navigation, obstacle avoidance, and human detection, there is still room for significant improvement. Moving forward, we aim to enhance the robot’s processing power, wireless capabilities, and overall efficiency to make it more practical for real-world rescue missions.
- Upgrading to a More Powerful Computer for Better Human Detection Currently, our robot relies on a basic microcontroller and external processing for AI-based detection. While this works for testing, it has limitations in speed and accuracy when identifying people in real-time. To improve this:
We plan to integrate a more powerful onboard computer (such as a Raspberry Pi 4, NVIDIA Jetson Nano, or an edge AI processor) that can run object detection locally instead of relying on an external system. This upgrade will allow the robot to process images and detect humans with higher accuracy and speed, making it more reliable in real-world disaster zones.
- Improving Wireless Communication for Practical Use Initially, we attempted to use Bluetooth (HC-06) for communication, but it had connectivity issues, short range, and unreliable data transmission. To make the robot truly wireless and practical, we need a more robust communication system. Our next steps include:
Exploring Bluetooth 5.0 or BLE (Bluetooth Low Energy), which offers better range, lower power consumption, and more stable connections. Considering Wi-Fi or RF communication modules that would allow for longer-range remote control and real-time data transmission. Integrating mobile app or cloud-based control, so rescuers can monitor and control the robot remotely from anywhere.
- Enhancing Mobility and Power Efficiency One of our biggest challenges was battery drain and slow motor movement due to the inefficiency of the L298N motor driver. To make the robot more energy-efficient and mobile, we plan to:
Switch to a more efficient motor driver (such as TB6612FNG or Cytron MD10C) to reduce power loss and increase battery life. Upgrade to more powerful motors or gear ratios that provide better torque and speed, allowing the robot to move more effectively over debris or uneven terrain. Implement a dual-battery system—one for motors and one for processing—to prevent sudden shutdowns due to power fluctuations.
- Expanding Functionalities for Real-World Rescue To further increase its usefulness in search-and-rescue operations, we plan to add:
Thermal imaging sensors to detect heat signatures from survivors trapped under debris. A speaker and microphone system for two-way communication between trapped individuals and rescue teams. GPS tracking and mapping to help rescuers locate detected individuals quickly and efficiently.




Log in or sign up for Devpost to join the conversation.