-
-

LiDAR mount
-

LiDAR headset
-
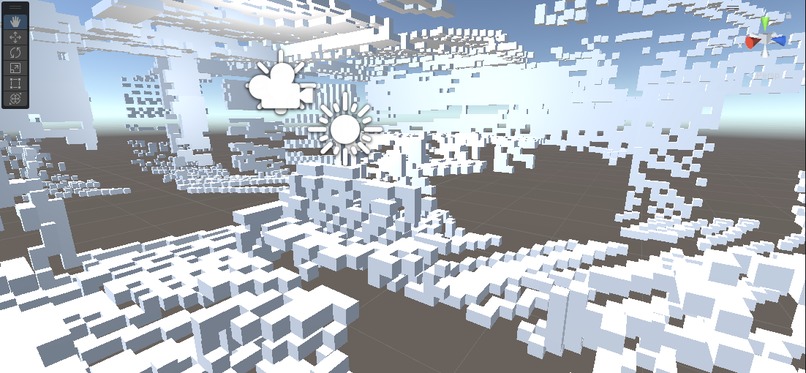
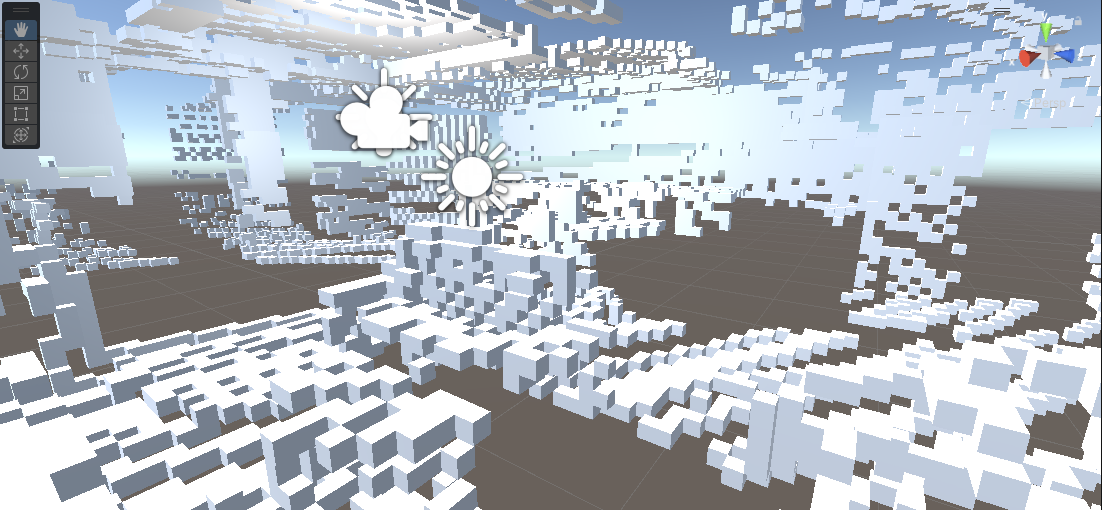
Voxel Mesh created from Simulated Lidar Data
-

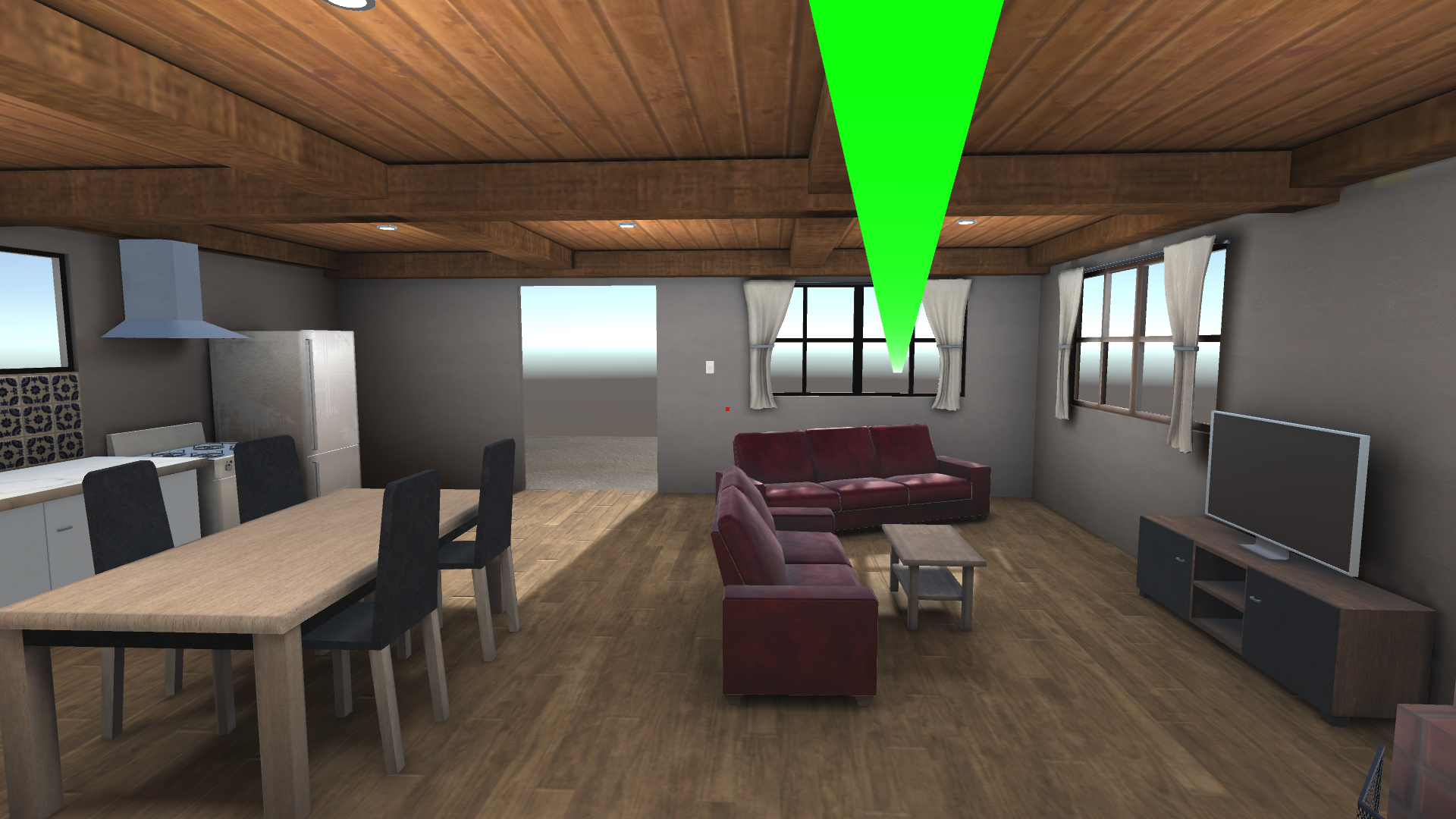
Simulation of LiDAR


Inspiration
As laser-power sensing equipment finds integrations in the manifold of hands-on fields from topography to robotics, the rising affordability of LiDAR equipment has widened the scope of potential applications, providing incentives to design and implement new resources for simulations research. In the interest of exploring this niche, our team developed LOCATE, or LiDAR Optical Calibration And Tracking Equipment, as a low-cost, open-ended tool to measure and simulate real-world environments in real time.
What it does
Merging powerful simulation tools in Unity, flexible 3D-printed components, and cost-efficient sensors, LOCATE uses rapid laser-assisted measurements which a sophisticated SLAM (Simultaneous Localization and Mapping) method generates into a voxel-based representation of local geometry. Providing a tactile three-dimensional interface to the user, real-world settings may be analyzed and digitally captured with a portable, modular device.
How we built it
Taking advantage of open-source design software like openSCAD and 3D-Printing tools, the early design process significantly involved the production of the LOCATE's mount, which is attached to the strap of a headset. Considering the complexity of the project, numerous hardware components, including microcontrollers, gyrometers, and other components, were linked to properly record and transmit spatial data to the Unity simulation.
Challenges we ran into
One of our sensors was burned out by poor soldering, posing a significant challenge to the noise of our data. Networking errors posed numerous logistical challenges to the project, as well as SLAM optimizations which served as significant hurdles for the project. Despite these quirks, however, the project was successful and wholly completed.



Log in or sign up for Devpost to join the conversation.