-
-

MediSort
-

Our Team 1
-
Our Team 2
-

Our Mission
-
Our Mission
-

The Problem 1
-
The Problem 2
-
Our Solution
-
How it Works
-
Why its Innovative
-
Clinical Trial Impact
-
Results
-

-
-
-








We are Team MediSort!
Inspiration
We felt that medication safety was highly important, and that medication mix-up can ultimately cost lives. Those mix-ups could delay medical trials and endanger the your safety. So, we desire to create a solution that applies robotic and software precision to ensure accurate, timely, and traceable dispensing for prescribed medications.
What It Does
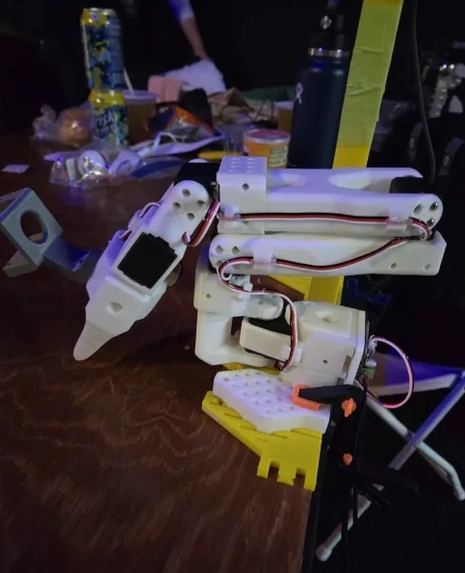
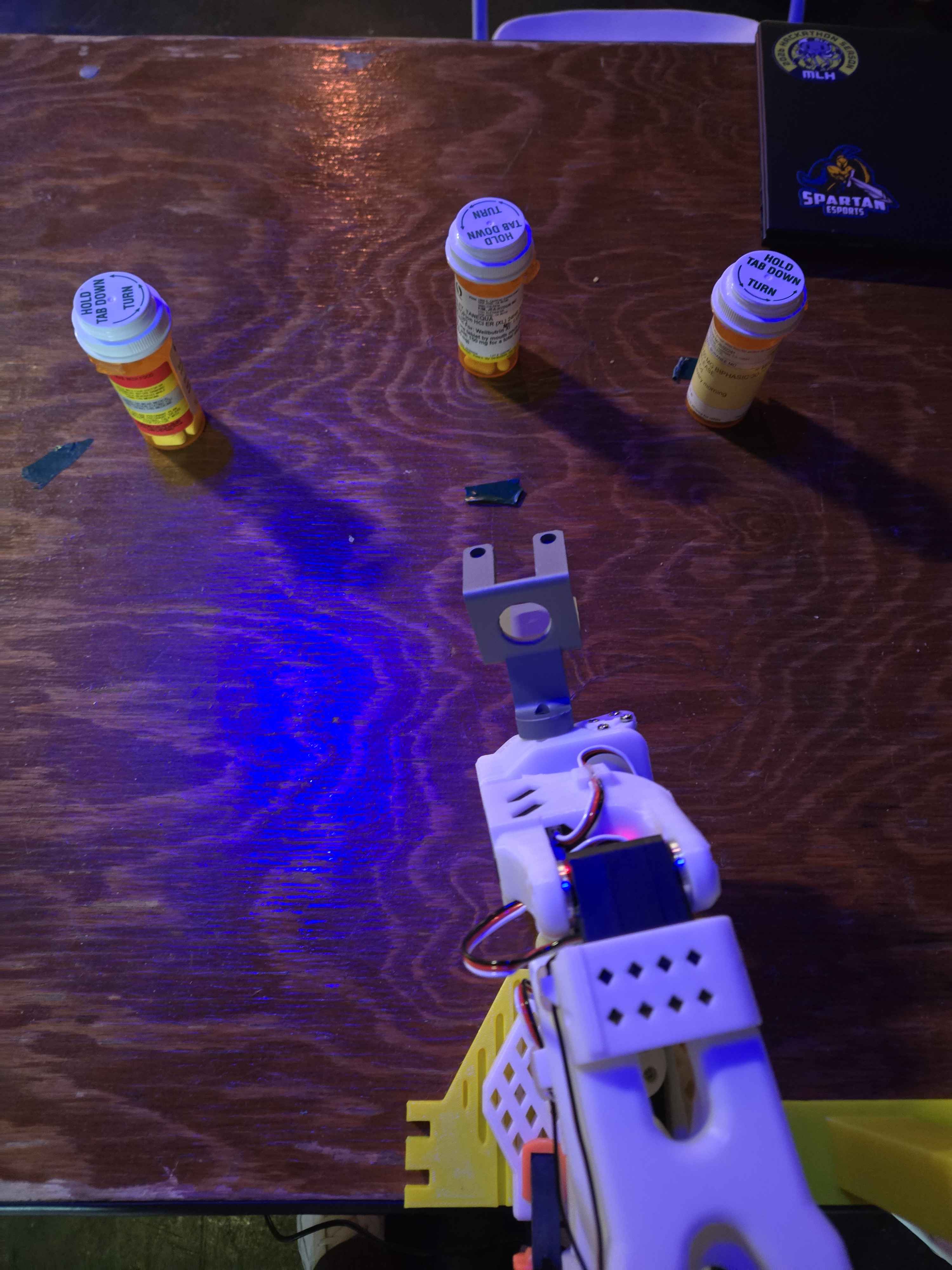
MediSort is a robotic medication dispensing assistant. It recognizes medicine bottles and dispenses them, and also ensures the medication is dispensed for the correct person. The system reduces risk and ensures patient compliance. It combines hardware with clinical protocol logic with traceable dispensing of medications.
How We Built It
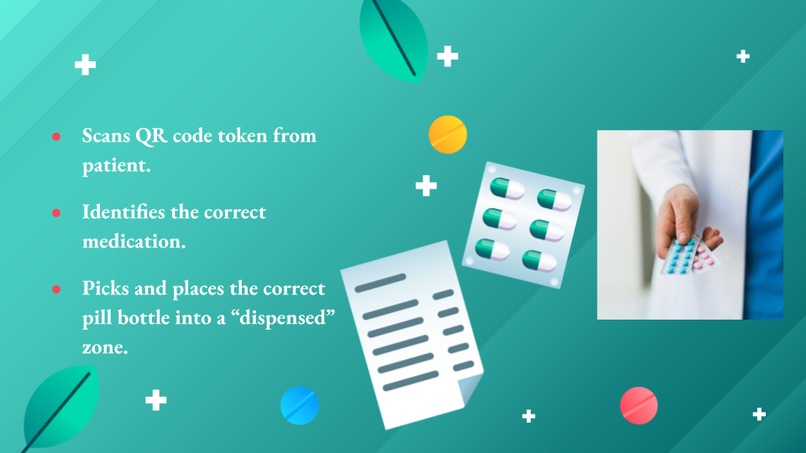
The core functionality involves scanning a QR code and selecting a pill bottle based on the information read from the QR code. It has logic to identify the correct medication based on the scan. A robot arm mechanism is used to pick and place the correct pill bottle into a "dispensed" zone. The QR codes hold patient metadata that is similar to clinical data, primarly patient name, dosage, medication, and time.
Challenges We Ran Into
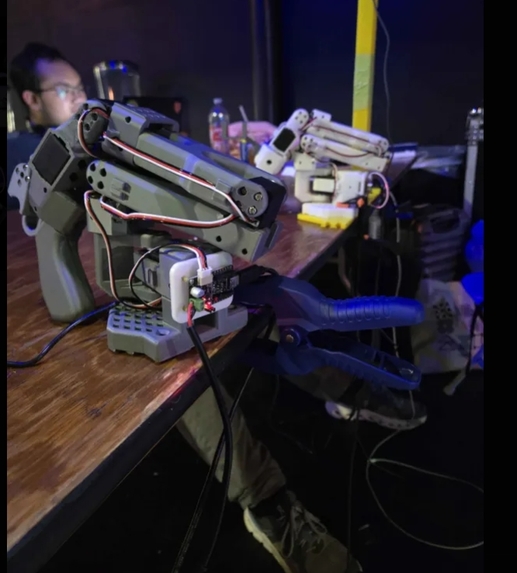
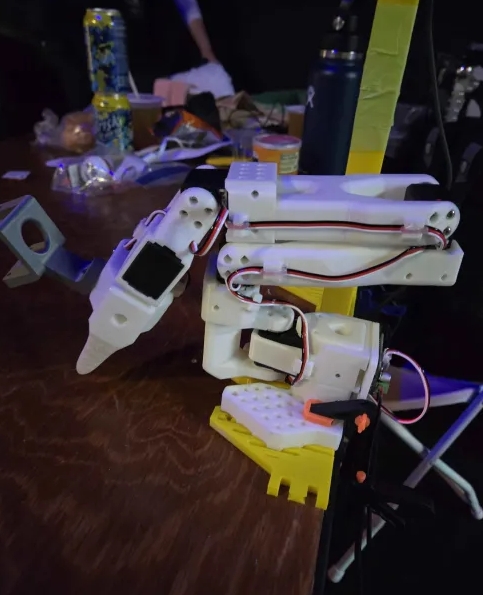
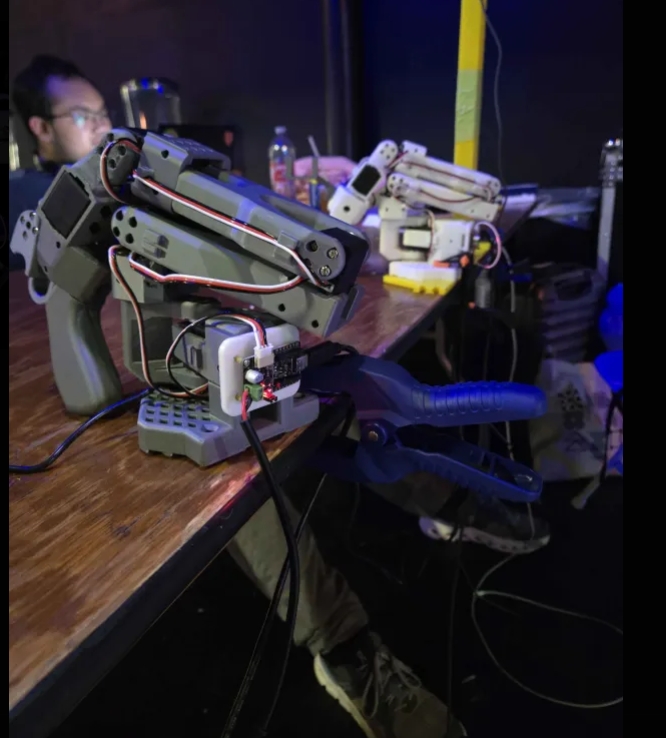
The biggest challenge we ran into was the logistical portion itself. We went through several objects to determine the best item to use to pick up and found that pill bottles worked best. We tried using colored blocks as stand-ins for pharmaceutical supplies, however, they were not available in any stores. After pivoting away from colored blocks, we decided to implement QR code scanning instead of color detection to base the robot movement logic. The scanning functionality failed to work with the webcam, even with a higher-quality one, so much so we had to use our phones to perform this task. The other major challenge we ran into was deciding on how to move the robot arm. Our first decision was to follow the lerobot documentation on Imitation Learning (IL). However, with the time constraints, camera issues, and the large movements that the arm was required to perform, it was not possible to create a decent-sized dataset to properly train on. Thus, we pivoted towards replay policies that can be called to replay one episode for a required arm position.
Accomplishments That We're Proud Of
The biggest thing we were proud of was actually getting something in for this hackathon. We spent so much time troubleshooting that we were worried we would not be able to present a viable demo. We went through a lot of trial-and-error on both the software and hardware.
What We Learned
We learned that turning clinical protocols into automation isn’t just “write the rules and go.” Real workflows have exceptions and messy edge cases, so we had to add checks, safety steps, and a way for people to step in when something felt off. Every click and movement needed a clear trail—who did what, when, and why—so our logging had to be solid and easy to audit. Working on the Arm movement of the SO-101 was its own puzzle: calibration, timing, repeatability, and recovery when things slip or land in errors. This wouldn't have been possible if our team has not been working together.
What's Next For MediSort
Scaling: Expand the system to support multiple patients and medications. User Interface: Add a UI dashboard for trial coordinators to easily monitor logs and deviations. Real-World Deployment: Explore partnerships for real-world trial simulation or hospital deployment.
Built With
- droidcam
- lerobot
- python






Log in or sign up for Devpost to join the conversation.