Inspiration: Recently one of my team members was admitted to a hospital due to severe migraine. However, the hospital was understaffed and no one was there to tend to him, even for basic essentials.
What it does: Notifies the nurses in the hospital with an installed alarm while carrying basic essentials to the patients. In short, it acts as an emergency dispatch unit.
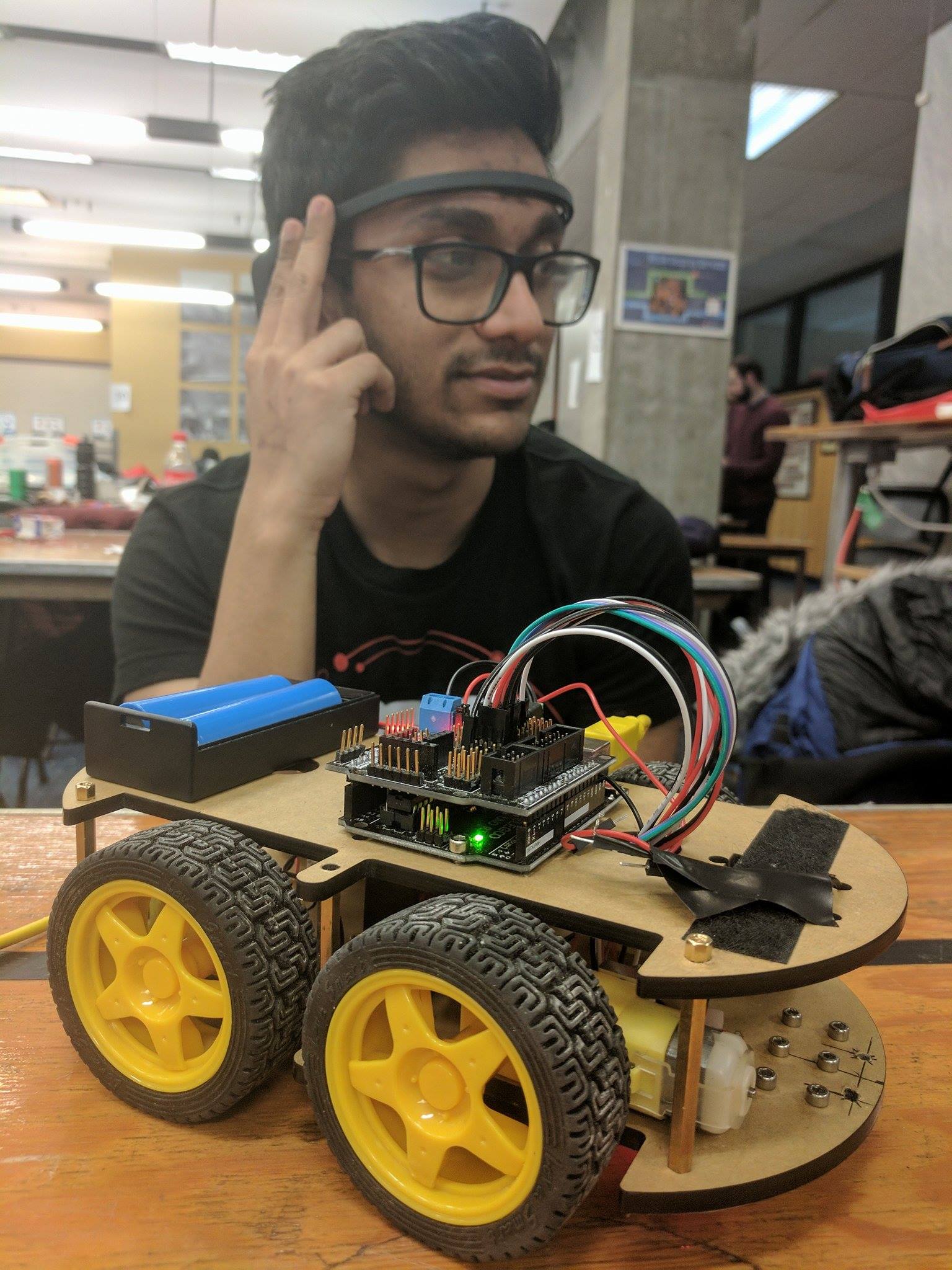
How we built it The patient will be using a Muse headband, when the head band detects a jaw clench it will send a signal to a computer, which is connected to robot (that uses an Arduino platform). Furthermore, this robot has line tracking modules.
Challenges we ran into We used National Instrument's myRio (which is a new hardware), therefore it was hard to find enough online resources to implement it properly. Although we got the robot moving, we were unable to send the muse signals to the myRio. Therefore, we had to implement the robot using an arduino The hardest thing was integrating the muse with the arduino, and then communicating with the arduino via WiFi. They operate on completely different protocols and formats, (like OSC). The robot itself was very mechanically imperfect, and quite often the wheels slipped.
Accomplishments that we're proud of
Considering this was the first time we tried interfacing with wearable technology and new hardware, we are proud to have actually managed to separately program a line following robot, and a muse enabled motor that can turn on/off depending on your thoughts!
What we learned
The design process is always an iterative one. We had to change our design at 2 am, nullyfing all our hard work for the entire day. ,However, we are glad we could make this kind of tough decision, and I feel we as a team have gotten stronger more experienced because of it. Maybe next time, we'll win!
What's next for MindSweeper
We would love to be able to work with this really cool piece of technology, and there are countless medical/psychological benefits that can be made through projects like this. The next step would be writing proper interfacing libraries, so others can build on our work as well!

Log in or sign up for Devpost to join the conversation.