Inspiration
We wanted to build a robot that could autonomously map a room.
What it does
We created a robot that can map the room and plot the coordinates on graph.
How we built it
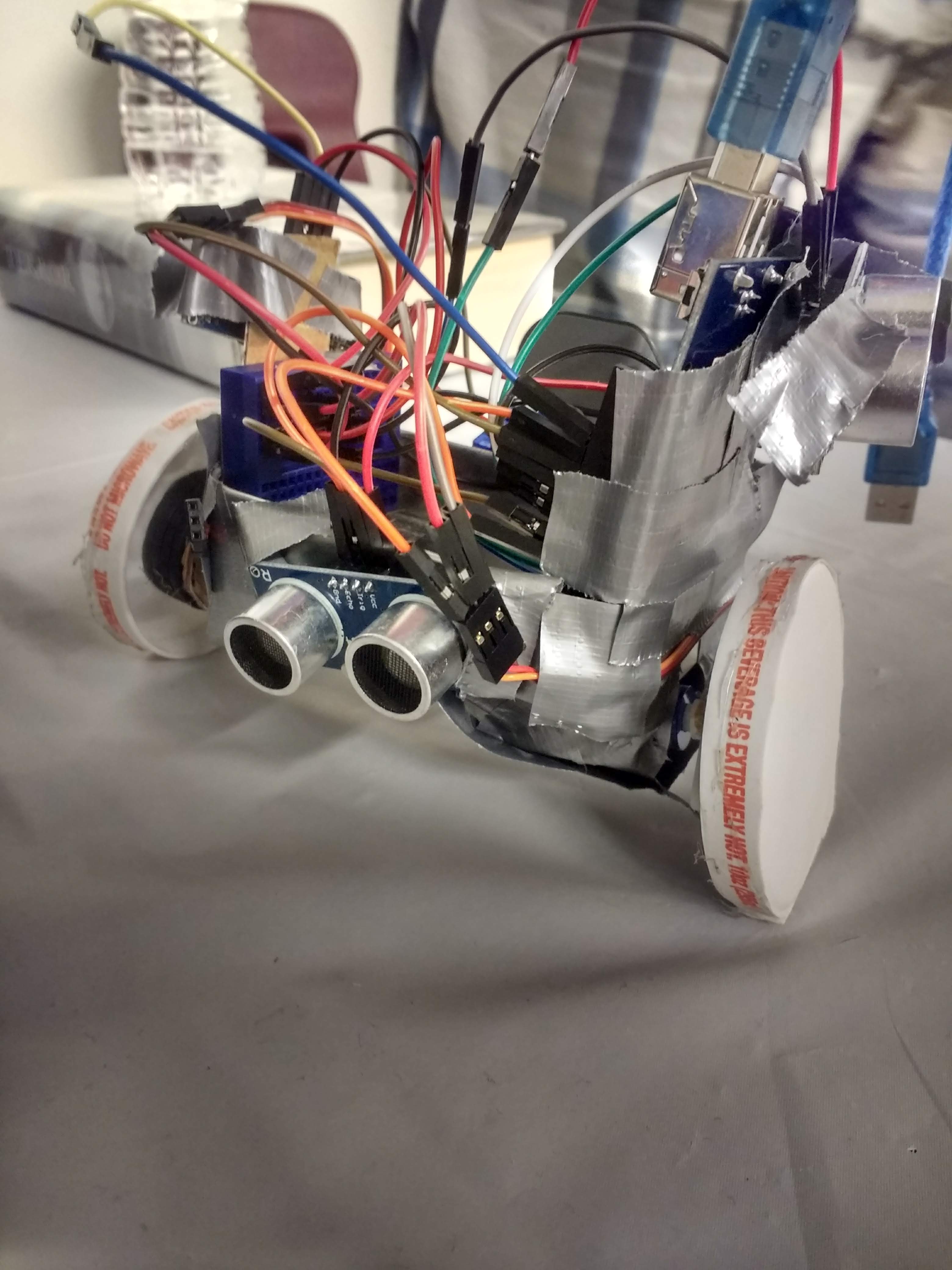
We built it using a cardboard robot that has a dragonboard and ardunio mounted on it. The robot has three ultrosonic senors in order to detect nearby objects. The ardunio controls the motors and senors while the dragonboard sends data to the computer where it is plotted on a graph.
Challenges we ran into
We were unable to get a stable internet connection from the ardunio since the wifi adapter was not working.
Accomplishments that we're proud of
I am proud that we were able to create a robot that maps the room in such a limited time environment.
What we learned
We learned how to create graphs and connect network sockets in java.
What's next for Mapper-Man
We want to add a gps sensor for the mapper so it can become more autonomous.




Log in or sign up for Devpost to join the conversation.