-
-
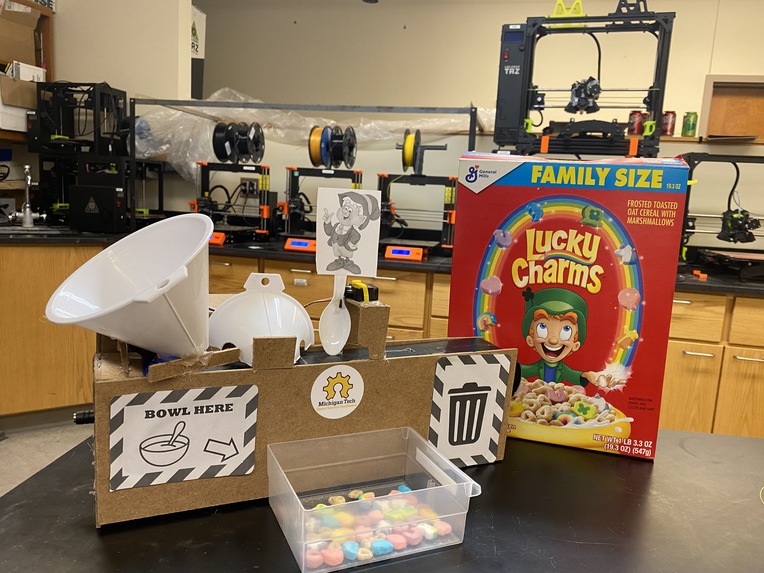
Overall picture of the bot
-
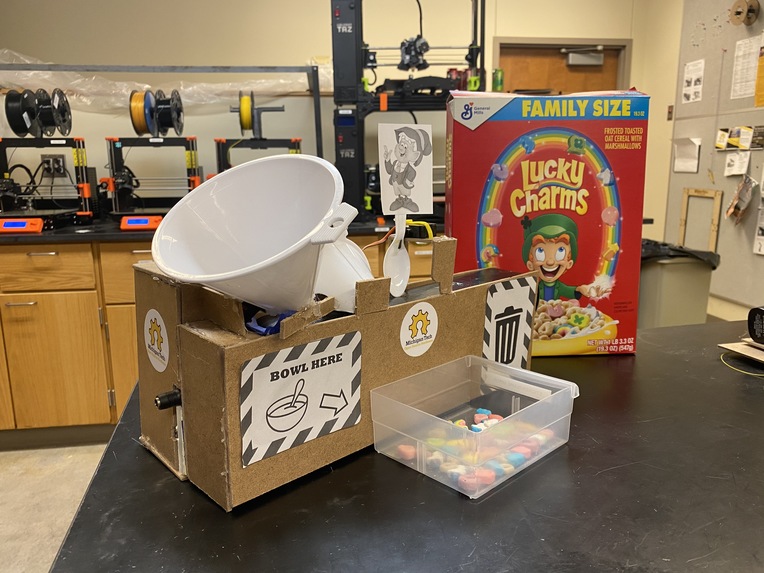
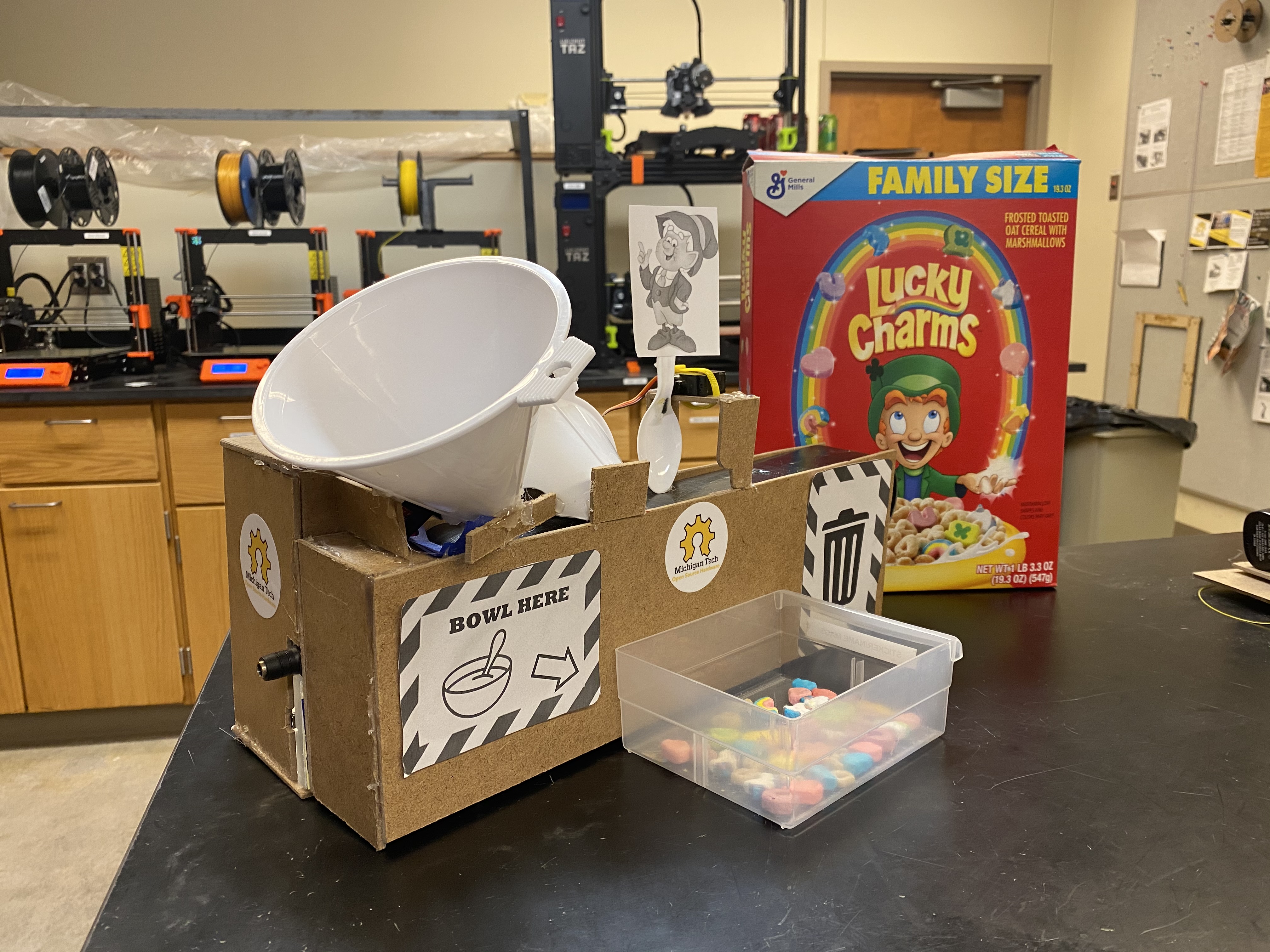
Another angle of the front of the bot
-
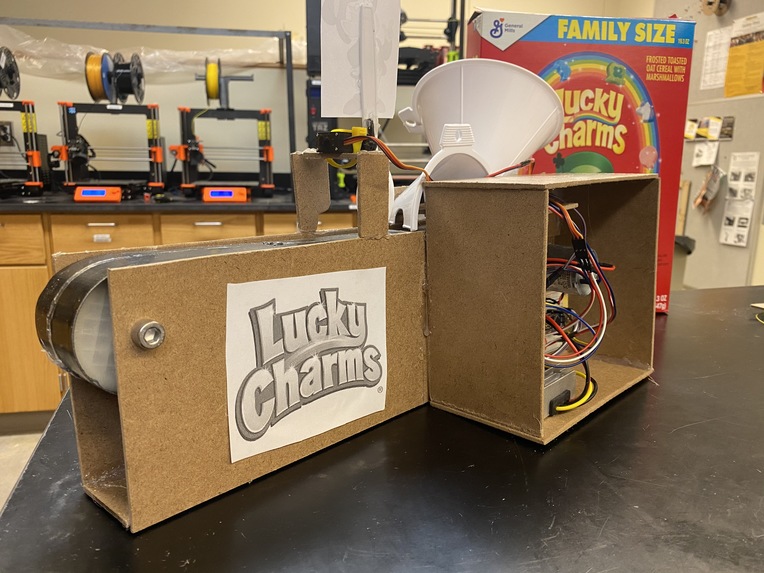
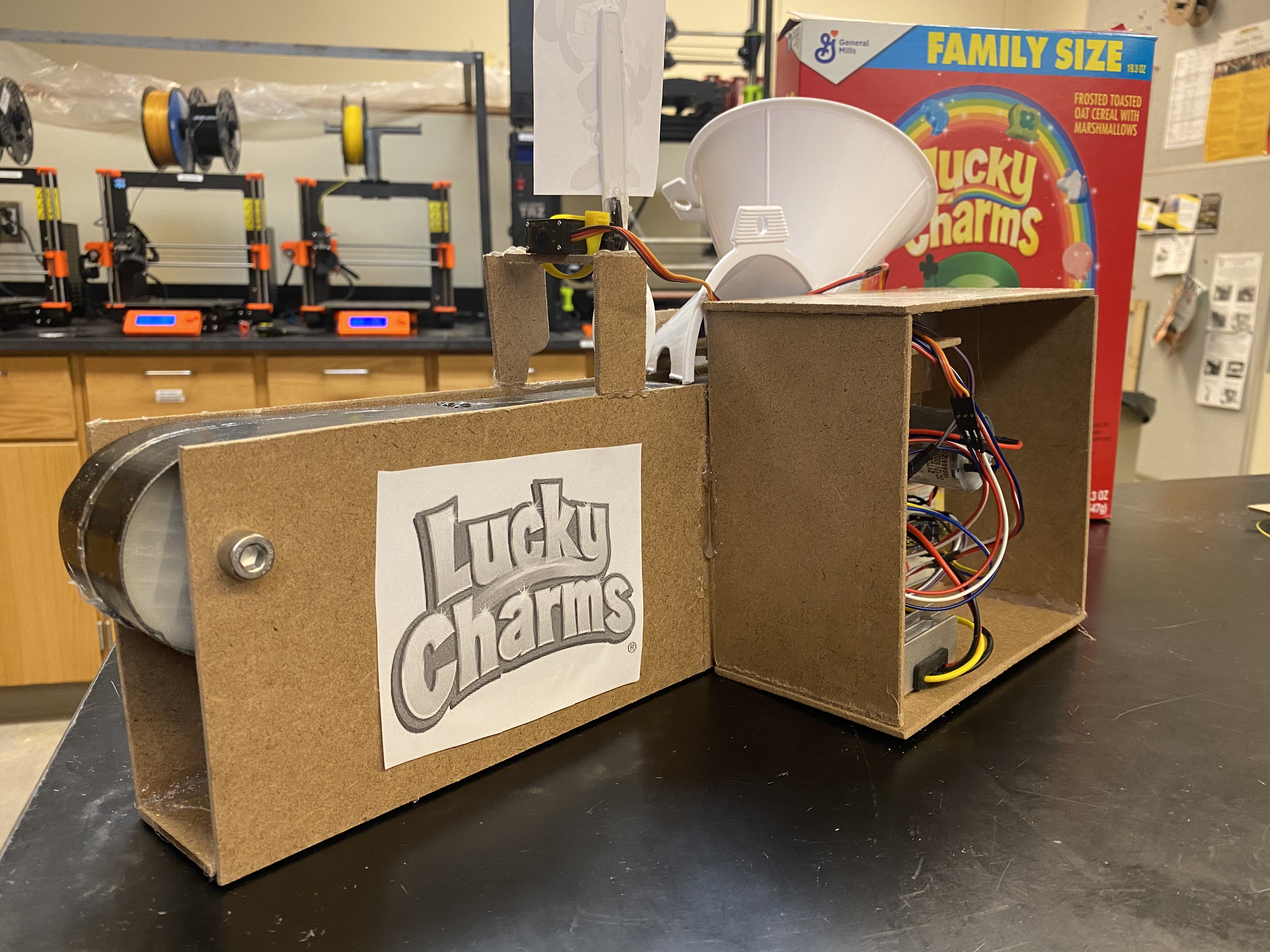
Back of the bot
-
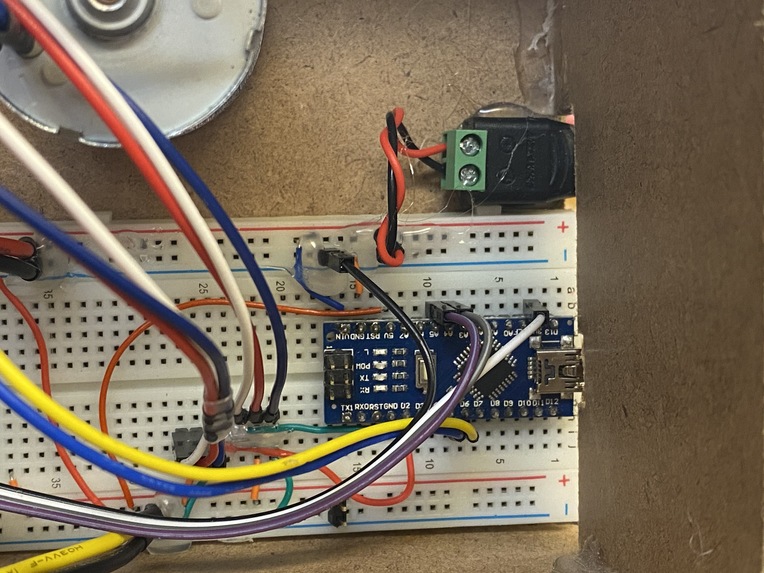
Upclose electronics picture
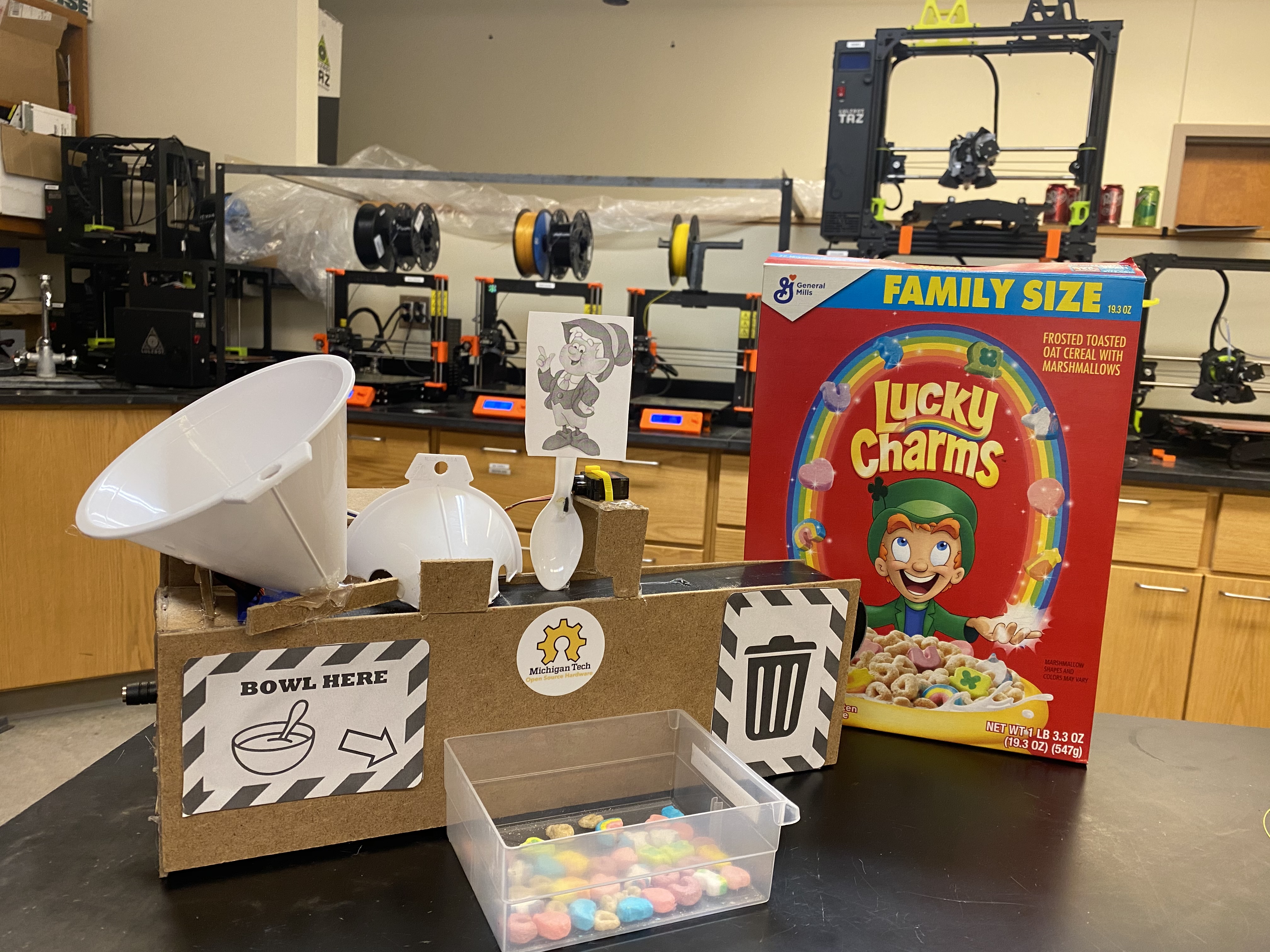
Inspiration
Earlier in the week while brainstorming our project using design thinking we had two criteria. It needs to be food-related and needs to be useless but awesome. So, we came across the worst part of my favorite cereal, there is a terrible ratio of marshmallows in Lucky Charms.
What it does
Using an Adafruit RGB Color Sensor (ID: 1334) we can detect the color of the belt and the cereal. When the color does not match the belt or cereal we use a servo to fling the marshmallow into our serving bowl.
How we built it
Using an Arduino Nano, Adafruit RGB Color Sensor (ID: 1334), Adafruit DRV9971 Breakout (ID:3190), two micro servo motor, dc geared motor, 12v 1.5A PSU, 5v regulator. We used tempered hardboard for the bulk of the construction and funnels to cover the color sensor and place the cereal pieces on the belt. The belt is constructed from Gorilla tape.
Challenges we ran into
The main challenge ran into was the timing between sensing the proper color and pushing the cereal piece off the conveyor.
Accomplishments that we're proud of
We are proud of the entire bot because we built it in ~10 hours and are able to sort lucky charms with decent accuracy.
What we learned
We learned a lot with the parameter of registering an RGB color. Another lesson learned was using timed interrupts in the right spot.
What's next for Lucky Sorter
The next steps for this project are to increase the accuracy and improve the overall dispensing process of the bot.


Log in or sign up for Devpost to join the conversation.