


Abstract:
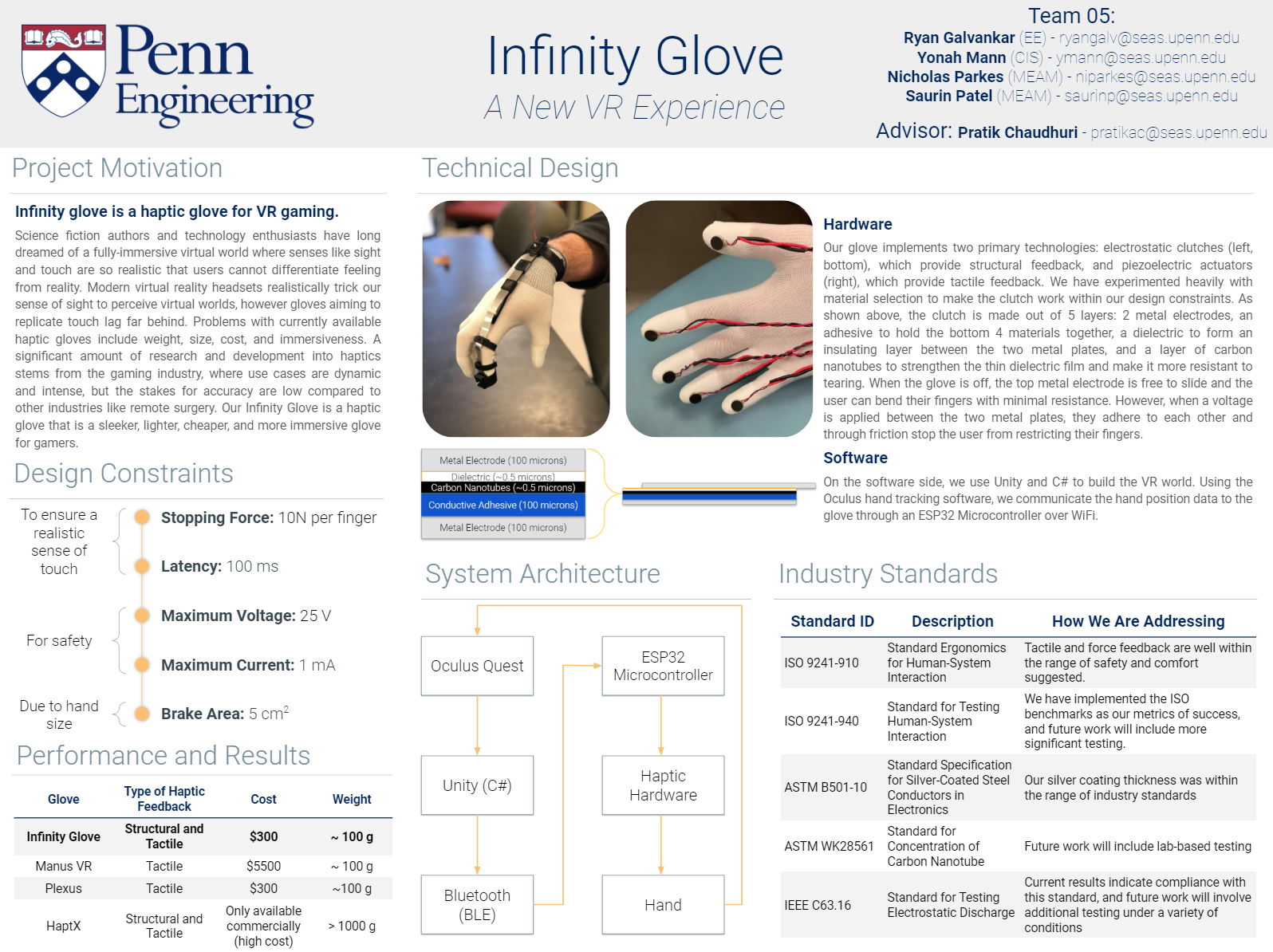
Science fiction authors and technology enthusiasts have long dreamed of a fully-immersive virtual world where senses like sight and touch are so realistic that users cannot differentiate feeling from reality. Modern virtual reality headsets realistically trick our sense of sight to perceive virtual worlds, however gloves aiming to replicate touch lag far behind. Problems with currently available haptic gloves include weight, size, cost, and immersiveness. A significant amount of research and development into haptics stems from the gaming industry, where use cases are dynamic and intense, but the stakes for accuracy are low compared to other industries like remote surgery. Our Infinity Glove is a haptic glove that is a sleeker, lighter, cheaper, and more immersive glove for gamers.
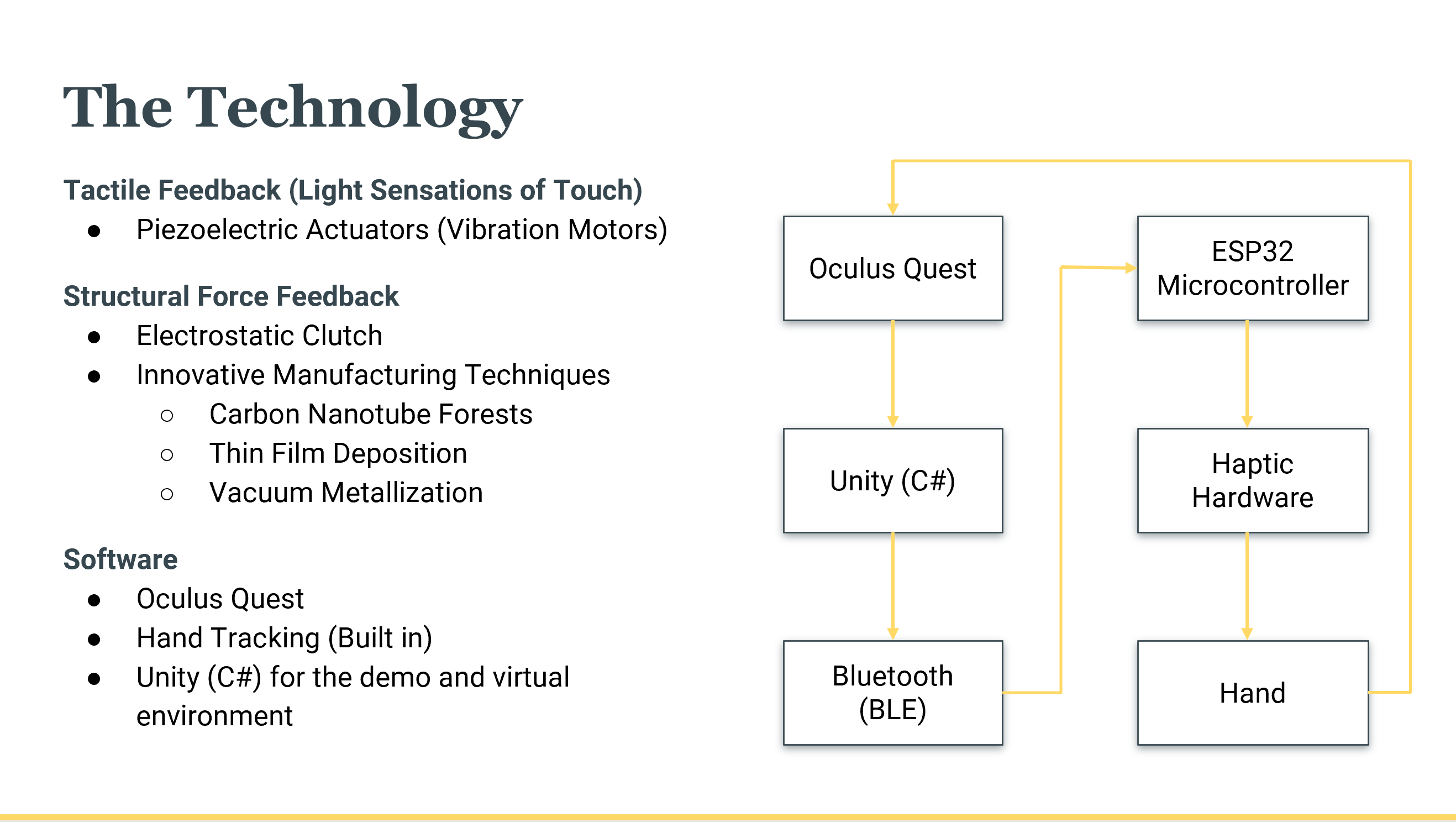
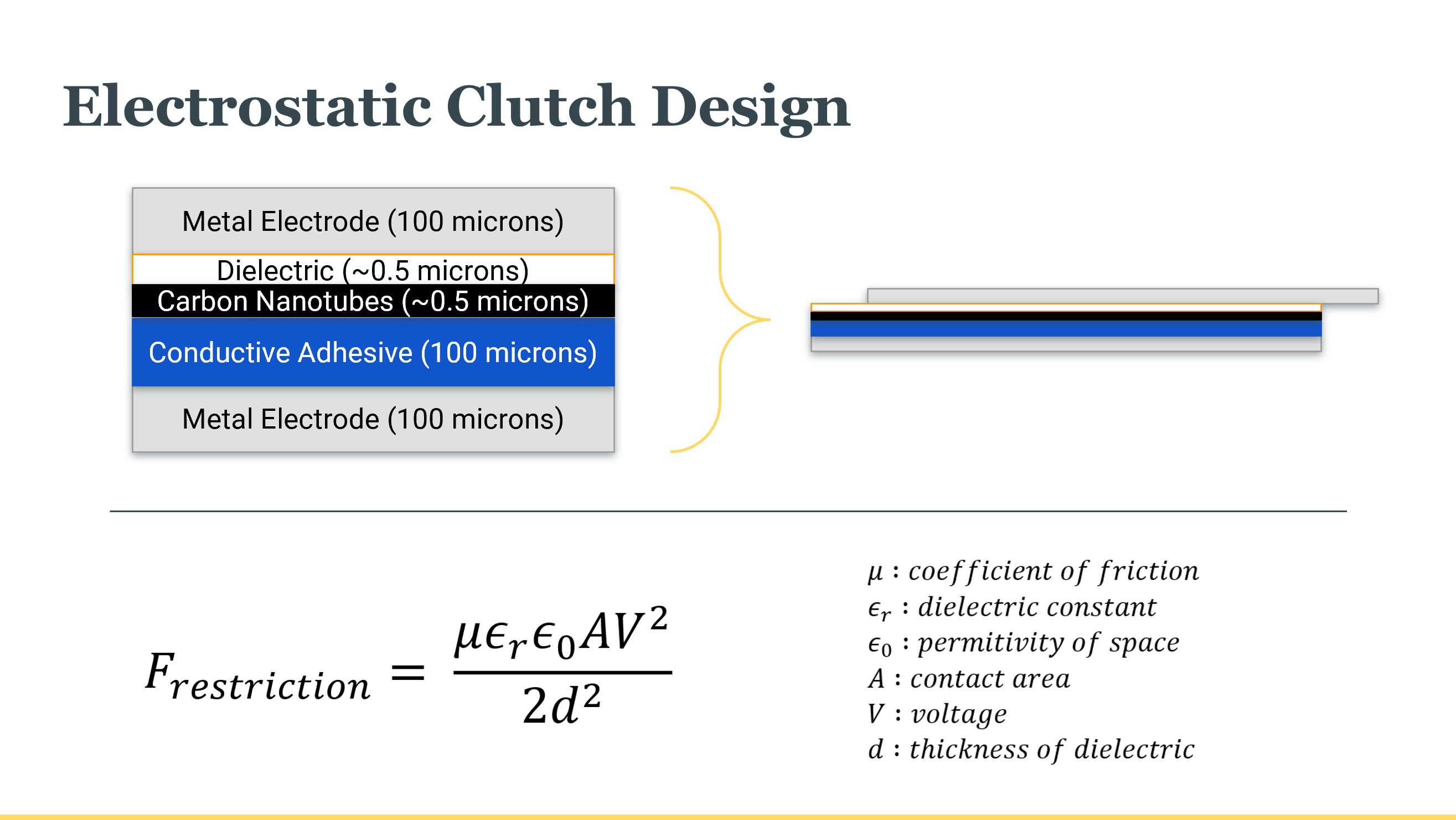
Our glove implements two primary technologies: electrostatic clutches (left, bottom), which provide structural feedback, and piezoelectric actuators (right), which provide tactile feedback. We have experimented heavily with material selection to make the clutch work within our design constraints. As shown above, the clutch is made out of 5 layers: 2 metal electrodes, an adhesive to hold the bottom 4 materials together, a dielectric to form an insulating layer between the two metal plates, and a layer of carbon nanotubes to strengthen the thin dielectric film and make it more resistant to tearing. When the glove is off, the top metal electrode is free to slide and the user can bend their fingers with minimal resistance. However, when a voltage is applied between the two metal plates, they adhere to each other and through friction stop the user from restricting their fingers.




Log in or sign up for Devpost to join the conversation.