-
-
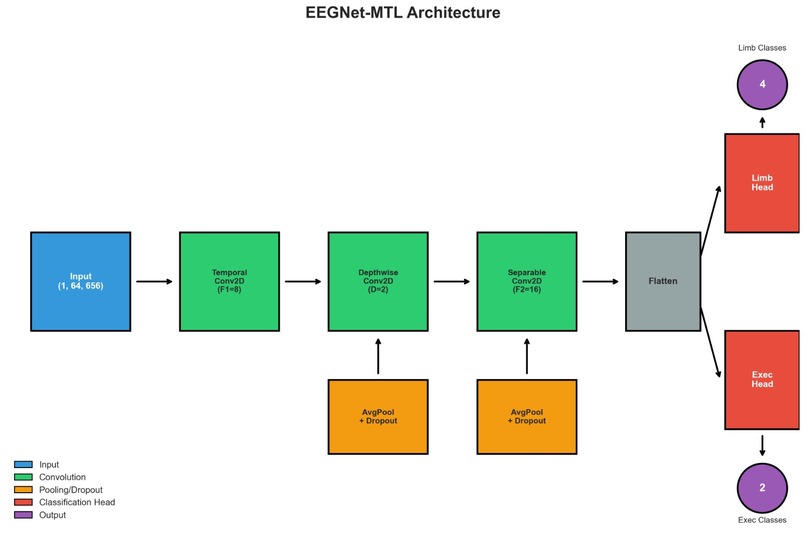
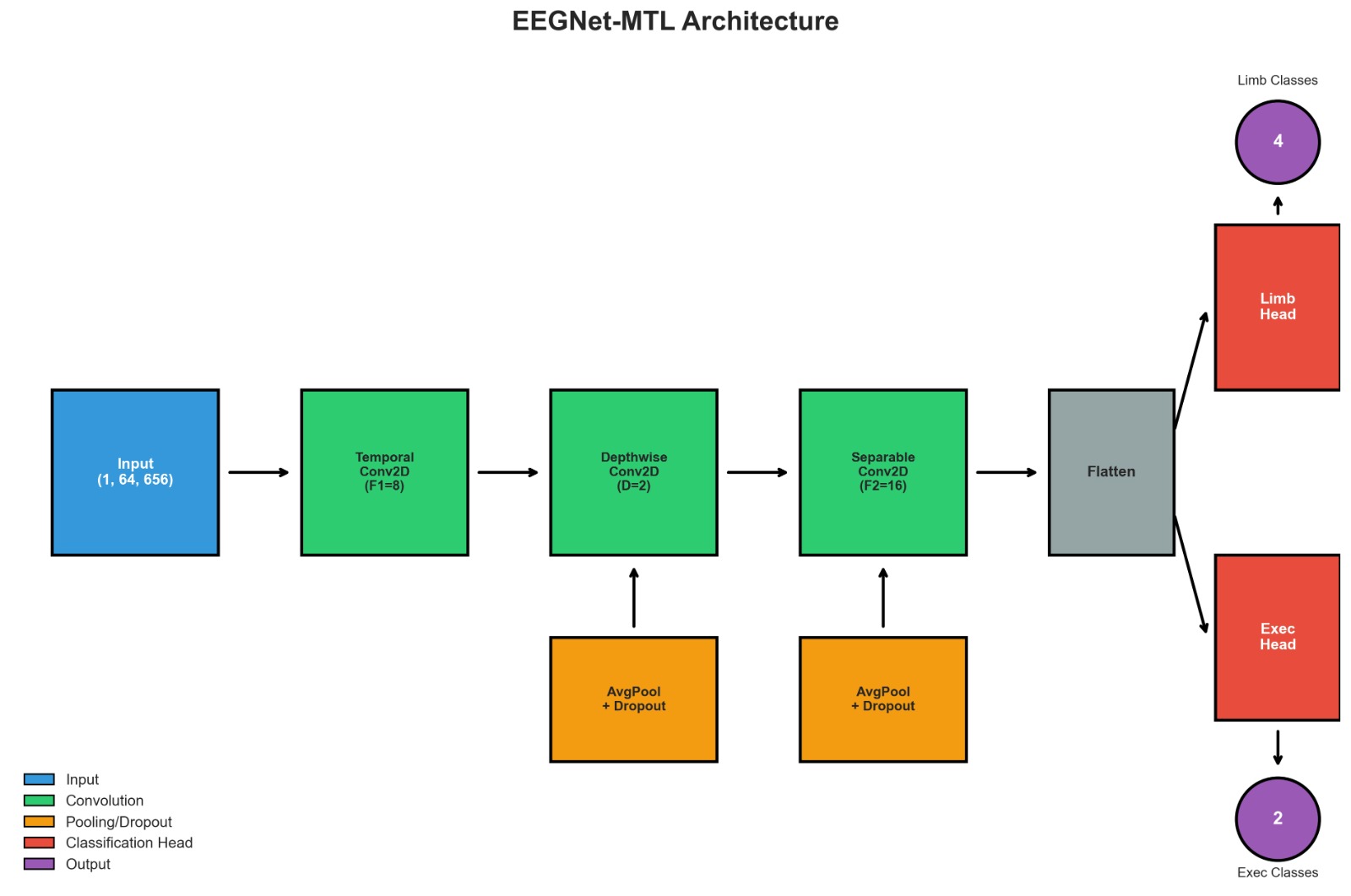
EEGNet-inspired multi-task architecture with shared feature extraction and dual heads for limb and execution type classification.
-
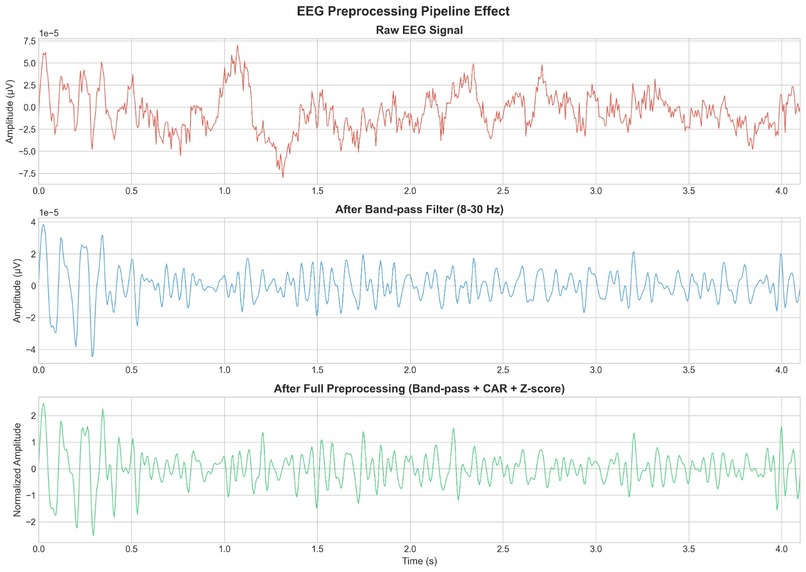
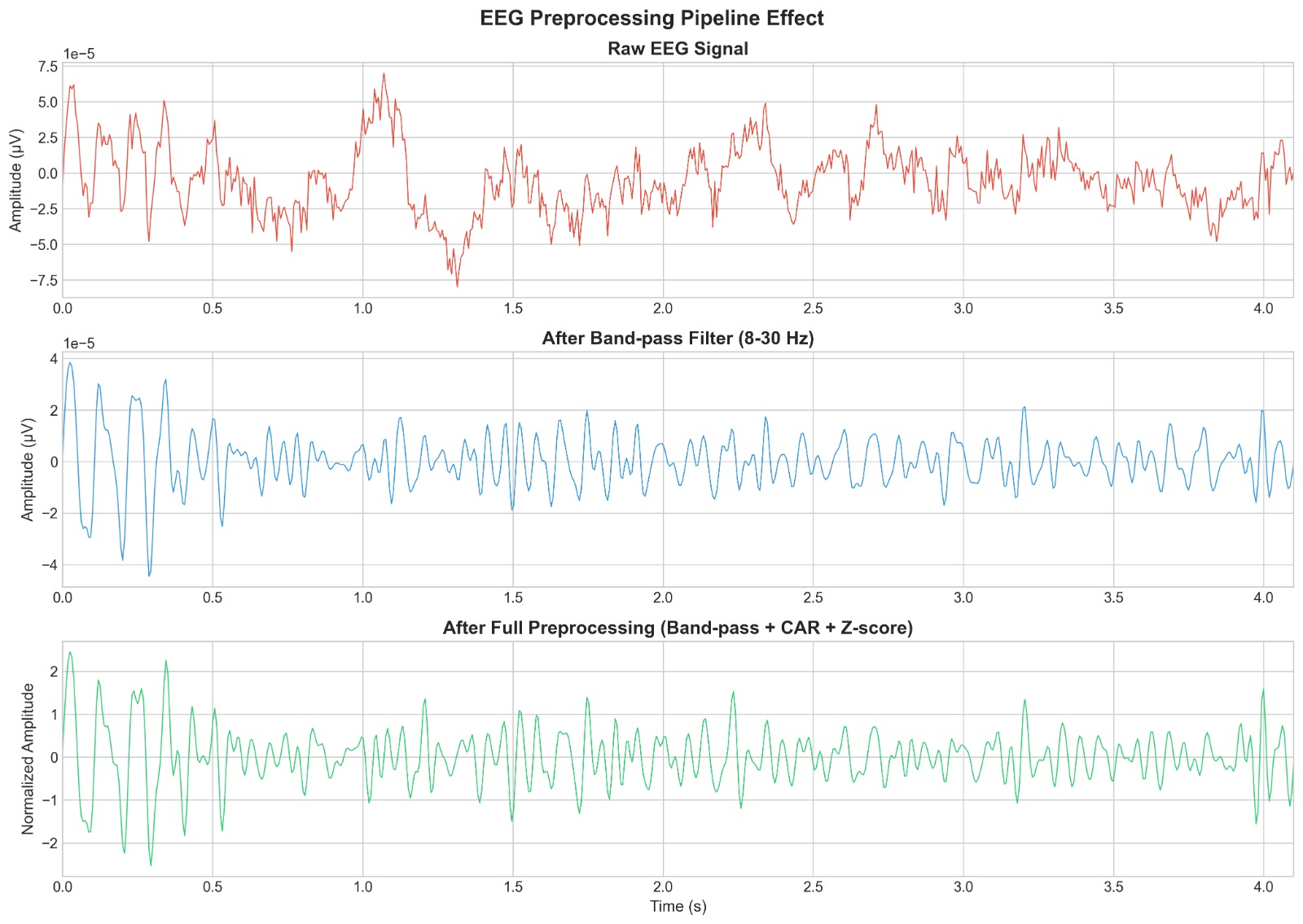
Effect of EEG preprocessing: raw signal, band-pass filtering (8–30 Hz), and full normalization with CAR and z-score.
-
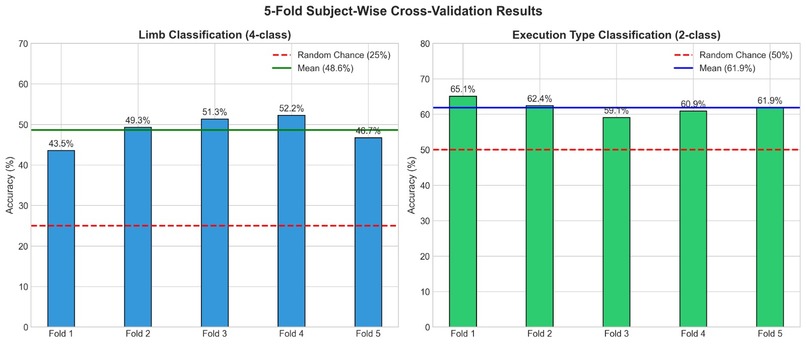
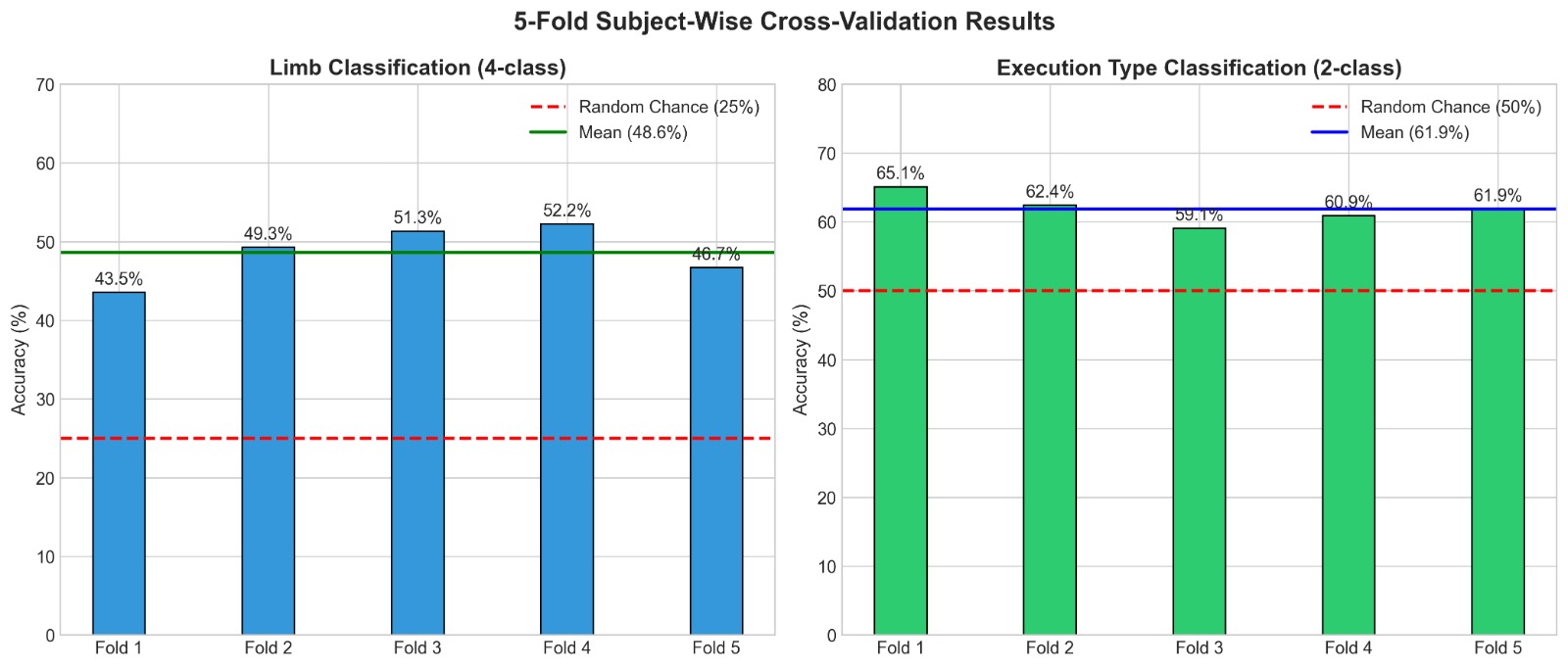
Five-fold subject-wise cross-validation results showing model performance consistently above random chance.
-
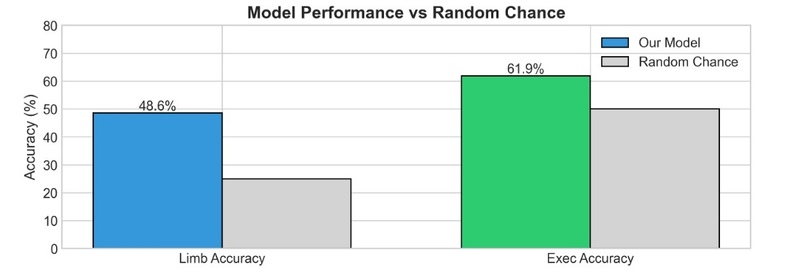
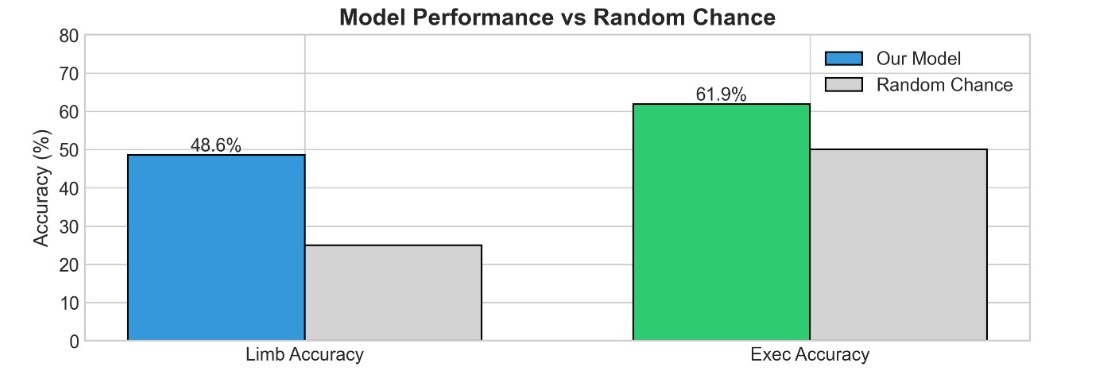
Final model accuracy compared to random chance for limb classification (4-class) and execution type (binary).
Inspiration
Millions of people worldwide live with mobility impairments that limit their independence and interaction with the physical world. Recent advances in non-invasive brain–computer interfaces (BCIs) have shown that EEG signals can capture neural patterns associated with both real and imagined movements.
This project was inspired by the challenge of transforming noisy, high-dimensional brain signals into reliable representations of human motor intent — a capability that could one day power assistive technologies such as prosthetic limbs or robotic exoskeletons.
What it does
Mind2Motion analyzes EEG recordings collected during both real and imagined motor movements. Our system aims to decode motor intent by classifying:
- Which limb is involved (left hand, right hand, both hands, or both feet)
- Whether the movement is real or imagined
This demonstrates that meaningful motor intent information can be extracted directly from EEG signals, without relying on physical movement sensors.
How we built it
We built an end-to-end EEG analysis pipeline using a multi-task deep learning approach tailored for brain–computer interfaces.
After preprocessing multi-channel EEG time-series data (band-pass filtering, common average referencing, and normalization), we trained an EEGNet-inspired neural network with shared representations and dual task-specific heads. This architecture allows the model to jointly learn both limb type and execution type (real vs. imagined) from the same EEG signals.
To ensure robust and realistic evaluation, we used subject-wise cross-validation, preventing data leakage and explicitly testing generalization to unseen participants. Throughout development, we used signal visualizations and prediction analysis to guide debugging and interpretability.
Challenges we ran into
EEG data is inherently noisy, non-stationary, and highly variable across individuals. Key challenges included:
- Preventing subject-level data leakage during evaluation
- Learning discriminative features from limited training data
- Handling overlap between similar motor tasks (e.g., single-hand vs. both-hands movements)
- Balancing model performance with interpretability and real-world applicability
Accomplishments that we're proud of
- Built a complete end-to-end EEG deep learning pipeline from raw signals to final predictions
- Successfully applied multi-task learning to decode both limb type and execution type simultaneously
- Achieved performance significantly above random chance on both classification tasks
- Demonstrated clear neural differences between real and imagined motor activity
- Designed a solution mindful of real-world BCI deployment constraints
What we learned
We gained hands-on experience working with real EEG datasets, signal preprocessing, and deep learning architectures designed specifically for brain–computer interfaces. We also learned the importance of:
- Careful validation to avoid data leakage
- Feature design and model selection for neural data
- Communicating complex neuroscience concepts clearly through visualization and structured storytelling
What's next for Mind2Motion
Future work includes:
- Transfer learning from larger EEG datasets
- Attention-based and temporal deep learning architectures
- Subject-specific adaptation for improved personalization
- Optimization for real-time BCI systems These advances could move Mind2Motion closer to practical deployment in assistive neurotechnology.
Built With
- eegnet
- mne-python
- multi-task-learning
- numpy
- python
- pytorch
- scikit-learn
- scipy
- signal-processing
- subject-wise



Log in or sign up for Devpost to join the conversation.