-
-
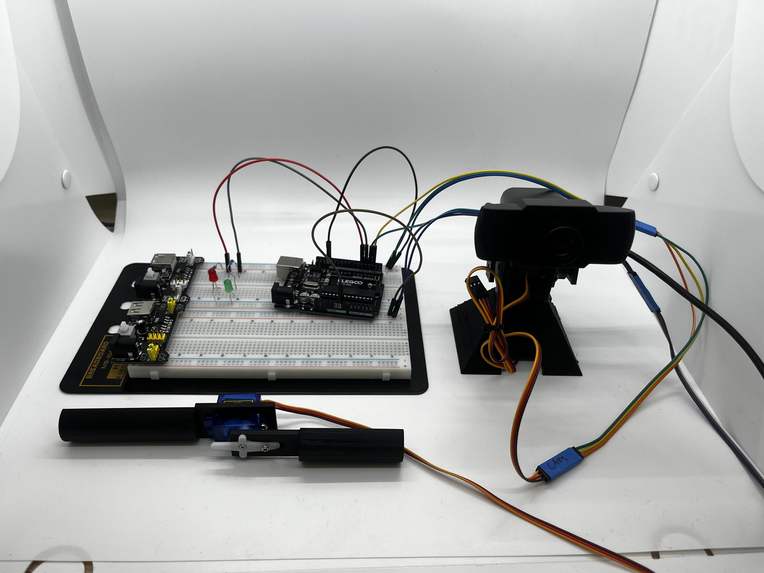
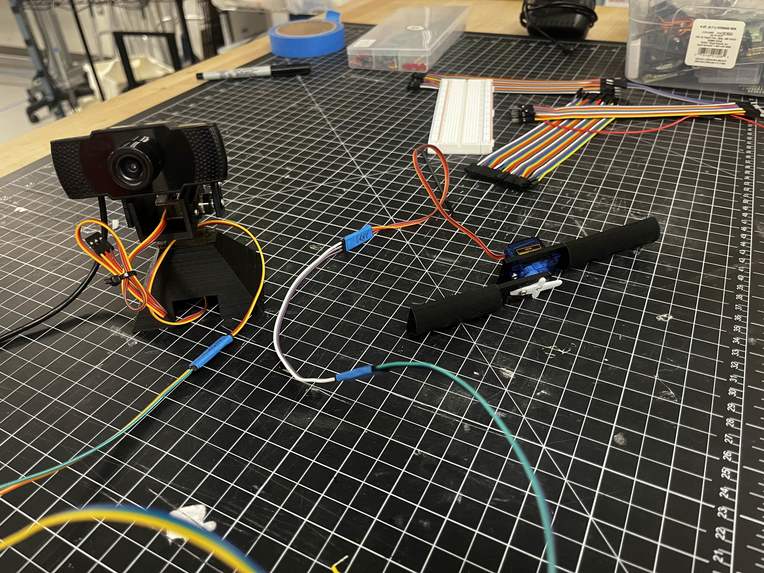
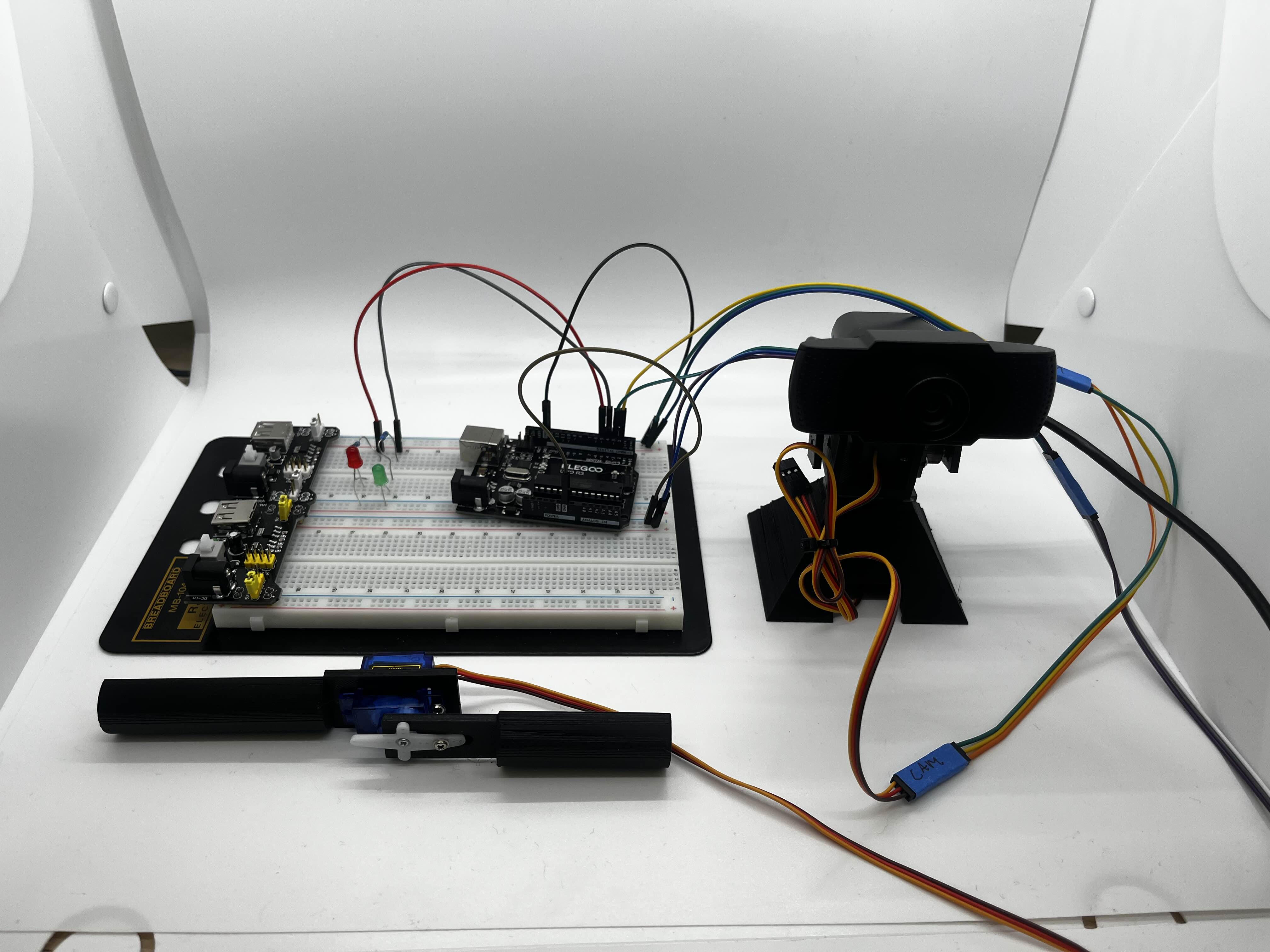
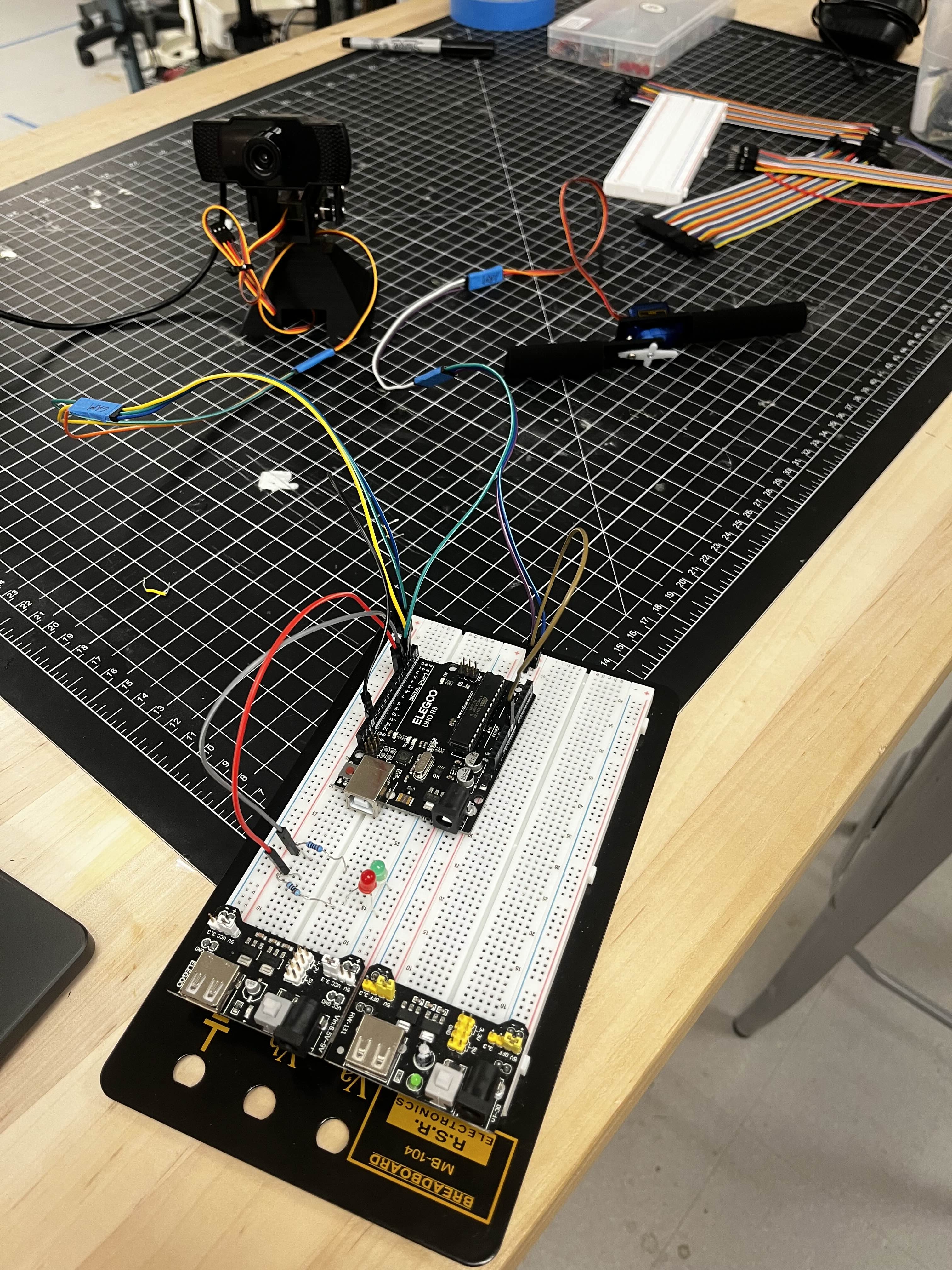
all the hardware
-
-
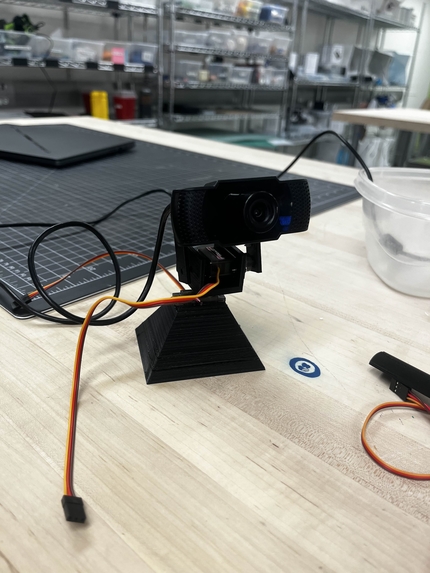
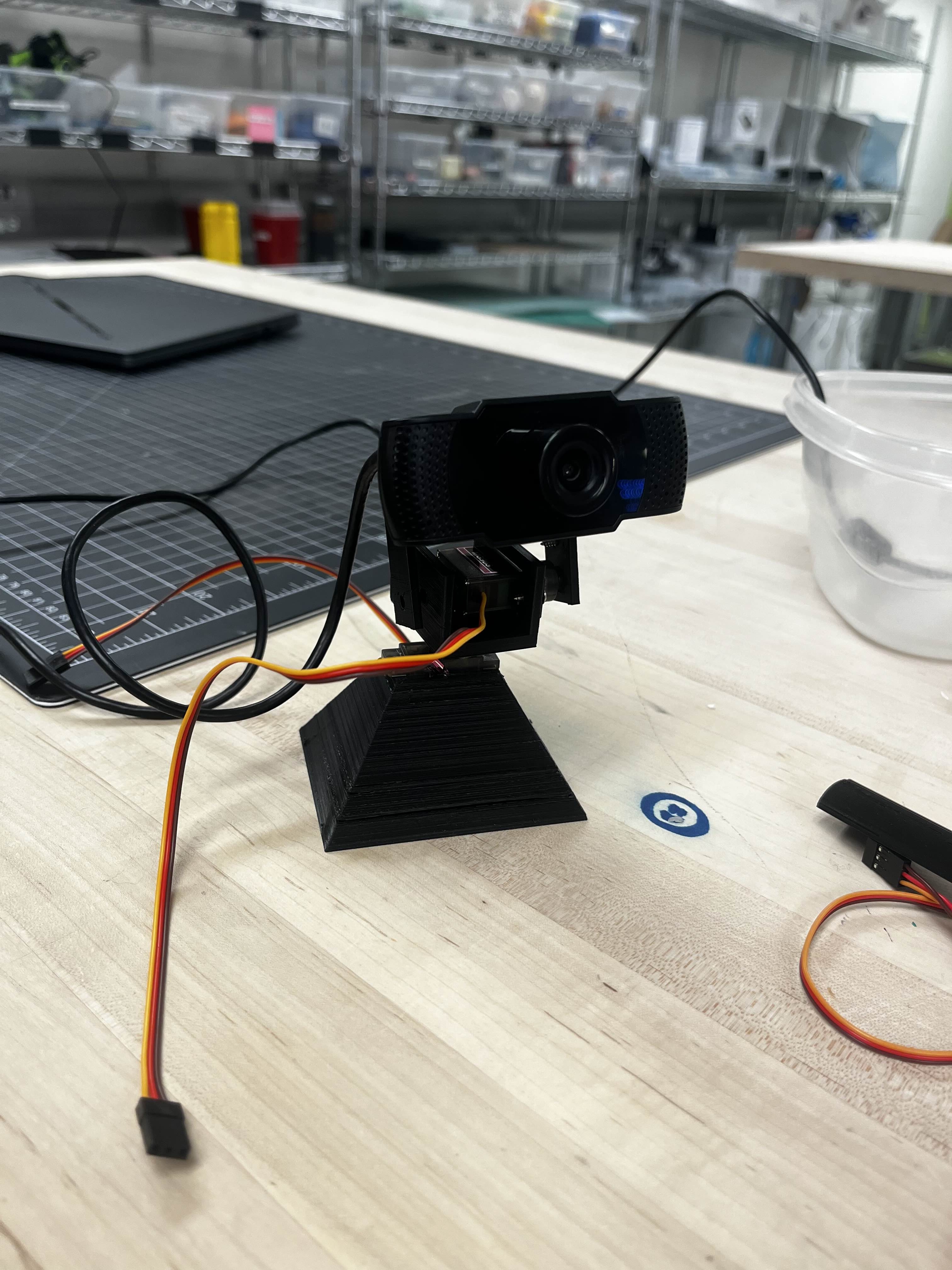
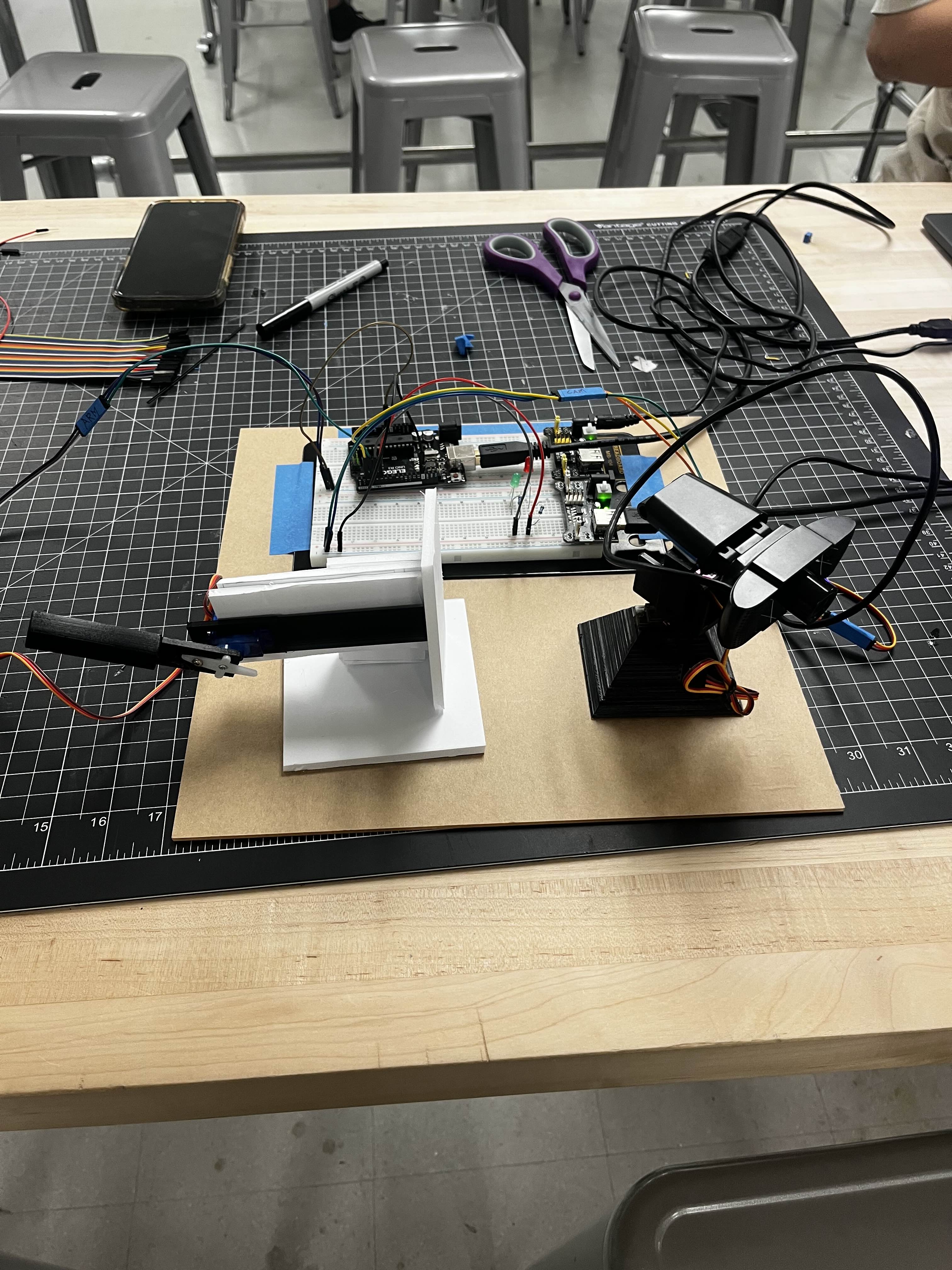
Robot with camera and servos
-

-
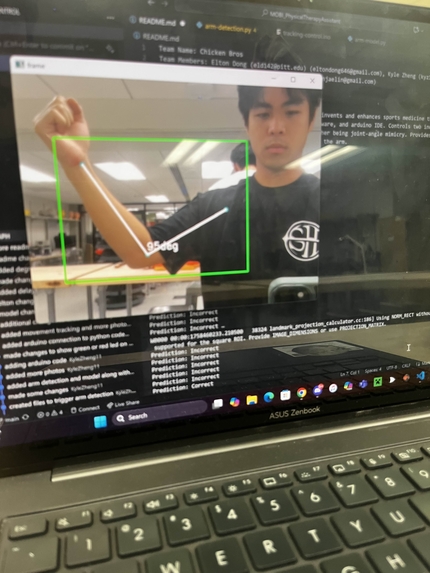
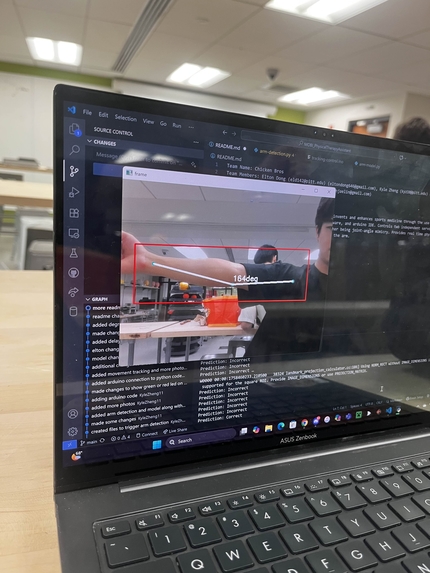
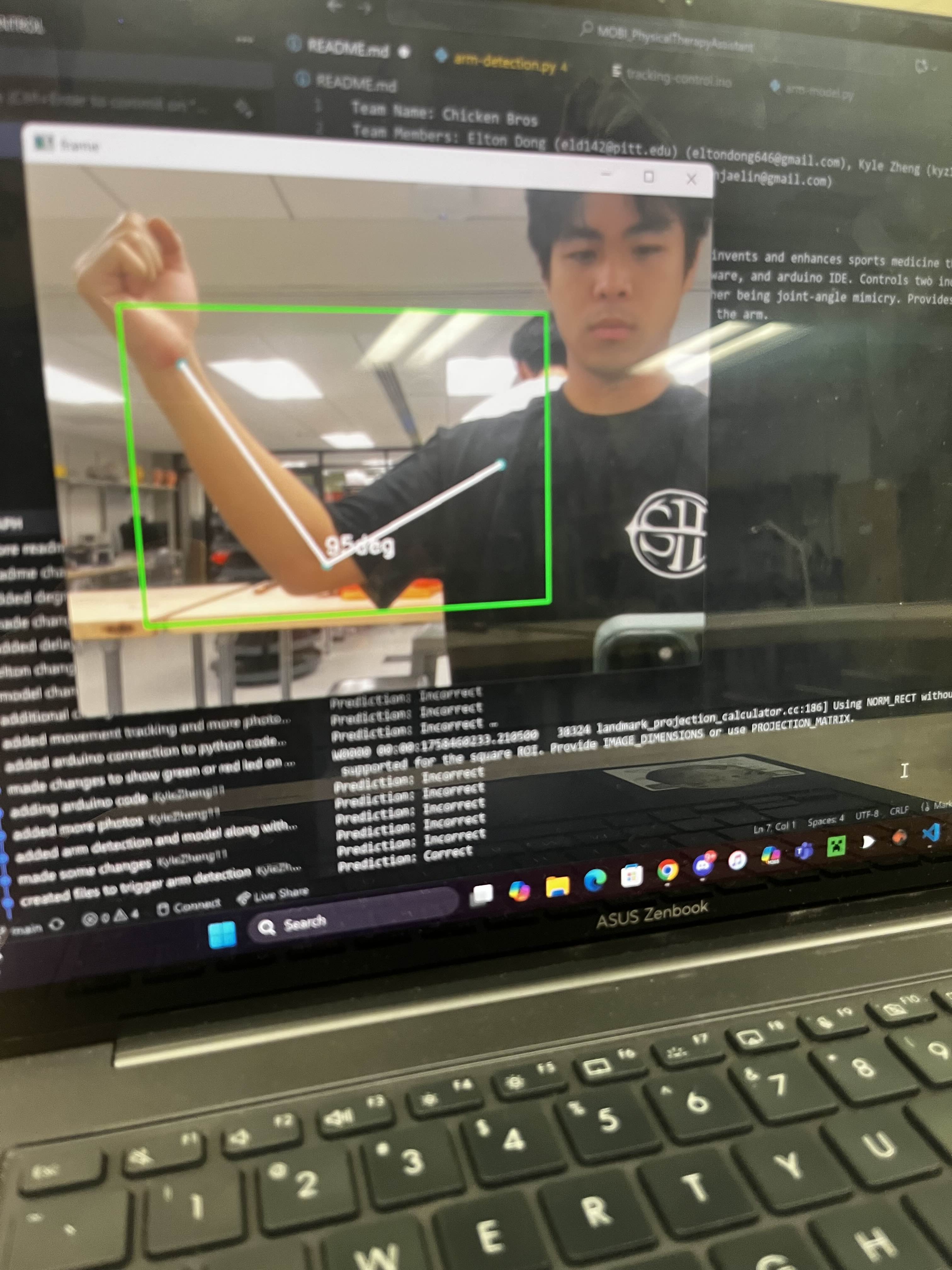
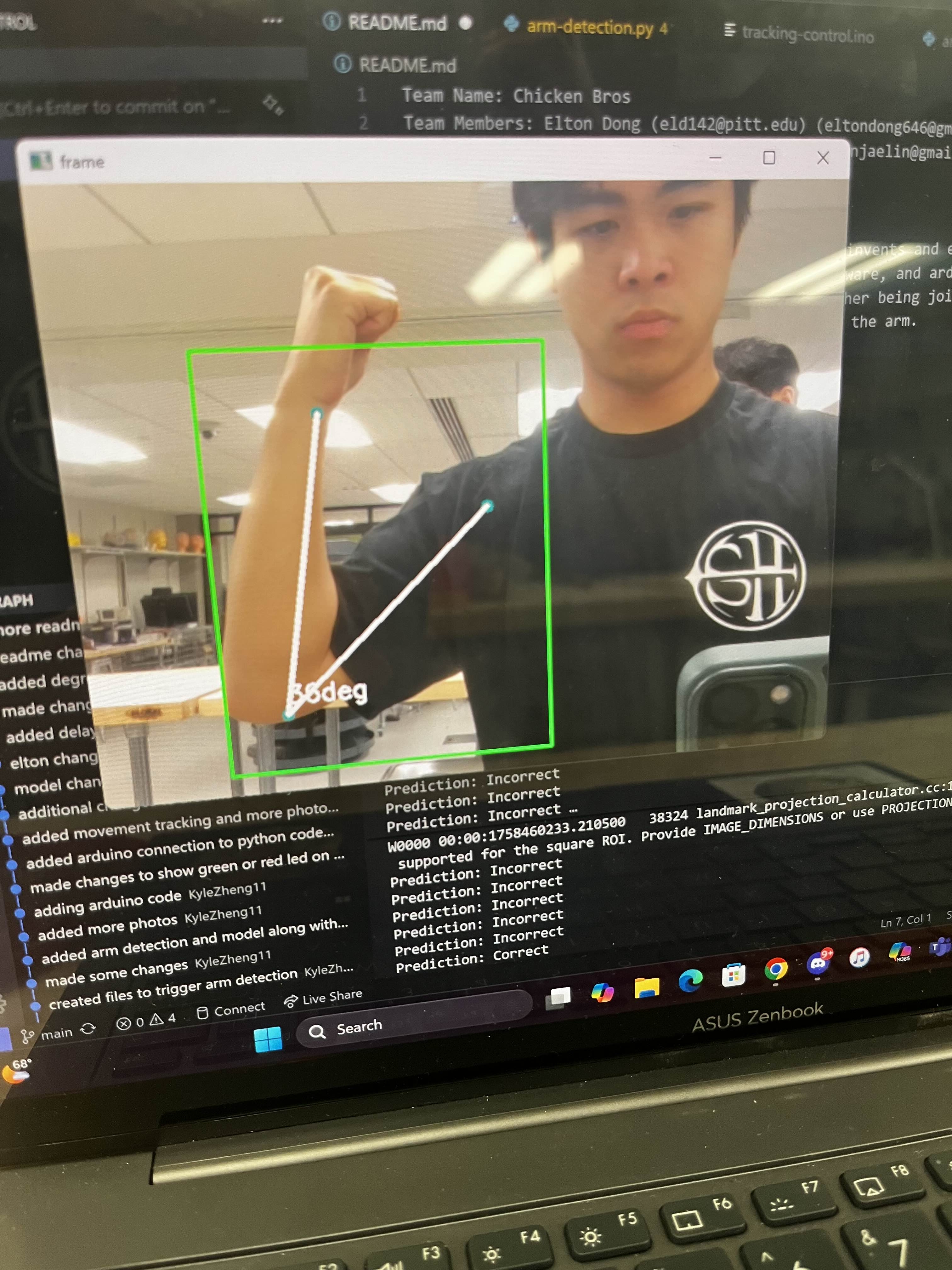
correct flexion
-
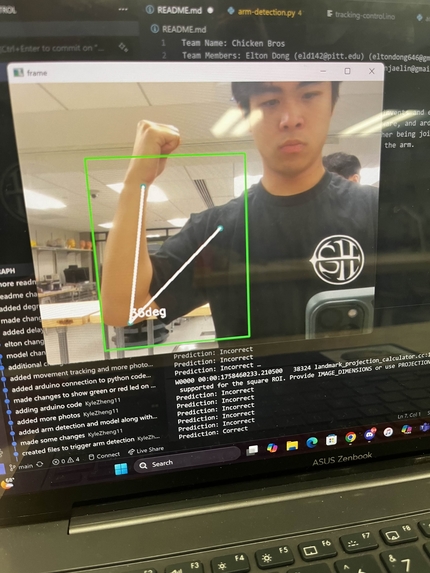
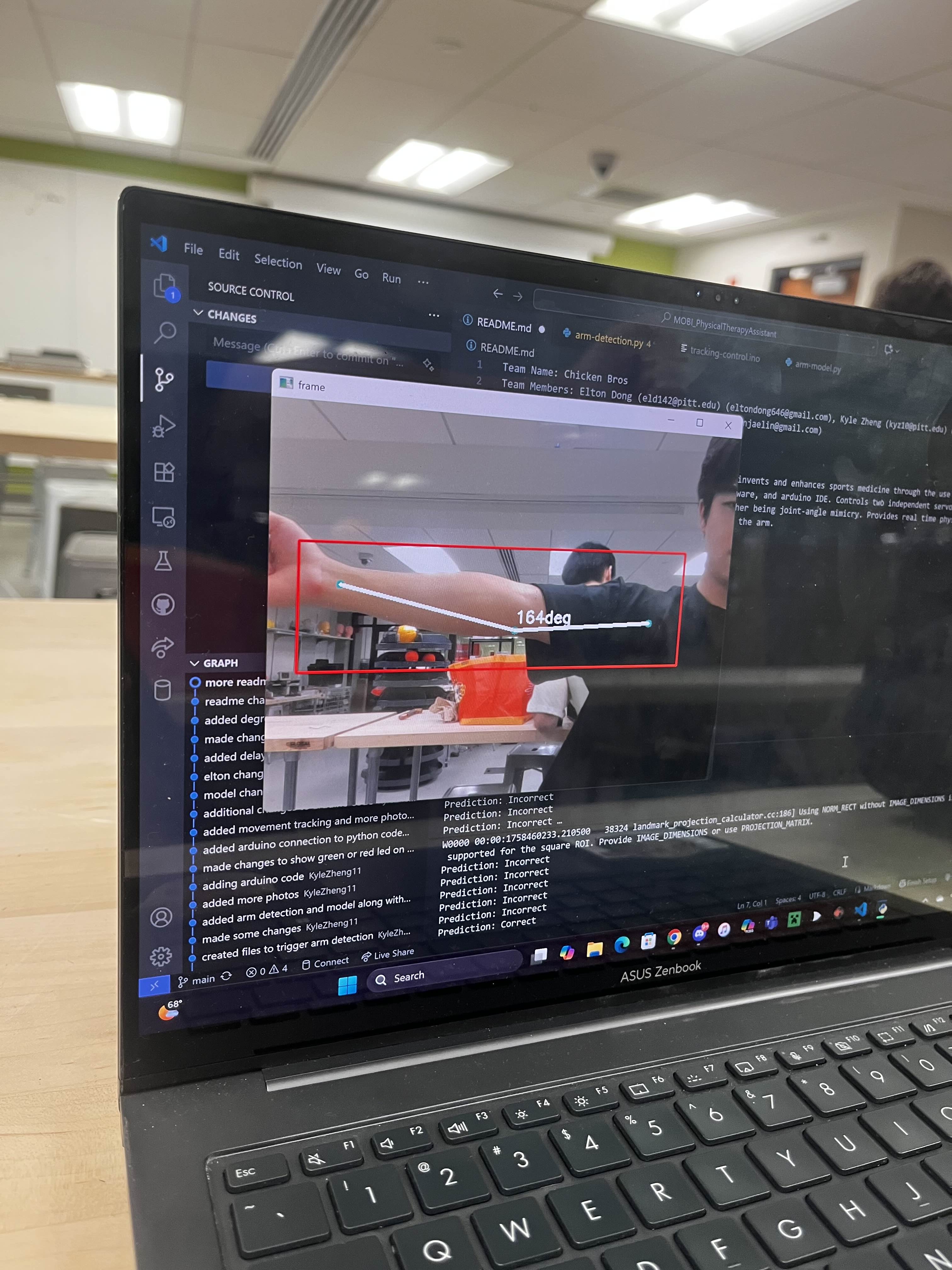
incorrect flexion
-
-

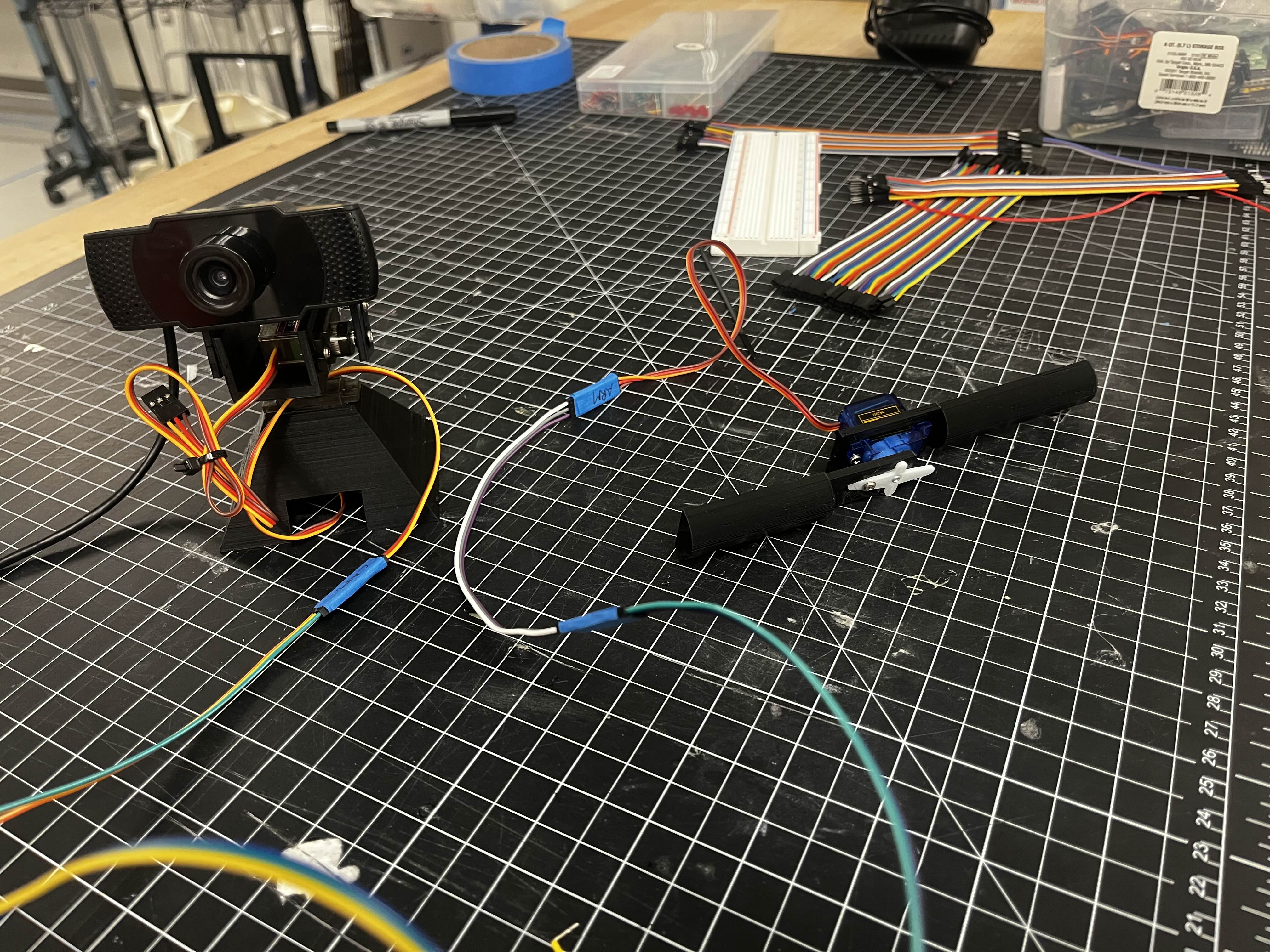
servo that tracks mimmicks arm angle
-
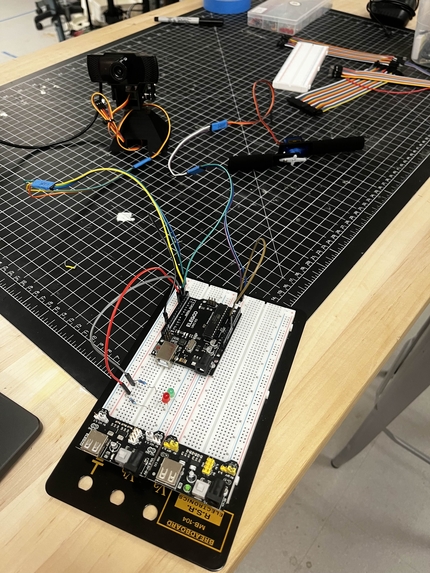
breadboard
-
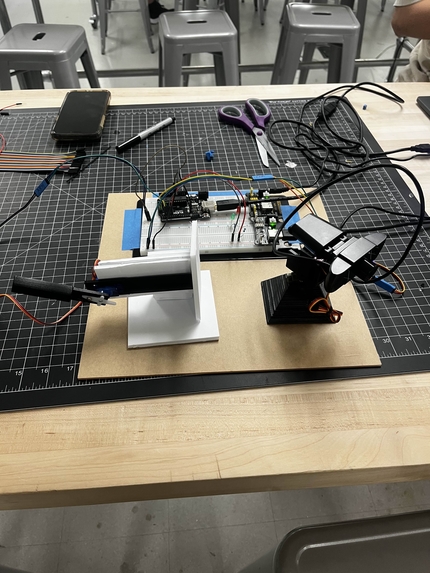
Full set up


Inspiration: Passion for sports medicine. Lifelong interest in biomedical technology with the use of computer science.
What it does: Controls two independent servos, one being for auto camera calibration tracking and the other being joint-angle mimicry. Provides real time physical feedback to both user and expert on immediate flexion of the arm.
How we built it
Utilized Python, openCV, mediaPipe, arduino hardware, and arduino IDE to connect software and hardware. Used computer vision to create a model and give feedback. The Software sends the arduino the necessary data to act on it.
Challenges we ran into
Connecting the hardware and software. Running into breaking circuitry and frying it. Coding issues revolved around openCV and mediaPipe.
Accomplishments that we're proud of
Figuring out how to connect new hardware. Being able to bring our idea into fruition in a good package.
What we learned
Lots of new stuff about computer vision, how arduinos communicate, openCV, mediaPipe, and arduino IDE/Code.
What's next for MOBI
More integration into different parts of the body. Full 360 camera tracking. Use of a website to control start/end of camera tracking.



Log in or sign up for Devpost to join the conversation.