Inspiration
The inspiration for MAZE FOLLOWER came from a simple question: how can a robot make decisions using minimal information? Line-following robots are often treated as beginner projects, but when extended into maze-solving, they become a powerful demonstration of sensing, logic, and autonomy. We wanted to push beyond basic motion and build a system that could interpret paths, make choices at intersections, and adapt in real time.
What it does
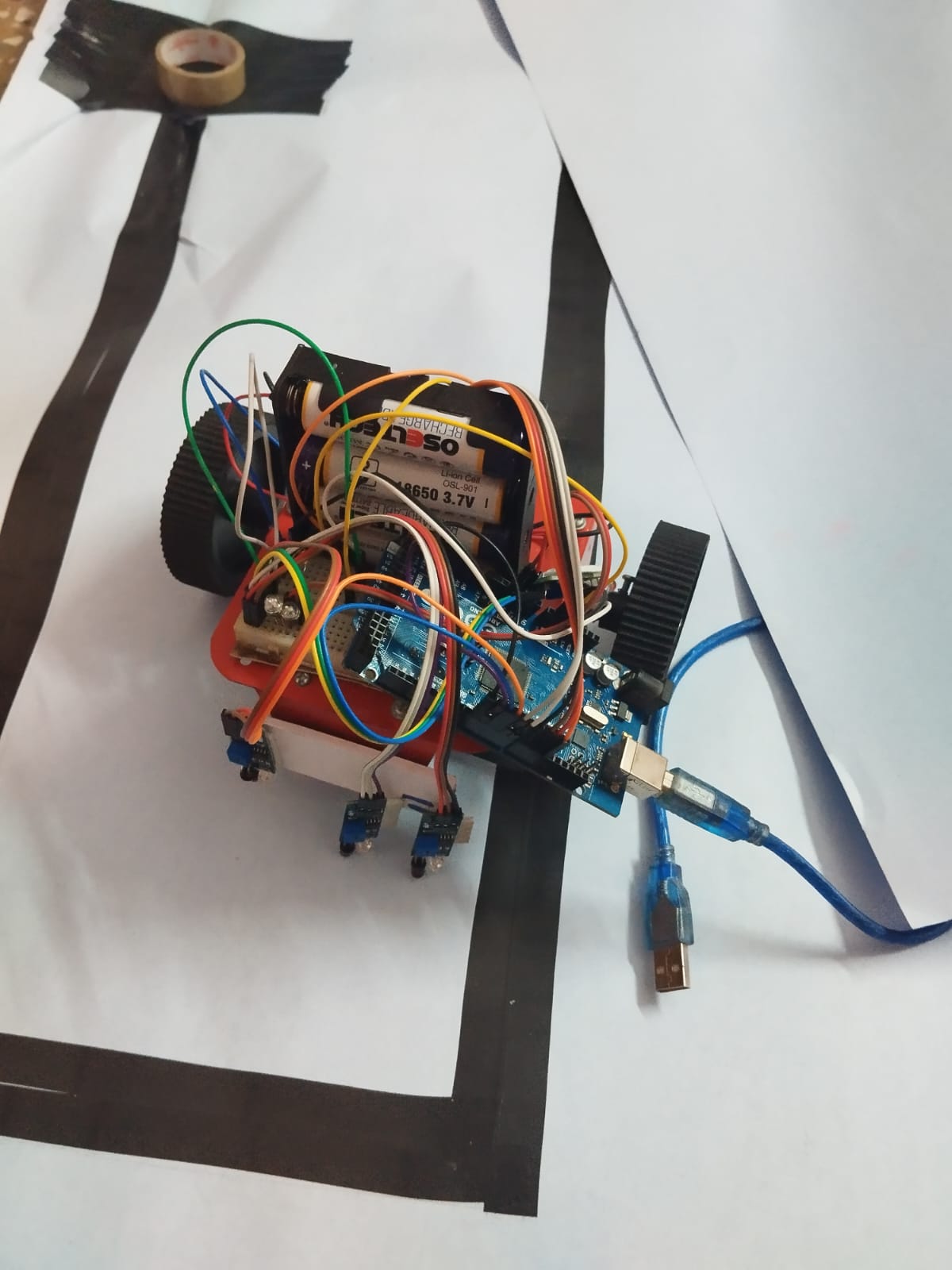
MAZE FOLLOWER is an autonomous robot that follows a line-based path and navigates through a maze without human intervention. Using IR sensors, it detects the line, identifies junctions such as left turns, right turns, T-intersections, and dead ends, and makes movement decisions based on predefined logic. The robot continuously corrects its path to stay aligned and progresses until it reaches the end of the maze.
How we built it
The robot was built using:
- An IR sensor array for line detection
- A microcontroller to process sensor data
- Motor drivers and DC motors for movement
- A chassis designed for stability and precision
Sensor readings are converted into digital/analog values, which are then used to control motor speed and direction. The core logic is based on conditional decision-making at intersections. Path correction is handled by adjusting motor speeds dynamically depending on sensor feedback.
Challenges we ran into
One of the main challenges was sensor noise and calibration. Small changes in lighting or surface reflectivity caused inconsistent readings. Another challenge was handling sharp turns and intersections without overshooting the line. Debugging real-world hardware logic was also difficult, as errors were not always reproducible like in simulations.
Accomplishments that we're proud of
- Successfully navigating a maze autonomously
- Reliable line detection after calibration
- Smooth turns and stable movement
- Building a working robotics system from scratch, both hardware and logic
What we learned
This project taught us:
- The importance of sensor calibration and testing
- How real-world constraints differ from theoretical logic
- Practical embedded programming and motor control
- Debugging hardware requires patience, iteration, and observation
What's next for MAZE FOLLOWER
Future improvements include:
- Implementing maze-solving algorithms like Left-Hand Rule or Flood Fill
- Adding memory to store and optimize paths
- Using PID control for smoother and faster line following
- Integrating wireless monitoring or visualization
MAZE FOLLOWER is just the beginning—this project lays the foundation for more advanced autonomous robotics systems.

Log in or sign up for Devpost to join the conversation.