-
-
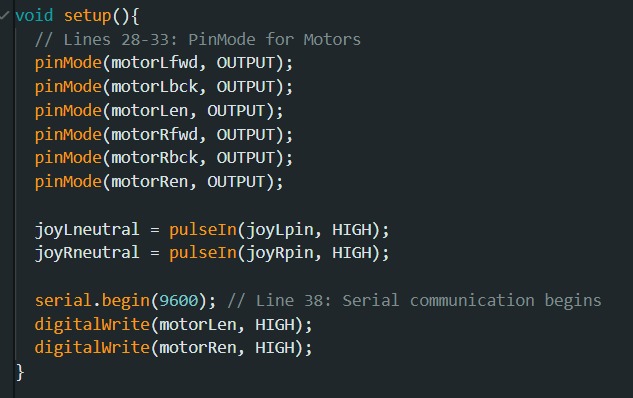
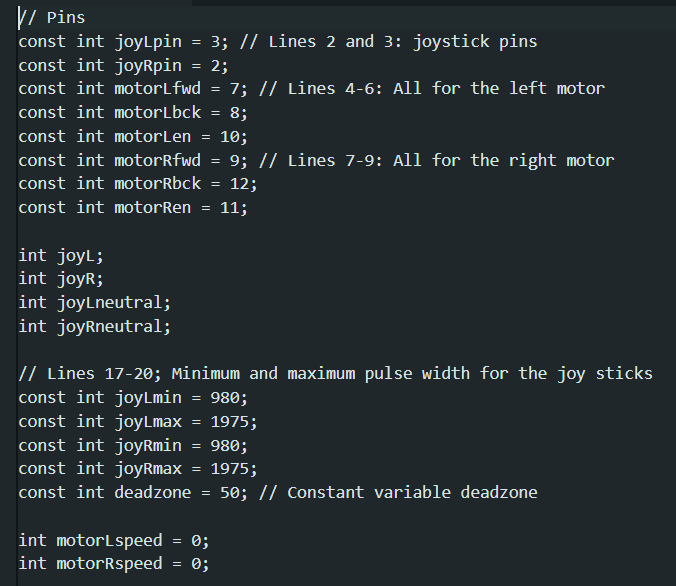
Code
-
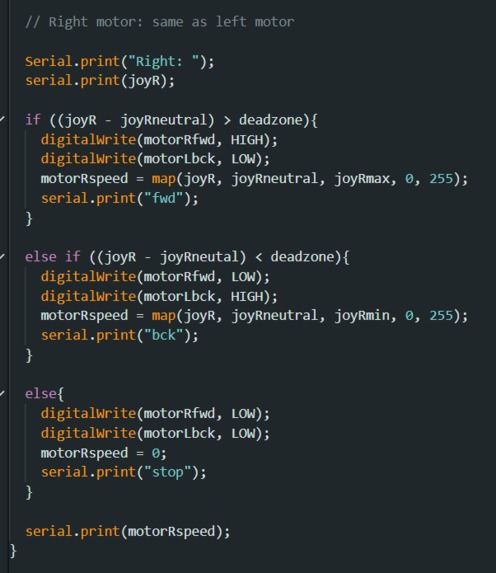
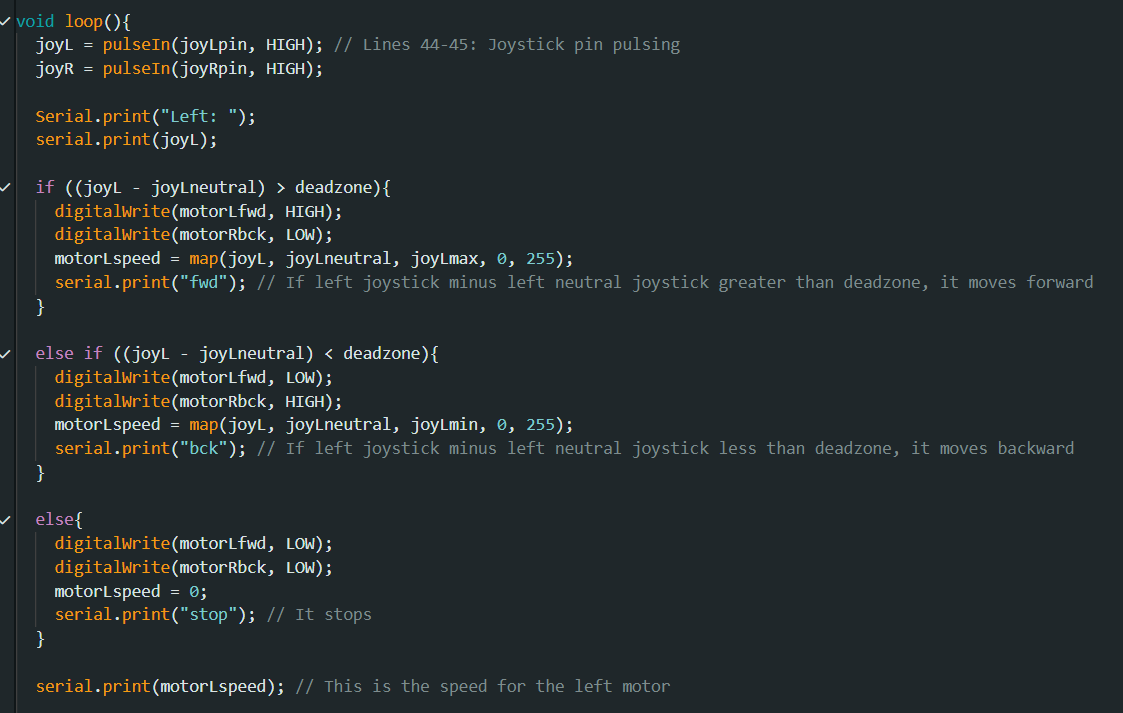
Code
-
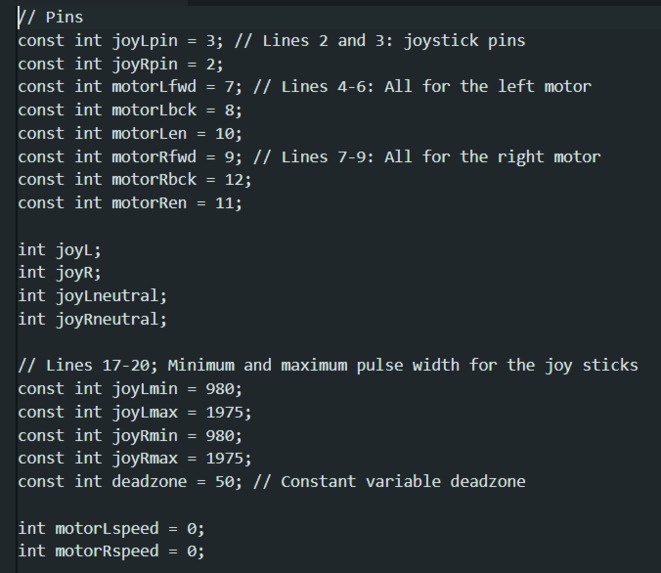
Code
-
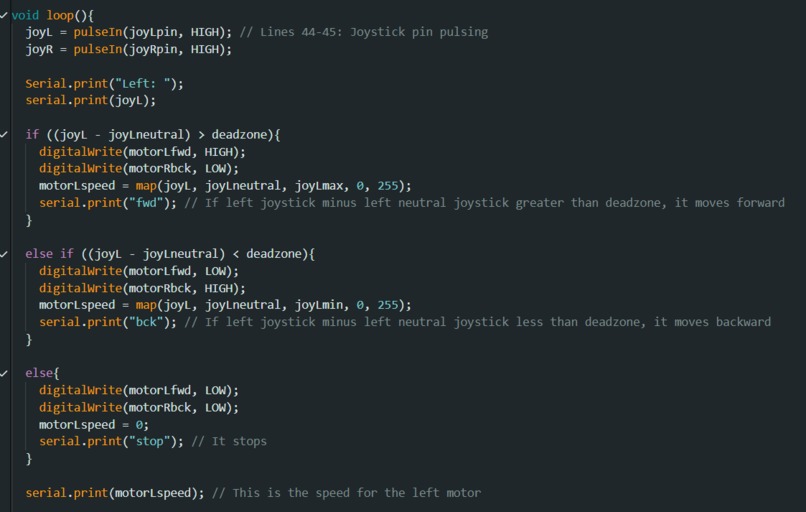
Code
-
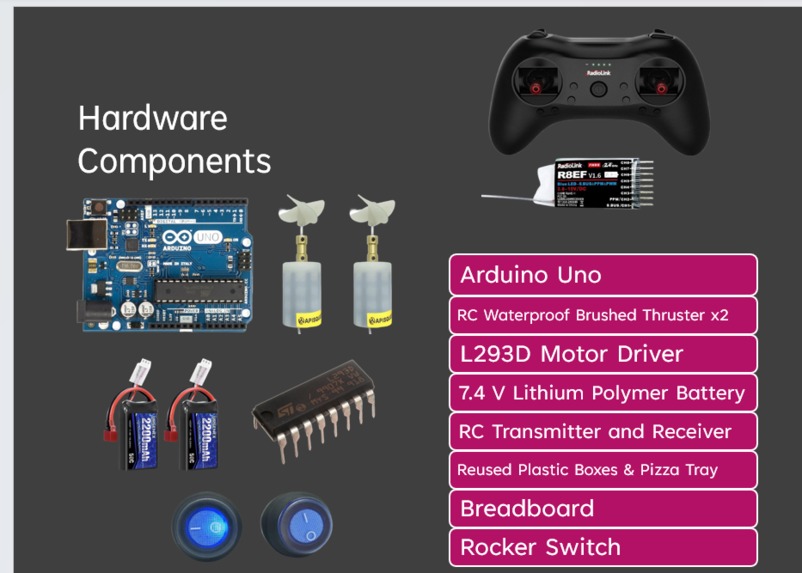
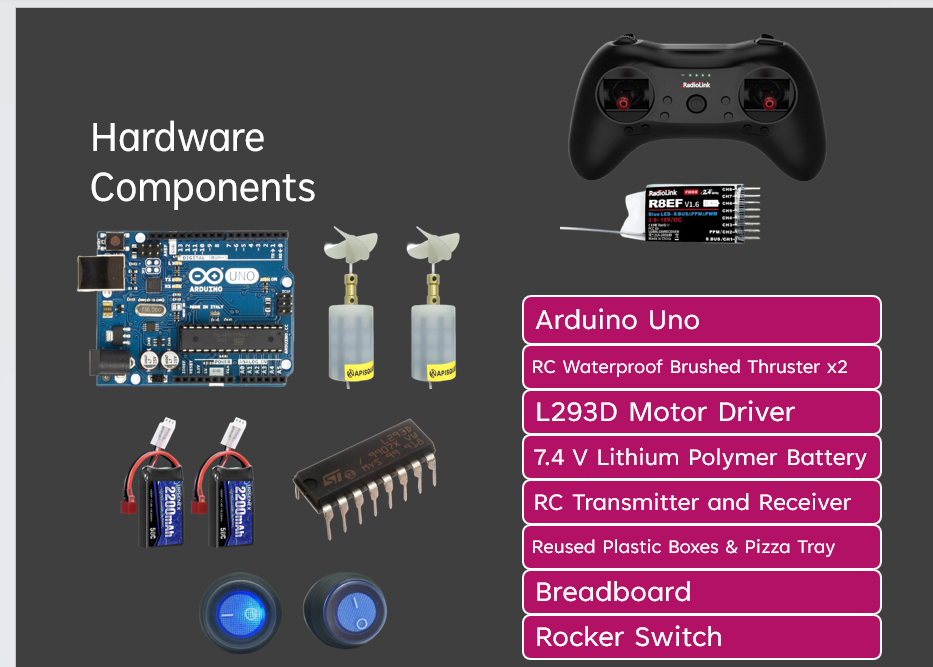
Hardware Components
-
RC boat
-

RC boat

Inspiration
I was inspired to make this project because I often see plastic and garbage floating in rivers and lakes. This hurts fish, turtles, and other sea animals. I wanted to create something simple that could help clean the water. That’s why I decided to build a small boat called AquaPi that can be controlled with a remote to collect marine debris.
What it does
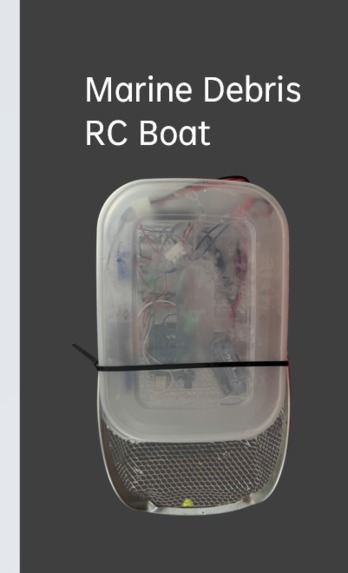
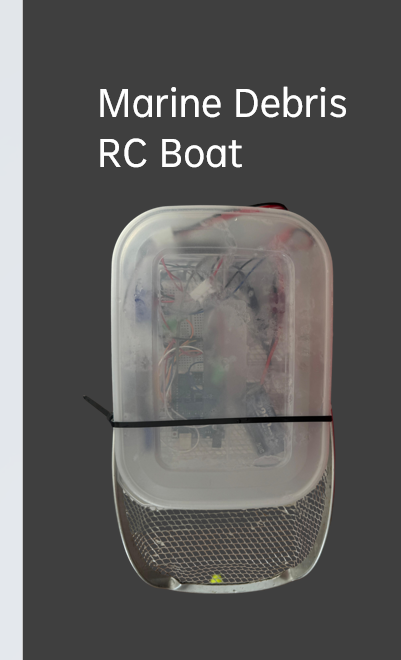
AquaPi is a small remote-controlled Arduino boat that moves on water and collects floating debris. It has a scoop in the front to push trash into one place so it can be removed from the water.
How we built it
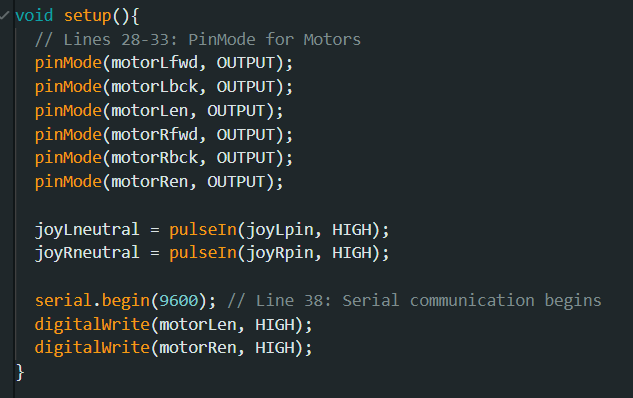
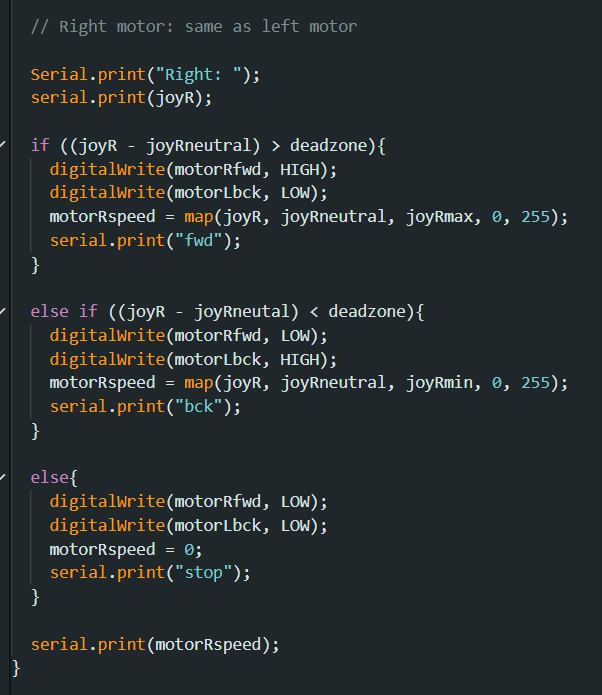
Used an Arduino Uno, motors, a motor driver, a battery pack, and a remote control. Made a lightweight boat body so it can float. The motors were connected to the Arduino to move the boat forward, backward, left, and right. A scoop was added in the front to collect debris. The Arduino was programmed to respond to signals from the remote.
Challenges we ran into
Keeping the electronics safe from water splashes. Making the boat stable while carrying the scoop. The remote sometimes had a short range, so we had to test carefully. Managing the battery so it was light but still powerful.
Accomplishments that we're proud of
Successfully building a working boat that can collect debris. Learning how to control motors with Arduino. Seeing the boat move in the water using just a remote control. Turning an idea about helping the environment into a real prototype.
What we learned
How to use Arduino to control motors and servos. How remote control signals are used to move things. The importance of testing and improving designs. That even a small project can help solve a big problem like marine pollution.
What's next for Marine Debris Project-AquaPi
Add sensors to detect trash automatically. Improve waterproofing for the electronics. Use solar panels so the boat can run longer. Make the scoop bigger and stronger to collect more debris. Work on making the boat more stable for real-life use.











Log in or sign up for Devpost to join the conversation.