-

-

-

-

-

-
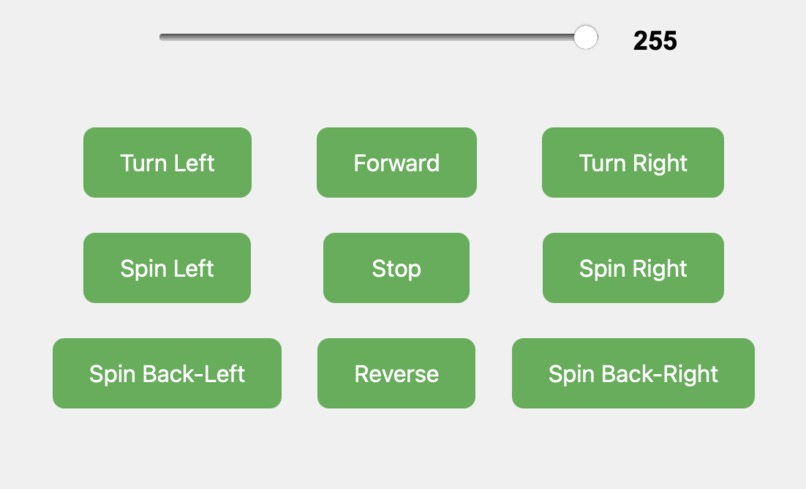
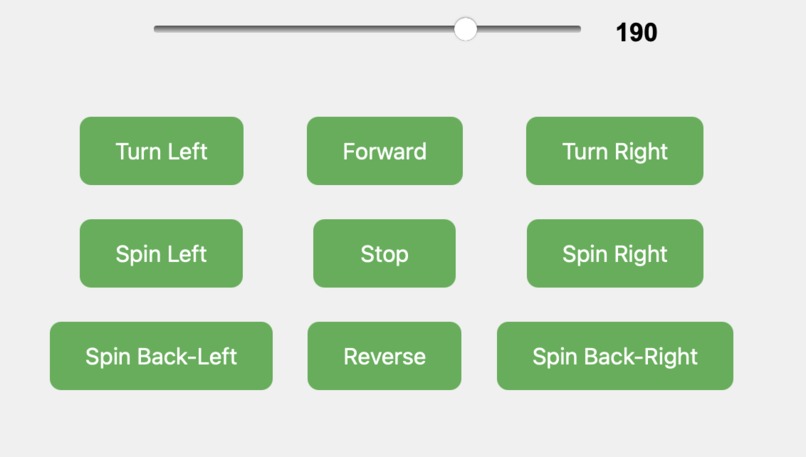
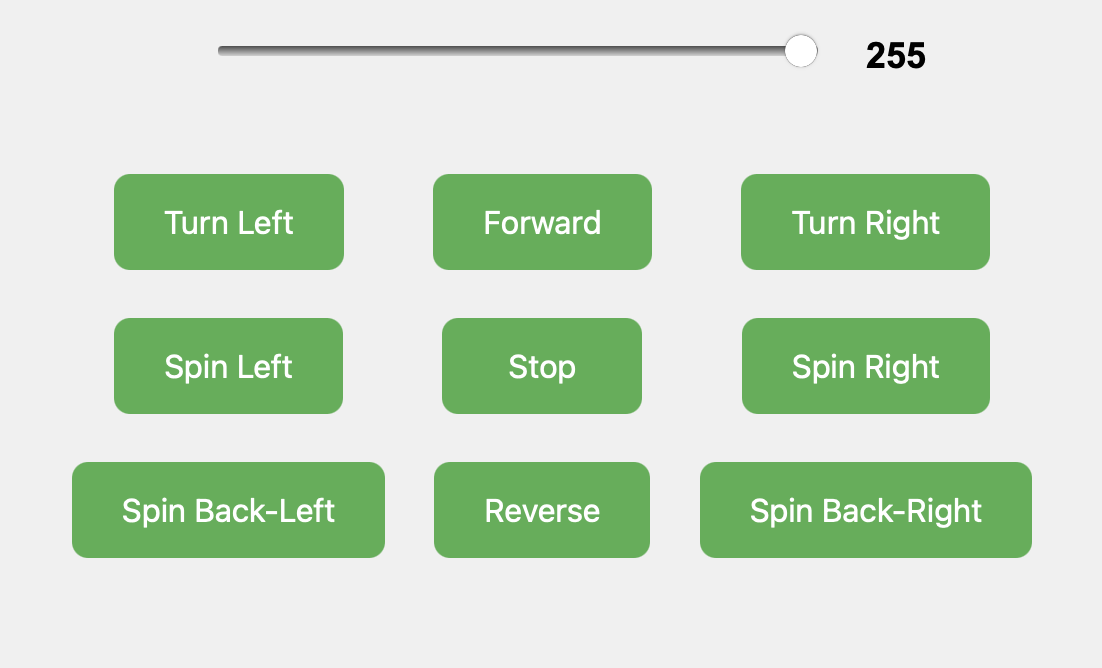
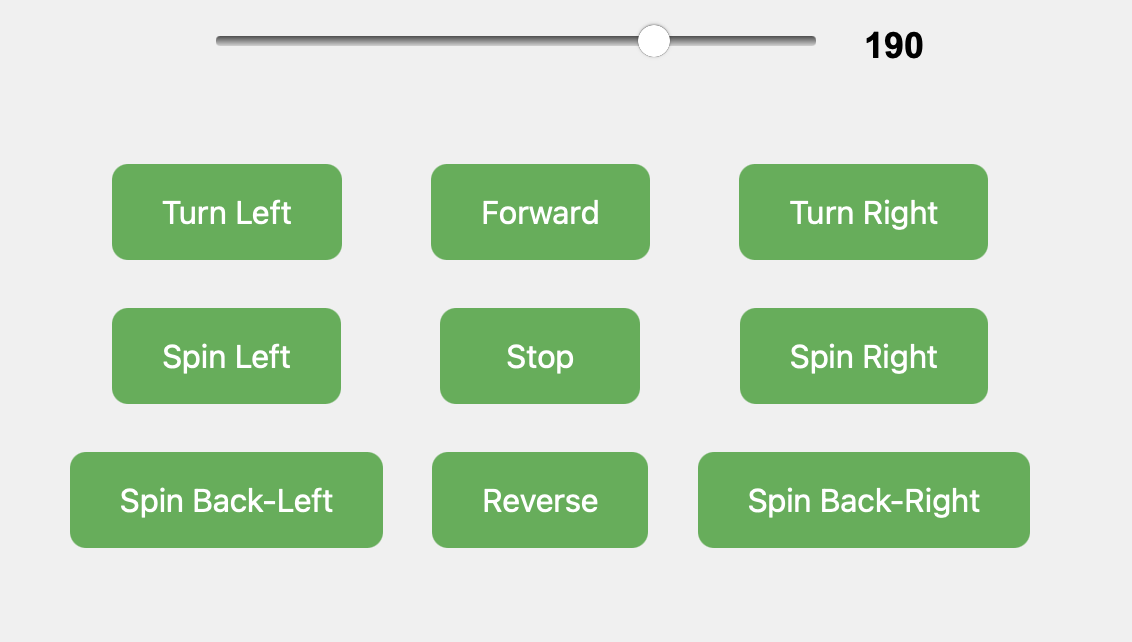
The web interface for control of direction and speed
-

-

-

-

-

-

-

-

-
-

-

-

-
-

-
-

-




















Inspiration
Over 5.5 million Americans use a wheelchair regularly and the starting cost of an electric wheelchair is around $1300. Many Americans do not have access to insurance willing to cover these costs, or their insurance has restrictively high deductibles.
What it does
The kit allows anyone with a basic office chair to build a motorized wheelchair, using almost entirely off-the-shelf commonly available parts! Mount adaptable base to the pneumatic column on most office chairs, and the motors will propel you around.
How we built it
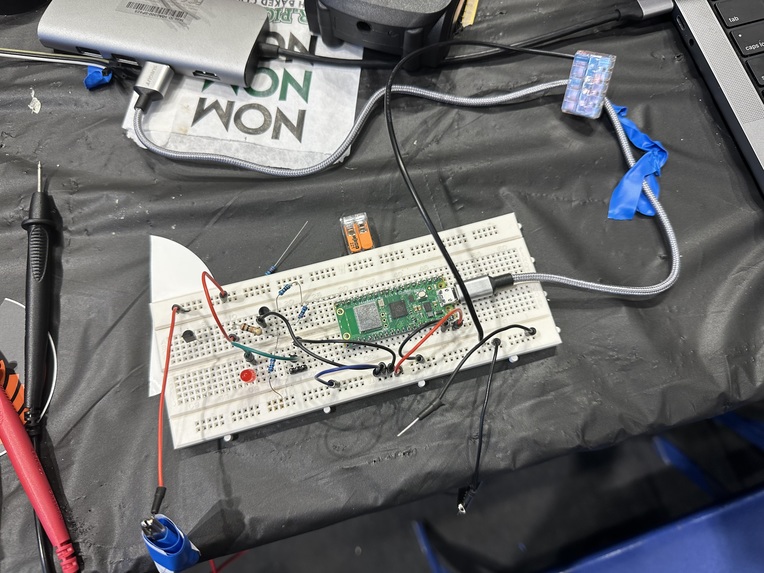
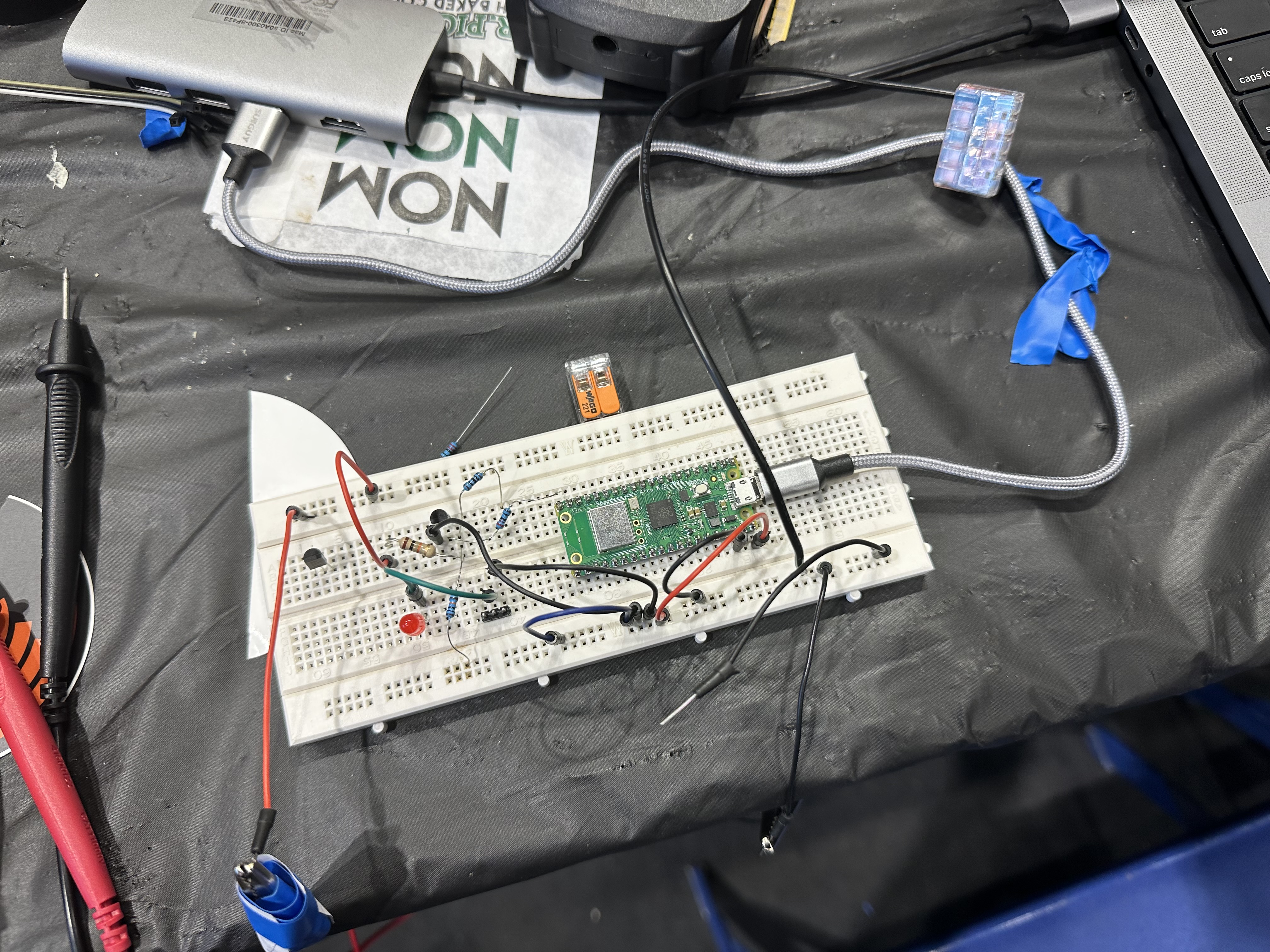
We used a Raspberry Pi Pico W to control our wheelchair, through a simple interface hosted on a webpage. The kit itself uses 2 brushed DC motors found inside (2) power drills. Those were attached to a motor controller along with their own respective DC batteries.
Challenges we ran into
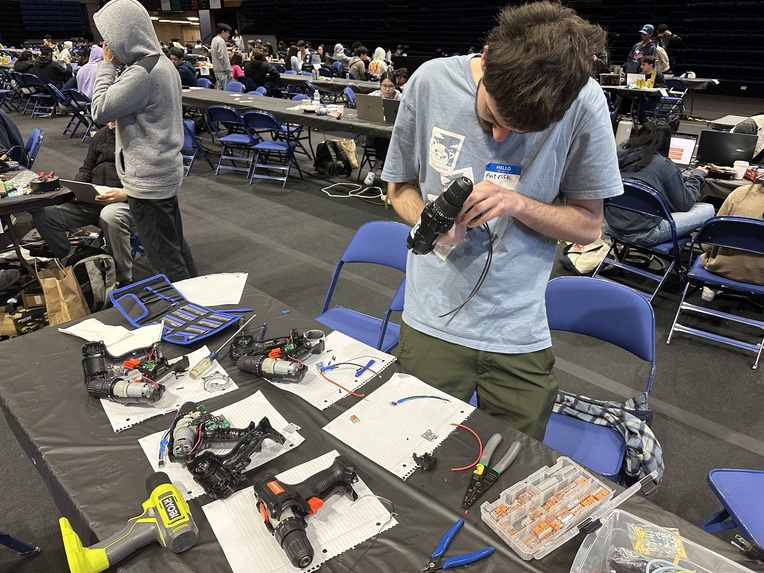
This project was extremely challenging because we didn't have some of the key parts needed to pull this off. We had to run to Harbor Freight to grab the cheapest power drills we could find and repurpose their motors. Next, we had to find a basic office chair and come up with a clever design that would allow us to adapt our kit to any wheelchair. We also needed to create enough downward force for the motorized wheels to create enough friction with the ground to move the wheelchair. One of the biggest challenges we ran into is driving the power MOSFETs, used to control the speed of the motors, which kept burning out resulting is a collection of fun and varyingly effective workarounds.
Accomplishments that we're proud of
We were successful in building most of the basics for an electric wheelchair un under 24 hours! Our design used cheap and commonly available off the shelf parts, which was an interesting challenge!
What we learned
Hardware hacks are hard! Having so many moving parts leads to more potential failure points. We ran into many instances where the motors (and especially the speed-control mosfet wouldn't behave as expected. With some more preparation and proper equipment, such as standard speed controllers for our motors, it would've been much easier.
What's next for Manic Moover
First of all, we'll get speed controllers that can handle this much current and have good documentation. In the future we want to take our electric wheelchair and make it so that those who struggle to move their arms and legs can use their gaze to control their wheelchair! We would use eye tracking technology to help them accelerate, break and steer their wheelchair!
Built With
- css
- html
- micropython
- raspberry-pi
- raspberry-pi-pico




Log in or sign up for Devpost to join the conversation.