-

Crane
-
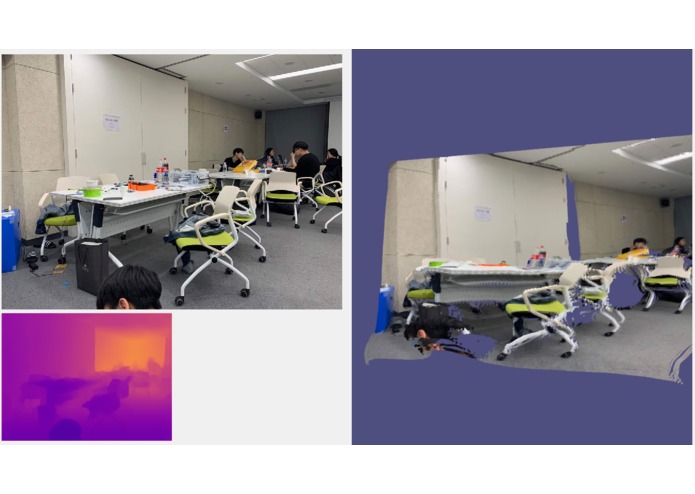
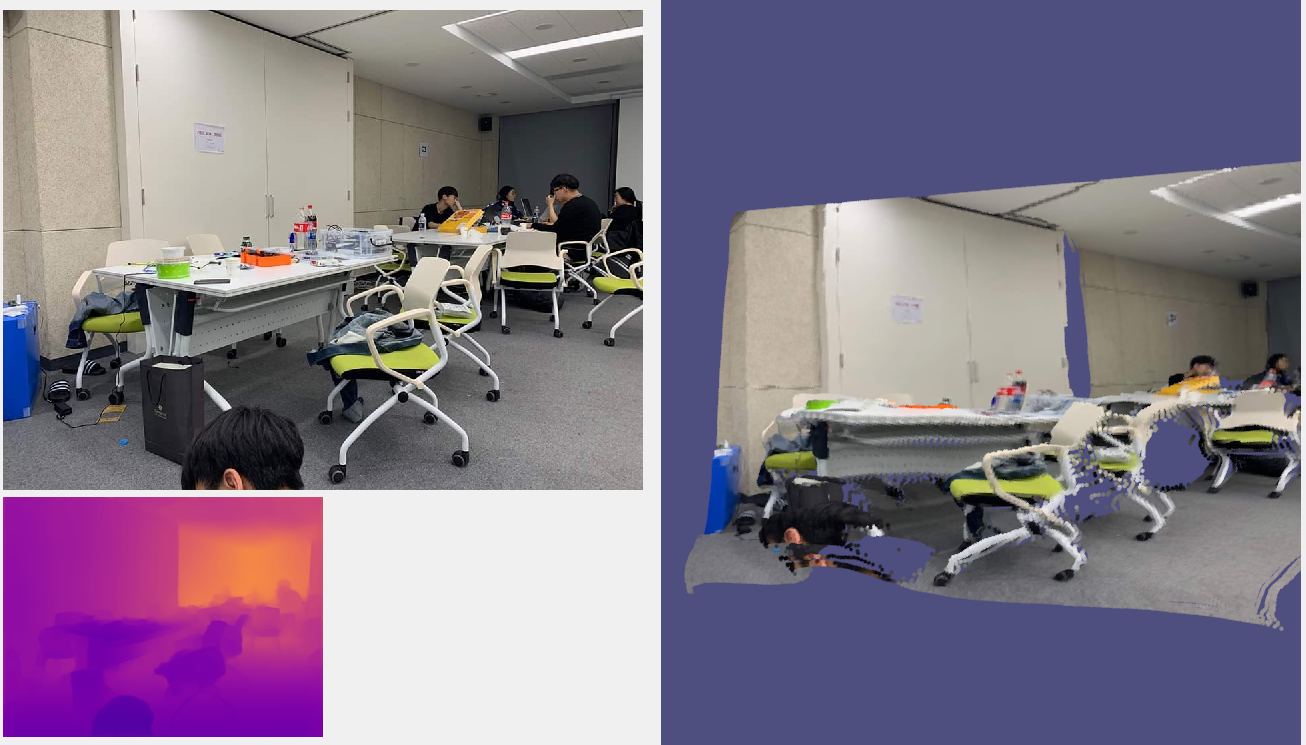
Depth Estimation

Inspiration
HIAB's HIVISION is product which helps truck driver who store logs, scraps, or recyclable paper. This product went well in other countries, but especially in Korea, it didn't go well. There are 3 main reason why this product failed.
1. Dizzyness
2. Strange sense of distance
3. Safety
.
.
To solve these problems, we thought of making autonomous crane system. As autonomous system can reduce human activities, we believe that our method can solve them
What it does
Our project can be divided by two parts. First is software part, which estimates depth. Depth Estimation was done by deep learning, based on paper "High Quality Monocular Depth Estimation via Transfer Learning". Second one is hardware part that copied crane system of HIAB HIVISION. This can move like real crane, without grappling part.
How we built it
We built our Depth Estimation software with Keras which has TensorFlow in backend. Additionally, we use opencv to deal with the images. PyQT was used in demo.
Crane is made by Arduino Uno and several 9G Servo motor. We built crane by using cardboard as main material. Interaction between servo motors make this look realistic.




Log in or sign up for Devpost to join the conversation.