-
-
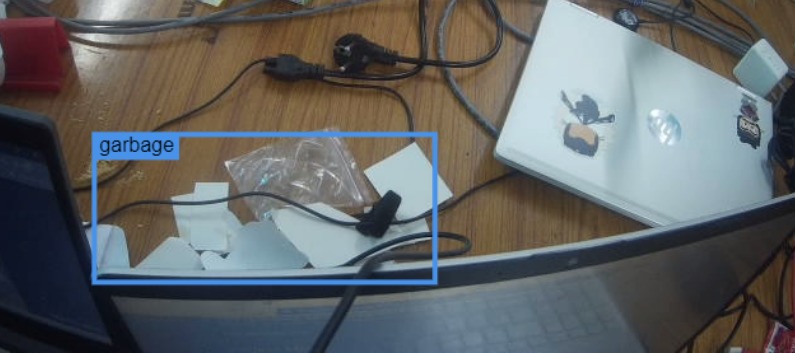
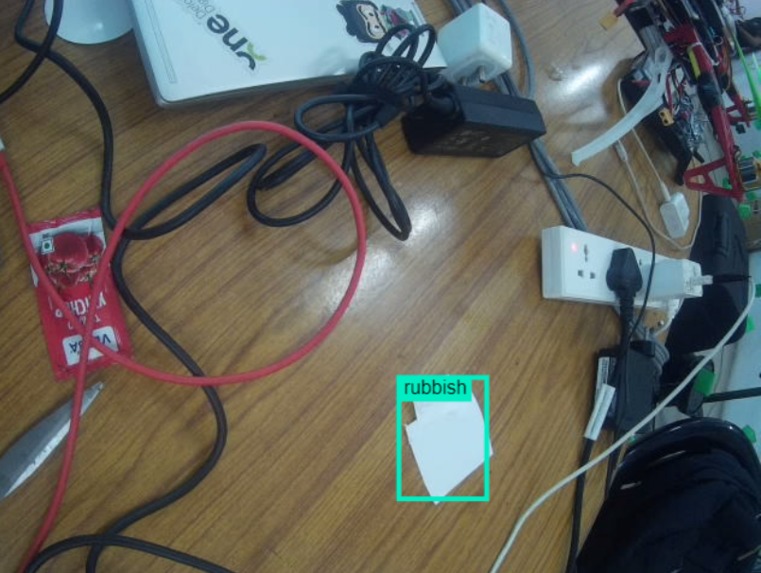
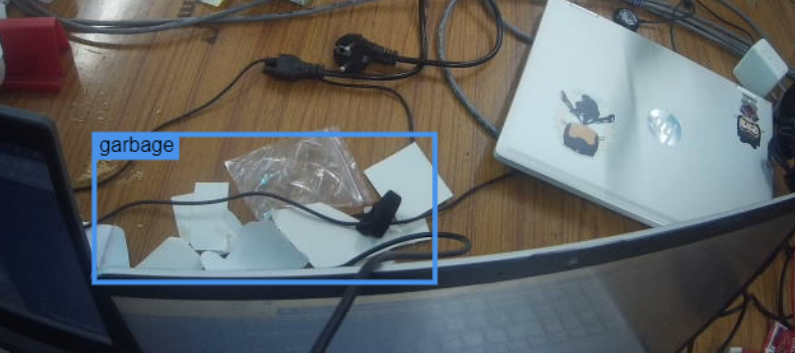
Our machine learning model can identify garbage
-
-

three of our team members setting up the drone


Inspiration
During our trip to George Everest Peak, we noticed garbage lying around. Given the region's remoteness, regular cleanups were impractical. To address this, we proposed Marutsakha to detect and locate garbage, enabling targeted cleanups and preserving the peak's natural beauty.
What it does
Marutsakha is a unmanned ariel drone integrated with a trained ML model that can detect garbage. Marutsakha is equipped with sensors including gps and a camera. Our idea is to set a path of the drone in inacessible areas where manual reach is fuel consuming. This UAV would stream video and detect the garbage locations in path and based on drone's current position would generate a geoheatmap that can be helpful to easily map out the garbage accumulations.
How we built it
Software Part -- Firstly we researched about the feasiability of this project -- Then, we trained a machine learning model over 10k images using roboflow which works on YOLOv7 model using Deep CNN Algorithm -- Then we setup a mongodb atlas to post and fetch nosql data (containing geolocation) and generated api key to do the same in python -- Then we created a script to stream and detect garbage in a frame. -- Then we wrote a script to fetch from pyMavLink API based Library to get the Geolocation (Longitude, Latitude) of the drone where it detects the garbage through the model and inserts data -- We also created a stamen-terrain heatmap using plotly express. --This heatmap plotted a graph by intensity of garbage accumulation.
Hardware Part -- 1. Fesiable Frame size was decided -- 2. UAV parts were selected on the basis of frame size including BLDC Motor, ESC, Flight Controller Pixhawk, GPS M8, Telementary Device, FSI10B Radio Receiver, 20maH Li-po 3S Battery, Camera
Challenges we ran into
- Due to limited resources and time constraint we have trained a decent model for showcasing the particular usecase.
- We managed to get the drone parts like video streaming camera in a limited monetary support.
- Linking the mavlink to get raw gps data from drone in python was a hectic task.
Accomplishments that we're proud of
We're tackling the problem of garbage accumulation in inaccessible areas where an unmanned arial object is effective to reach. We are proud that we're solving an unnoticed issue where currently no one is working and is a necessary issue to be addressed.
What we learned
Team Work - Our team consists of people with different tech stacks working together which includes Backend development, IoT, Frontend and Designing. Experience - We learned project implementation, presentation, got guidance and indeed fun moments. Networking - It is really good to connect with people from all over India and get to connect with each other.
What's next for Marutsakha
We have planned to patent Marutsakha and generate a royality from licensing. We will customize Marutsakha based on different use cases.
Built With
- beautiful-soup
- iot
- javascript
- leaflet.js
- machine-learning
- orkes
- plotly.express
- postman
- python
- restapi
- roboflow







Log in or sign up for Devpost to join the conversation.