-

MarioTeam34
Team 34
Inspiration
Mario is a friendly robot that is designed to de-stress students through their strenuous university years. The calamity of sprawled notes, open books, and spilled coffee is something that affects hundreds of students, especially during exam season and is the inspiration for our project.
What it does
At its core, Mario is a self-stabilizing coffee holder, providing energy and nutrition to sleep-deprived students while preventing spilled drinks. Mario accomplishes this by using a gyroscope and accelerometer paired with the principles of PID control to adjust the motor torque underneath the coffee platform, accordingly.
Mario has other built-in functions designed to make it a more intractable and fun robot. It includes a speaker to play music, such as the Mario theme song. Nothing warms the heart of a student more than nostalgic tunes from times spent not studying. It also has built-in Bluetooth allowing it to be remotely controlled by a phone, tablet, or other compatible devices.
How we built it
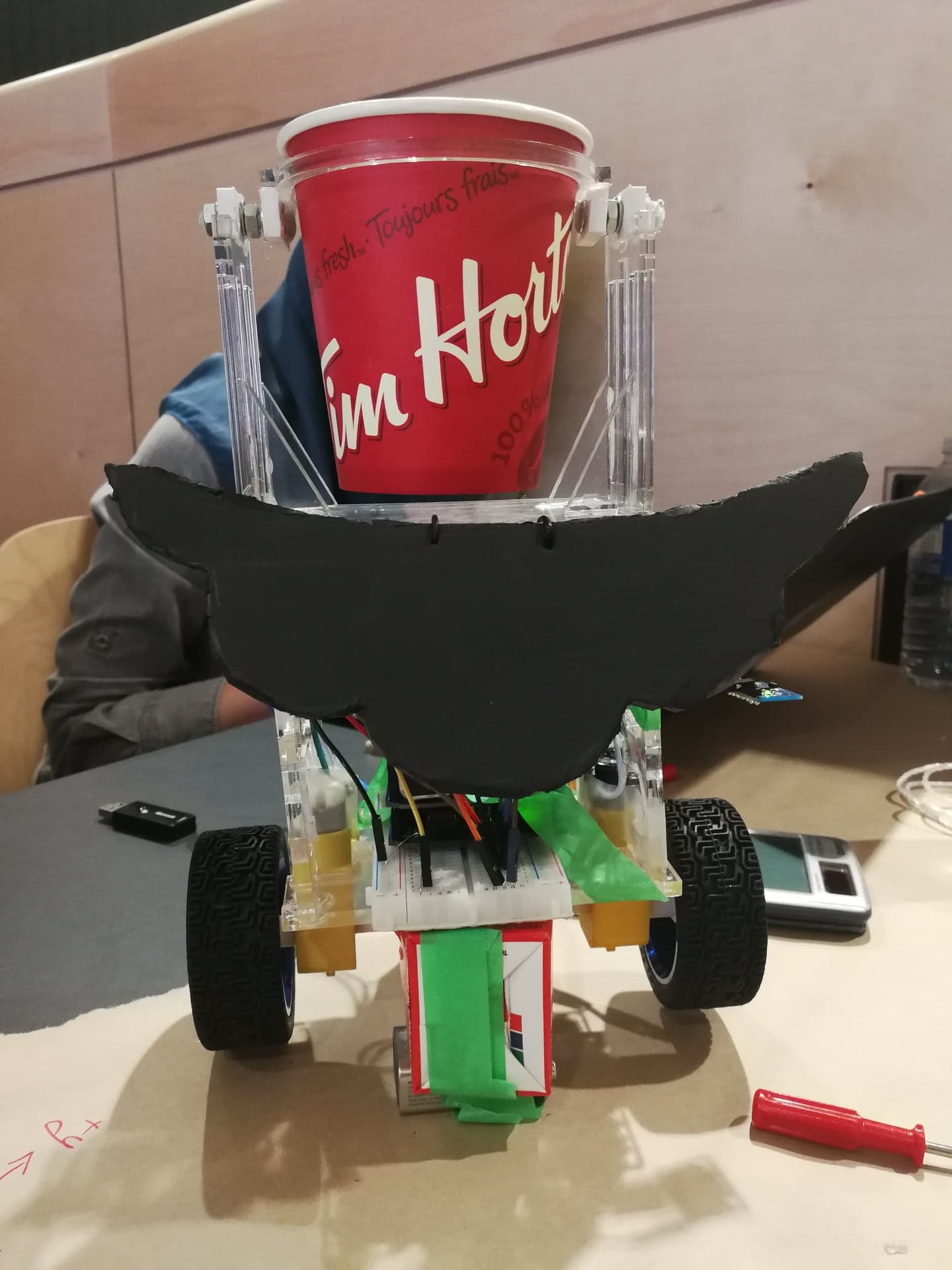
As illustrated in the attached diagram, Mario can be deconstructed into 3 physical stages:
1) The Motor assembly This is located at the bottom of the platform, allowing the robot to move, and applying the necessary torque for stabilization. It is attached to the rest of the robot rigidly by a hot glue gun.
2) The Arduino circuitry complex This is where the electrical hardware is integrated with the Arduino code. It sits directly in the middle of Mario to minimize wiring to the motor and also to concentrate the center of mass of the robot.
3) The Coffee Cup Holder This is the throne of the prized possession: The Coffee Cup. It is hinged to the platform below to allow for relative motion.
Challenges we ran into
Tuning of the PID parameters for our robot was the most challenging aspect of our design. Because of the limited
Accomplishments that we're proud of
Our group is proud of the implementation of a PID control, something that is very popular in industry and that we are learning in our coursework this term!
We are also proud of the finished mechanical structure, and the aesthetical bracing structure and colour coordination. We believe that having an aesthetically appealing robot contributes greatly to its core function of destressing students.
What we learned
Through our challenges, our group has learned how efficient CAD can streamline the design process. We have also expanded our knowledge of PID control.
What's next for Mario - The Self Stabilizing Caffeinator
Fixing Bluetooth control is an important next step for Mario. So is adding additional PID tuning to account for steeper and bumpier terrain.
Built With
- arduino
- pid

Log in or sign up for Devpost to join the conversation.