Inspiration
Interest in self driving car technology
What it does
Provides auditory feedback to user of the obstacles in their path in the case of walking down the sidewalk.
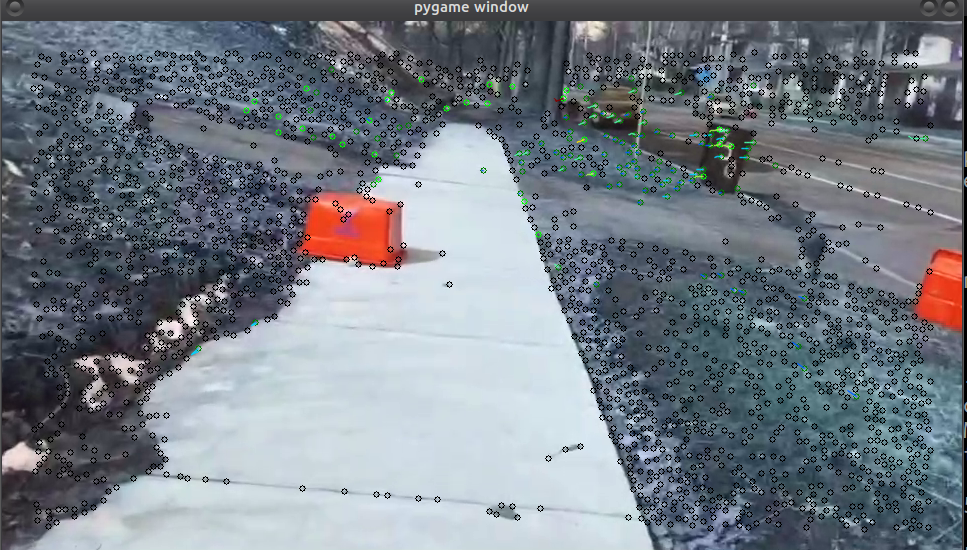
How we built it
We built a SLAM algorithm, and fed it to a convolutional neural network to make predictions of the surrounding obstructions, and then translated these predictions into speech
Challenges we ran into
Raspberry pi memory constraints
Accomplishments that we're proud of
We accomplished what systems with many additional sensors achieve, with only one camera.
What we learned
The importance of multithreading/multiprocessing
What's next for Moncolular Obstruction Estimation for the Visually Impaired
Adding loop closure, porting to a smartphone or more powerful integrated circuit (FPGA, or cloud platform)

Log in or sign up for Devpost to join the conversation.