

Inspiration
Originally, our idea was of a robotic cow that would serve as idle entertainment. It would walk around on tables and do random cow-like things, like eat napkins. In an effort to bring a bit more purpose to our project, we decided to pivot towards a small, IoT agriculture rover that would gather data for farmers.
What it does
The Moomba roams agricultural fields, gathers environmental and visual data of its surroundings, and uploads the data to internet applications for further analysis. As the Moomba moves, it measures temperature, humidity, soil moisture, light levels, and level-of-greenness in a field, which could all be indicators of a field’s health or needs. With the potential for fully autonomous movement, farmers will have easy-access to data that could influence the amount of water, pesticides, or fertilizers used in farming, which could have a significant impact on reducing greenhouse gas emissions, land use, water use, and pollution.
How we built it
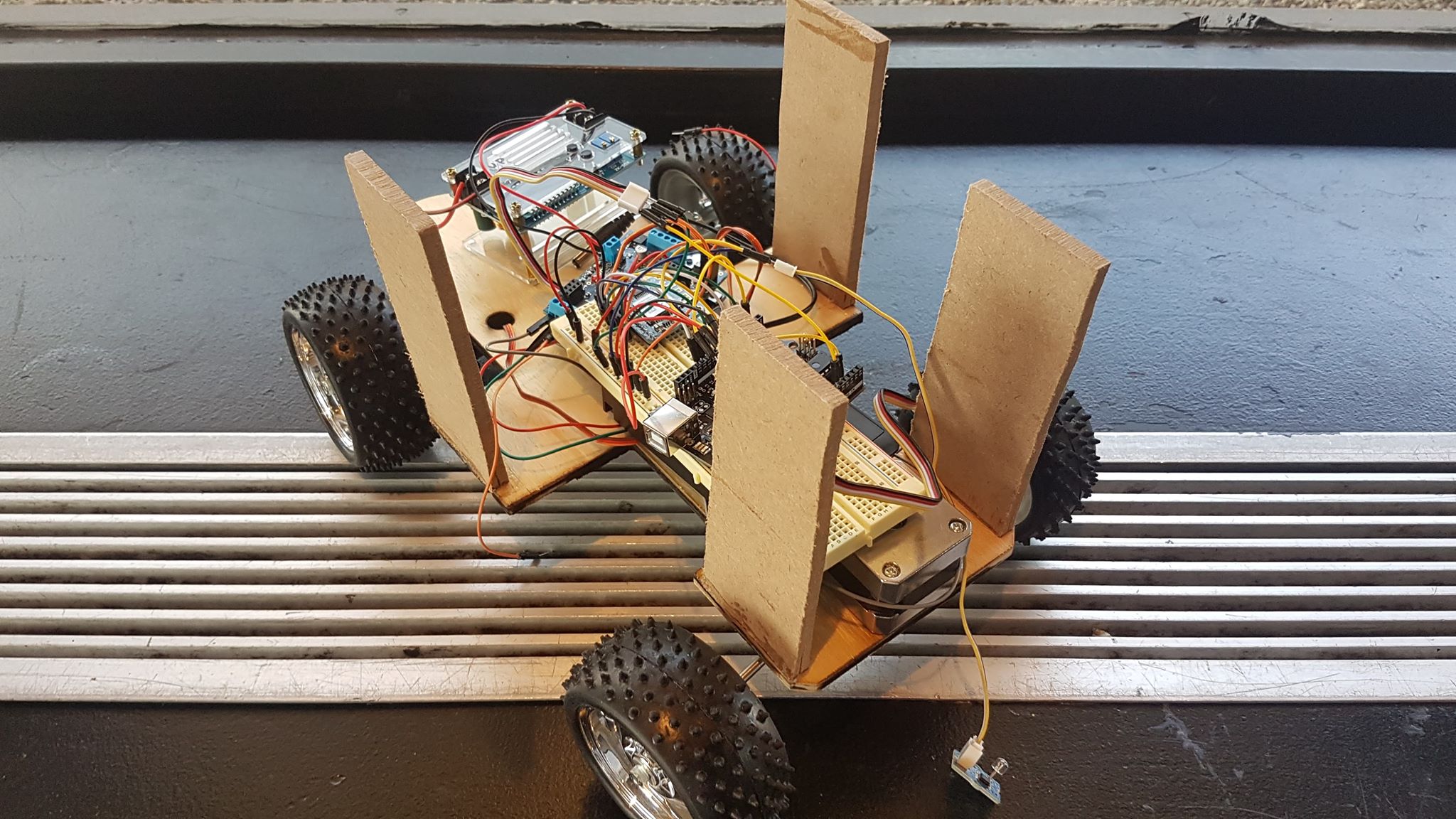
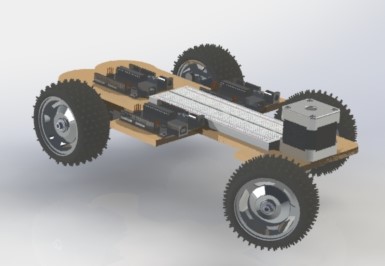
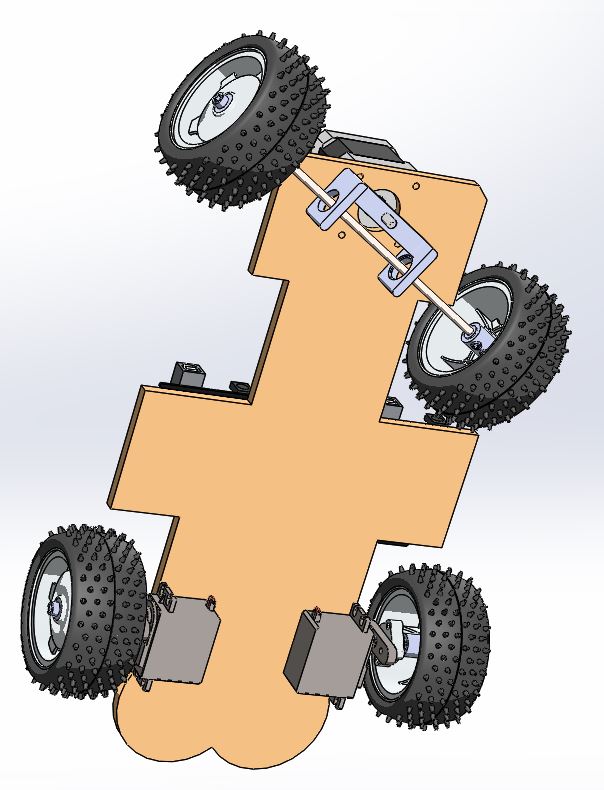
We started out with sketches for a général 2 wheel drive car; we decided to go for two wheel drive with two continuous servo motors attached to the back wheels. Steering was accomplished by a NEMA 17 stepper motor. The wheel-axle assemblies were assembled using long metal dowels, bearings, and screw hubs. The chassis was laser cut, and the front axle had a 3D printed component to change the axis of rotation by 90 degrees.
The main microcontroller was an Arduino Uno; the servo motors were attached directly to its GPIO pins, and the NEMA 17 stepper motor was connected to a motor shield powered by a boost converter. An attempt was made to have the system controllable by Bluetooth via an Adafruit Feather M0 BLE microcontroller and the Bluefruit LE app. Due to time constraints, we were unable to do this; our stopping point was receiving commands from the iPhone into the serial communication of the Feather.
Our IoT sensors are made possible through the combination of Arduino modules and Seeed Grove Launchpad Sensors. We linked temperature, humidity, light, and soil moisture sensors to a wifi module using an Arduino Uno, enabling us to upload data to a Google spreadsheet via pushingbox. To provide a user interface for downloading and viewing data relevant for agricultural decision-making, the data is hosted on a live-updated Google data report.
Image data was taken using a Raspberry Pi 3B+ using a Pi Camera. Images were taken every other second to image the surrounding area. Files were stored on the SD card using a datetime code so that the user can correlate time with position for the system. Basic image processing was used to determine the percentage of green in the photos taken. This was used to determine health with the idea that more green meant healthier crops.
Challenges we ran into
Making things “work” with the resources available to us was our biggest challenge. We needed to be flexible with the specifications of our project, as components we wanted to use were often not provided or incompatible with other key components of our project.
Accomplishments that we’re proud of
Combining all our unique skills and interests to make a decent IoT robot with limited resources was a true accomplishment.
What's next for Moomba
With limited resources, we created a working prototype that includes a chassis, body, remote controls, IoT environmental sensors, and data visualization. With more time and resources, we would create a more durable design and build an interactive interface for data collection and analysis.
Built With
- arduino
- google-data-studio
- google-spreadsheets
- iot
- pushingbox
- raspberry-pi



Log in or sign up for Devpost to join the conversation.