-
-
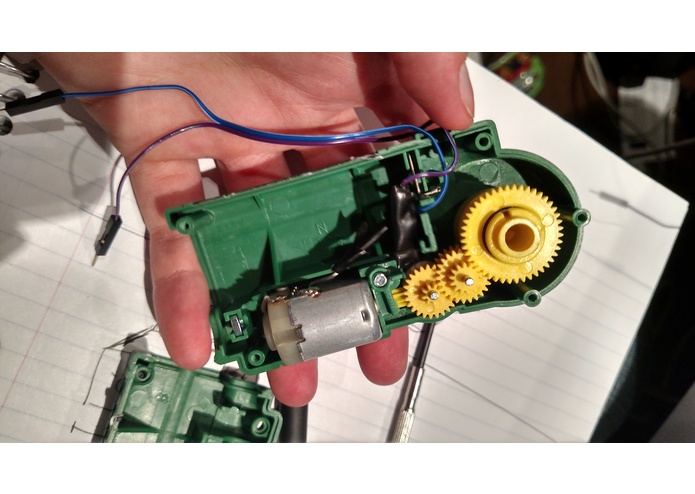
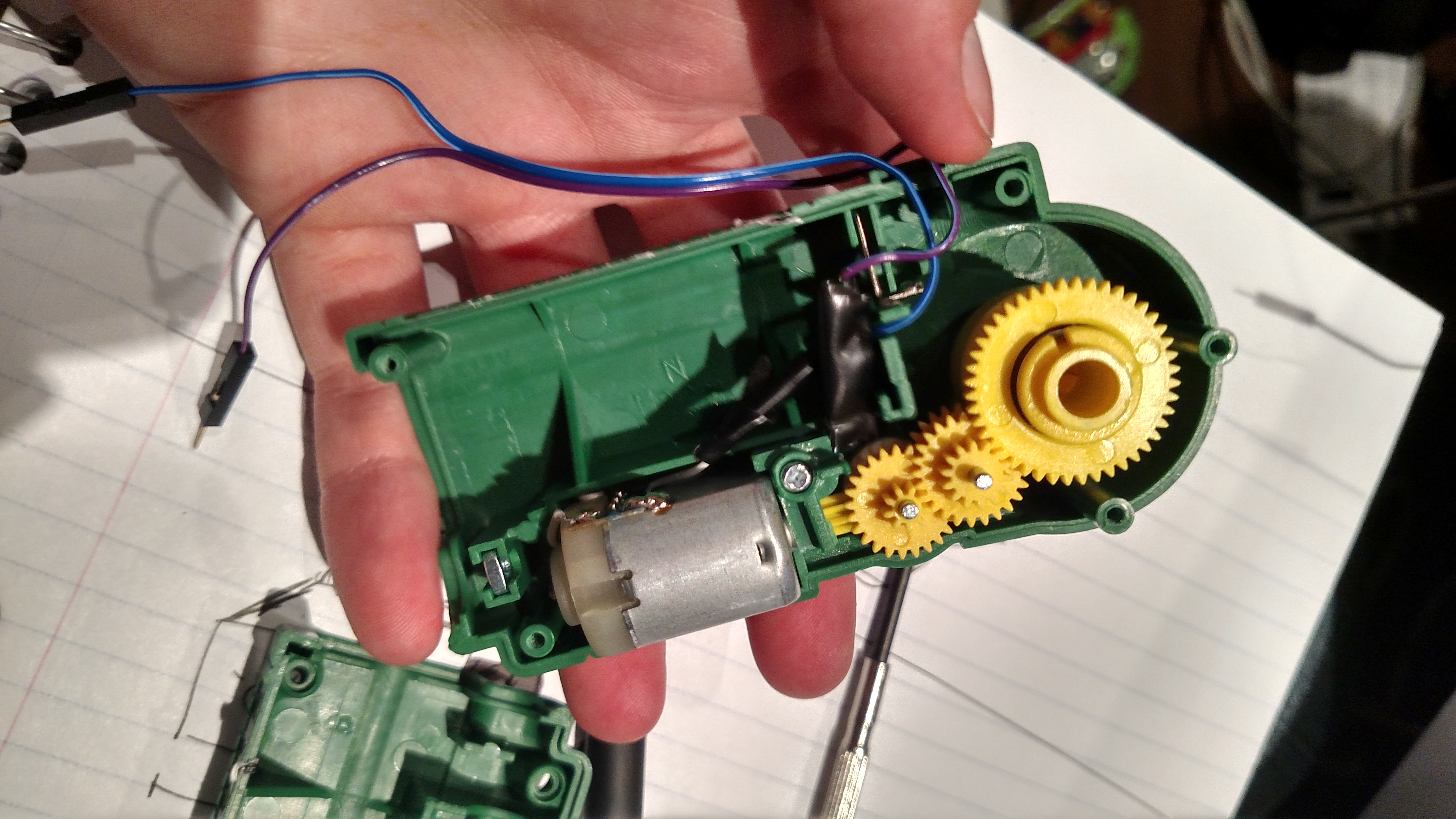
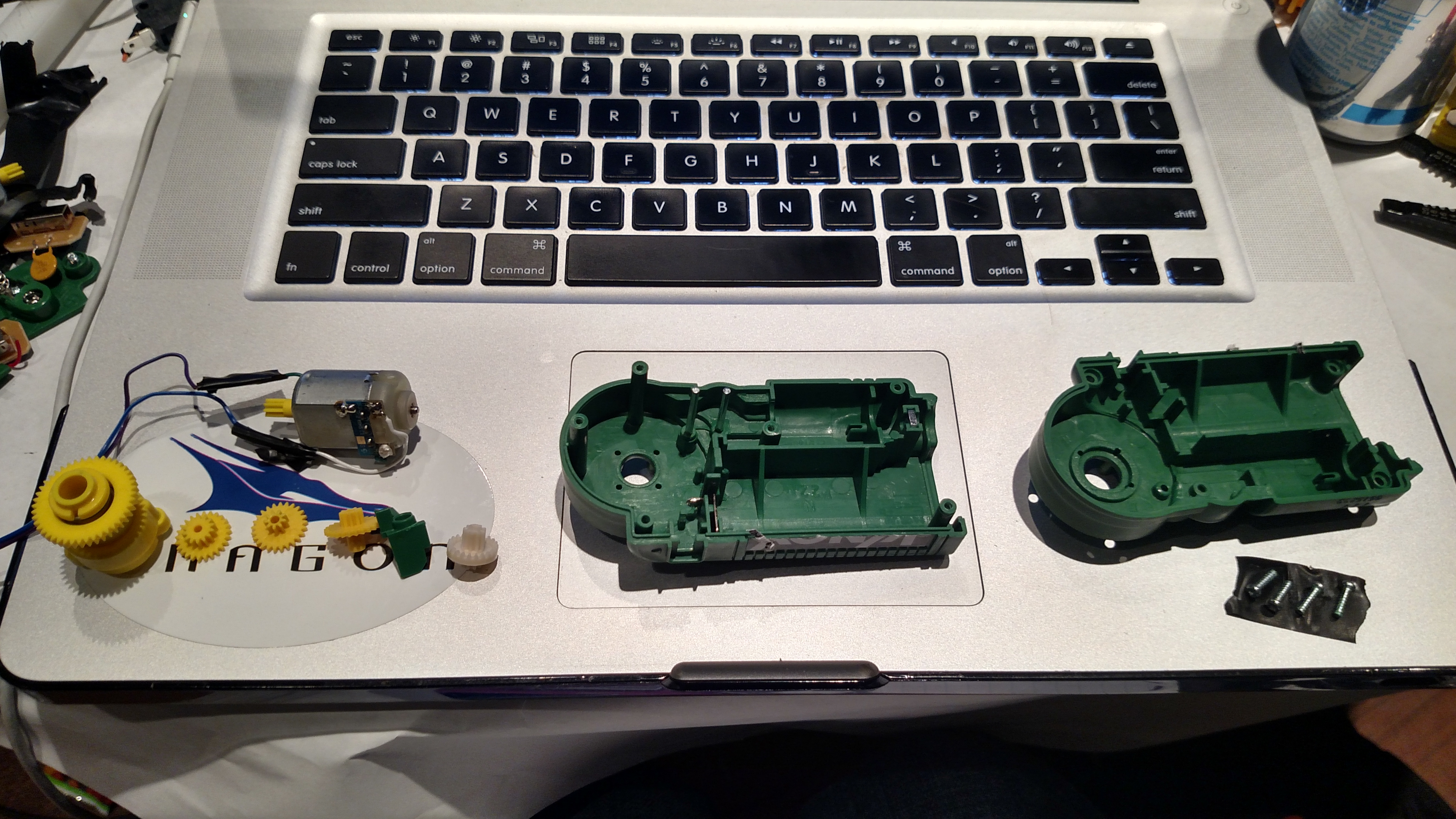
K'nex motor, mid-cannibalization. We ripped out the battery terminals and soldered new leads onto the motors so we can plug 'n play.
-
Entirely cannibalized K'nex motor! Turns out these guys have a decent amount of torque, so we're using them for all our actuators.
-
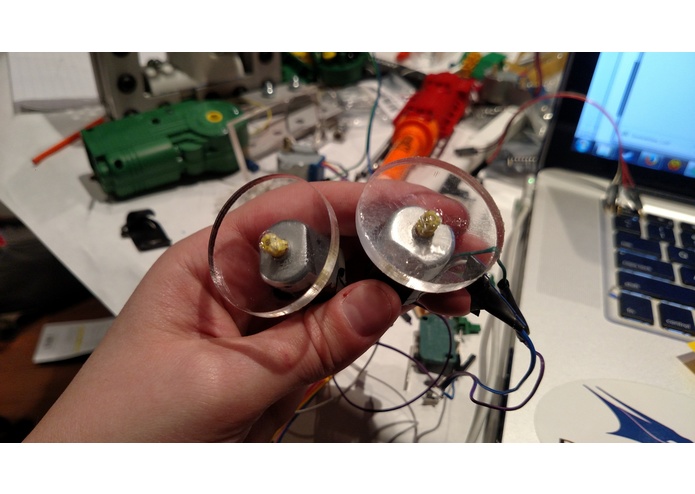
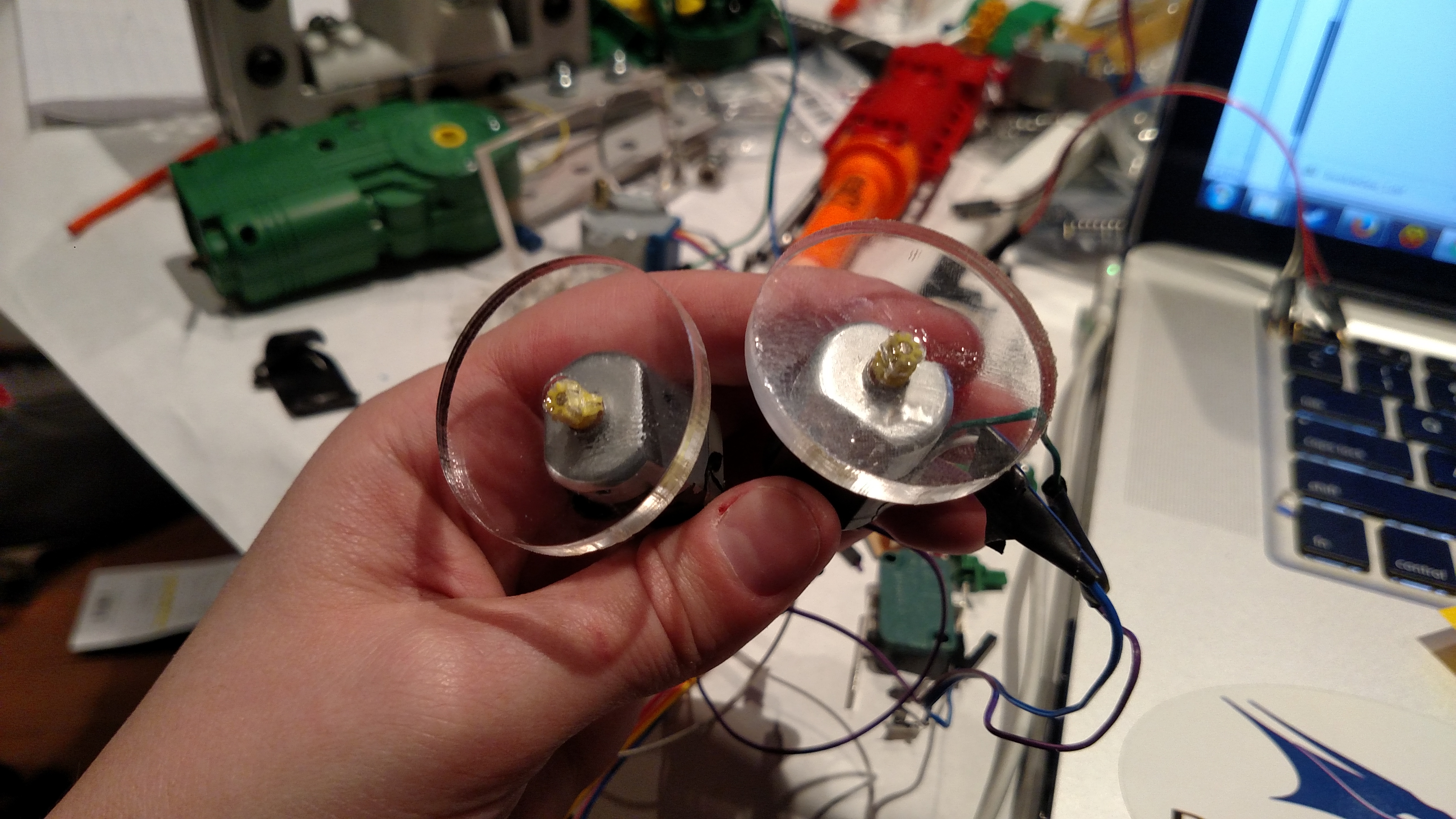
Press fitting flywheels to ground-down pinion gears. Direct drive? Direct drive. What could possibly go wrong?
-
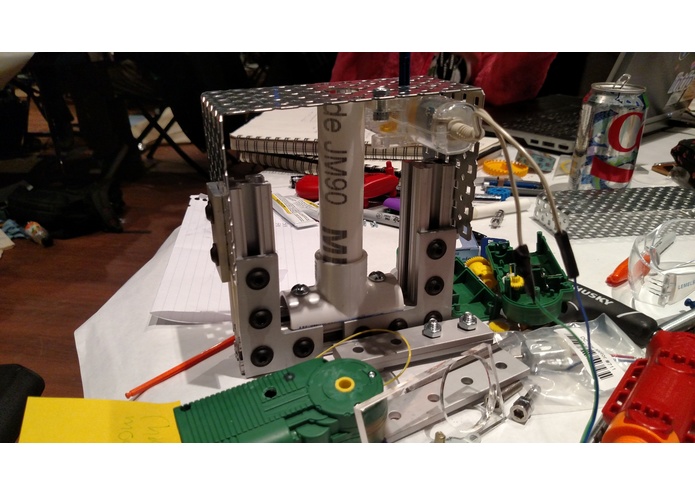
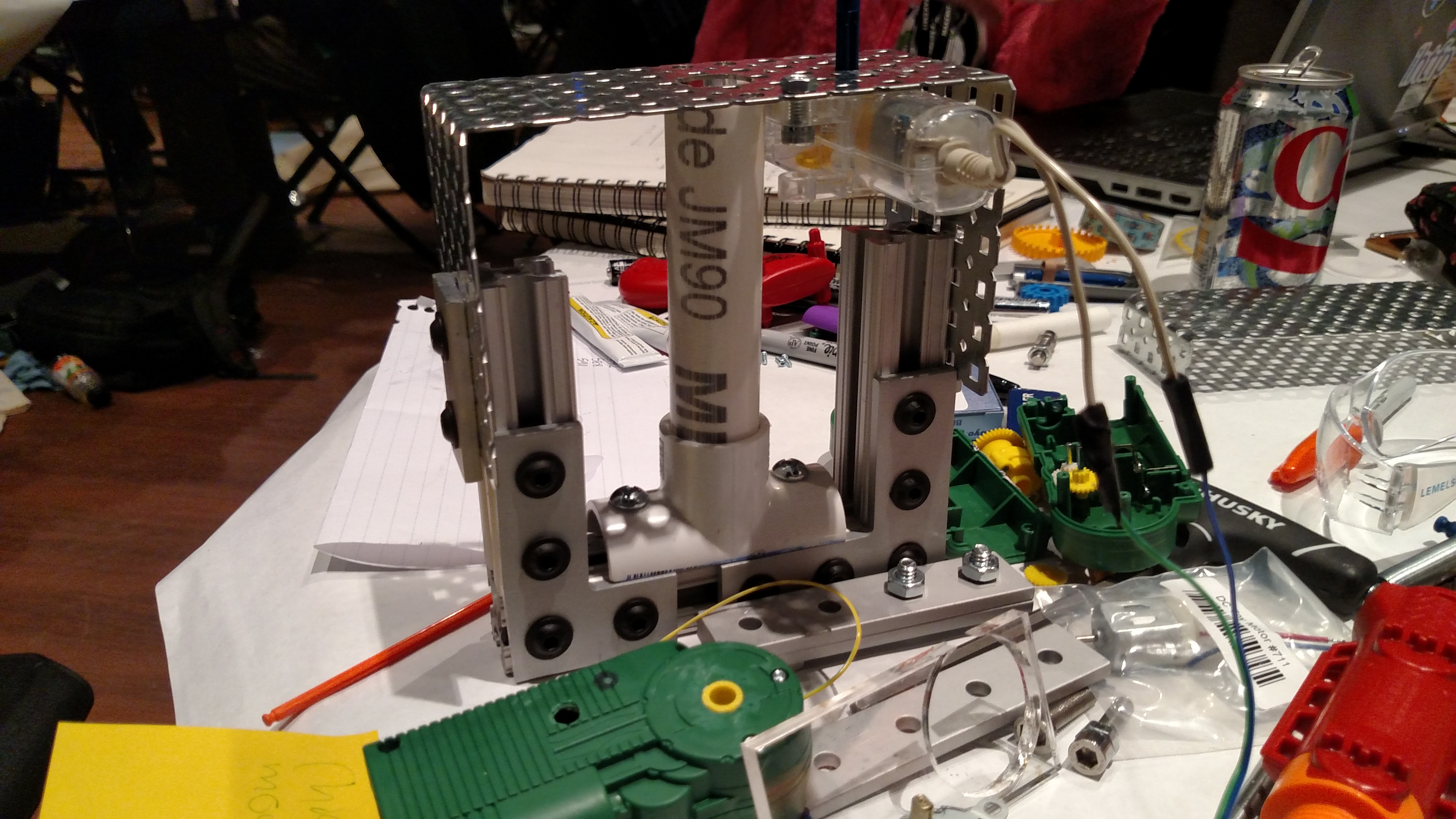
The lower stage, mid-assembly. The clear motor + gearbox controls panning action. Tilt will come from a separate motor.
-
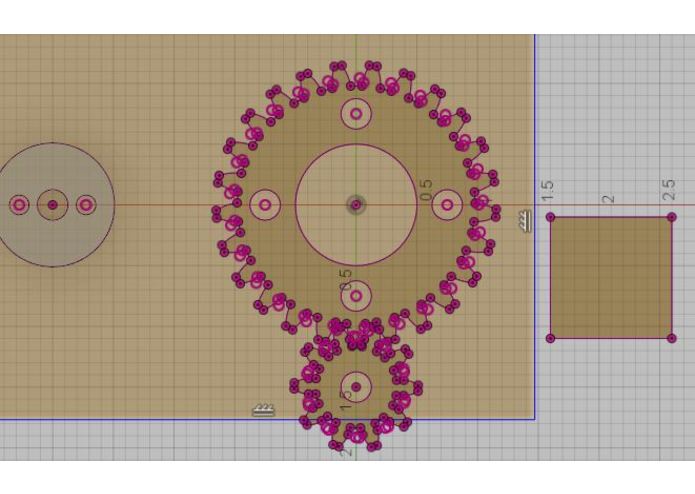
Screenshot of Gear Creation!
Inspiration
Some of us play way too much Team Fortress 2 and have bonded too warmly to the Engineer, but mostly to his robotic sentry turret.
What it does
It spins, locks on to people, and then shoots marshmallows at them.
How we built it
80/20, pvc, delrin, vex grid stock, and some other nice materials. Also a Kinect, because tracking humans is hard.
Challenges we ran into
Motors come in many flavors, from Wimpy to Slightly Less Wimpy. So we could not pull back the original nerf gun we were planning on using. Luckily, the Wimpy and Slightly Less Wimpy motors have alternate names: Very Speedy and Slightly Less Very Speedy. So we're using those to run some flywheels, like a baseball pitching machine.
The great part about this is provided it doesn't jam (which it might) the only two options are a) marshmallows go flying at the intended target, or b) marshmallows sort of just dispense from the front of the robot like an awkward marshmallow vending machine. We think these both sound great.
Accomplishments that we're proud of
[From the One Who Spend Too Long with the Kinect] I sort of prodded the Skeleton basic code until it send x-coordinates to the arduino, where proportional control-type things happened. Poking C# was interesting, it's a lot like Java. I also installed Visual Studio.
I'm also pretty proud of Lauren, who cannibalized three (four?) K'nex motors to get us the torque to move the whole turret and then cannibalized the cannibalized ones to get us the rpm's to run the flywheels.
(Lauren) D'aww, thanks. It was pretty fun, except for the part where I had to file down the pinion gears so we could press fit them into the flywheels. I'm a little concerned that there won't be enough torque - although mini marshmallows are tiny and very squishy, there's always a chance they'll bind up the wheels just enough to cause a jam. We'll find out once our laser cutter job is finished and we can assemble the gearbox.
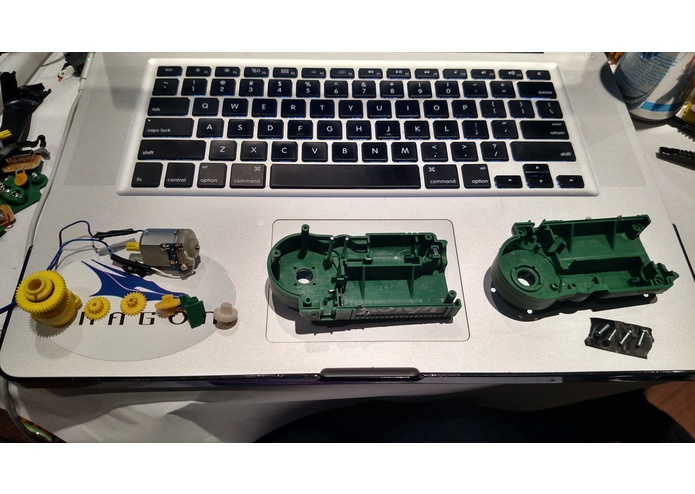
(Kate) Thanks to the joy of expired SolidWorks activation codes, I learned to use AutoDesk Fusion 360 today. Made some snazzy gears. That didn't end up being laser cut by MakeMIT. Not that I'm bitter. Not at all. Also, I made up for lost childhood by playing with k'nex for the first time.
(Paul is not here, it's the Kinect Minion again) Paul did lots of mechanical things I do not fully understand, but they are beautiful and indestructible. The main pivot turns like a dream and stands upright with very little base width. ++ Paul, you go Paul.
What we learned
- C# is a lot like Java.
- K'nex motors, although they look like dinky toys, are actually pretty powerful.
- PVC and cylindrical Delrin make a really nice sleeve bearing.
- Everything always takes far, far longer than you think it will. Always. (Will we finish? We don't know! We certainly hope so, because we've been looking forward to pegging random people with high-speed sugary projectiles all day.)
- Use the lasercutter on your hall.
What's next for Marshmallow Sentry Turret
Probably either sadness or standing guard outside somebody's room warding off cats. Or maybe tracking specific body parts so we can go for the head shot! [Note: we currently aim for the head, we just only care about x-axis. Working on it.]
Built With
- 80/20
- acrylic
- arduino
- hope
- microsoft-kinect
- pvc

Log in or sign up for Devpost to join the conversation.