-
-

Agenda and Objective Slide
-
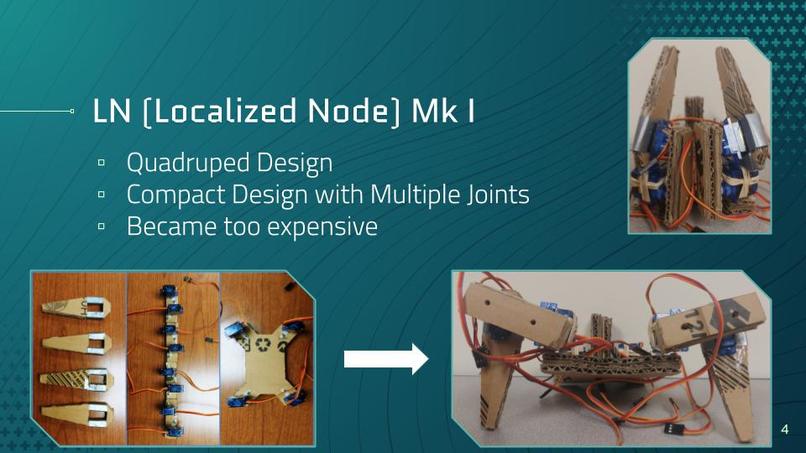
LN Mark I Slide
-
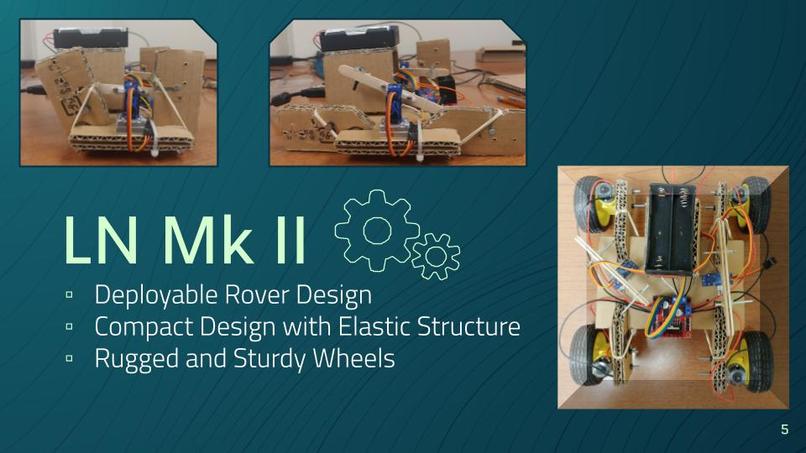
LN Mark II Slide
-

Advantages Slide
-
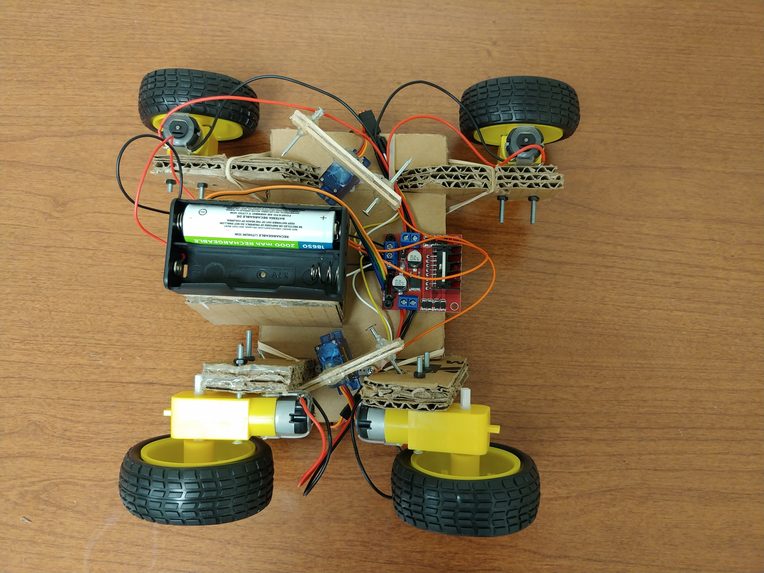
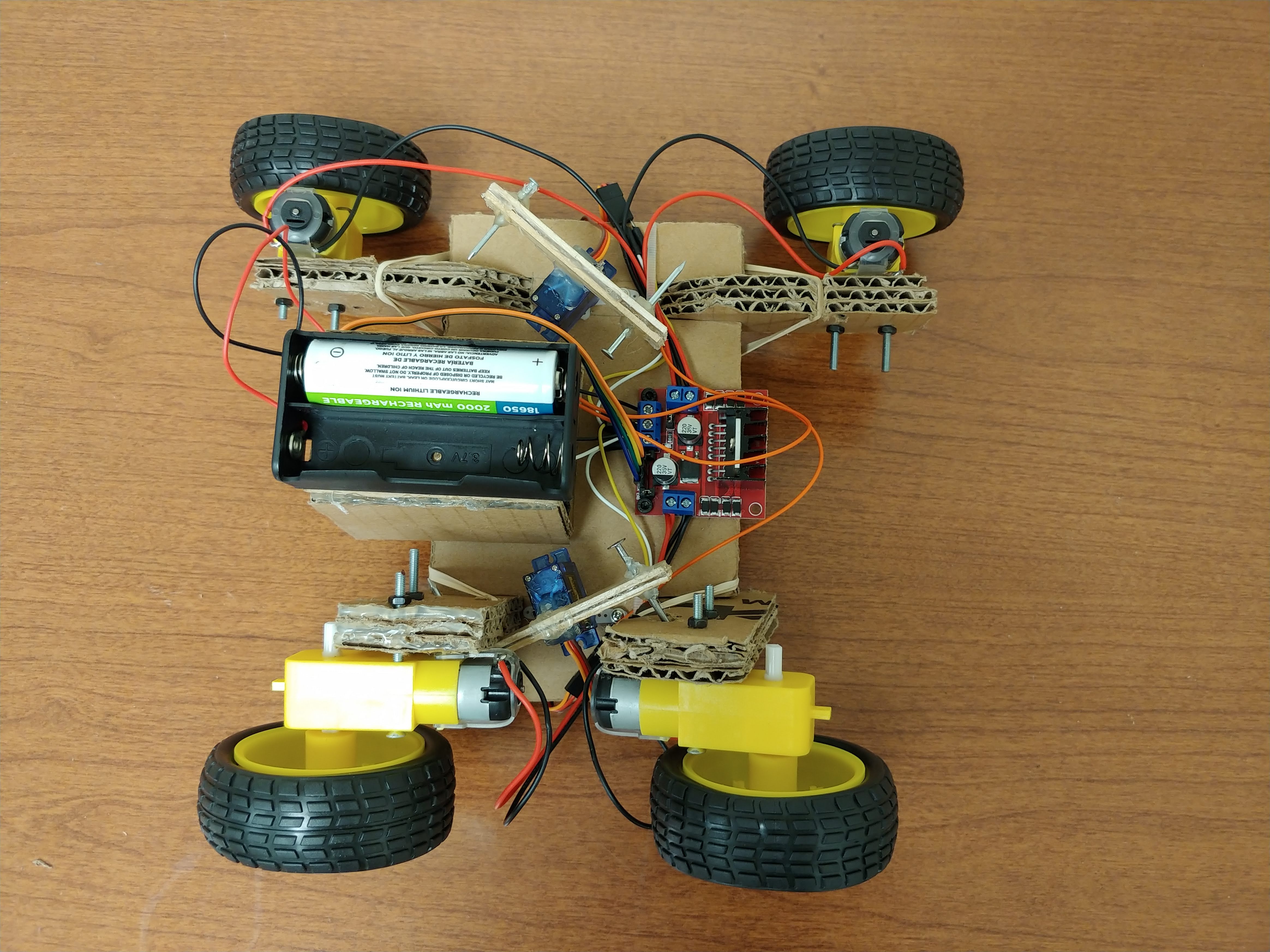
Top Down View
-
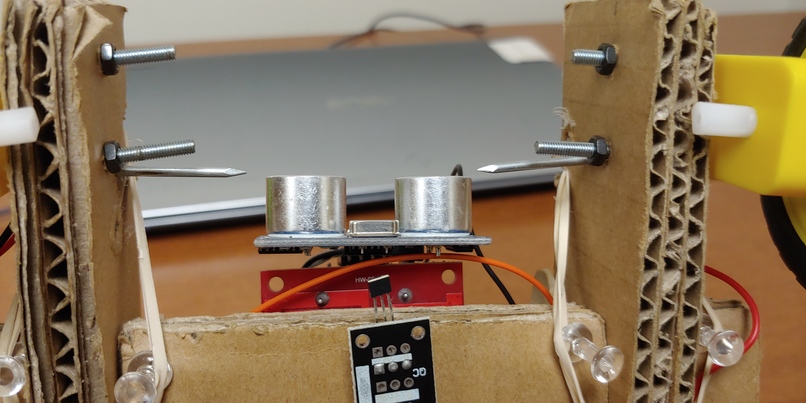
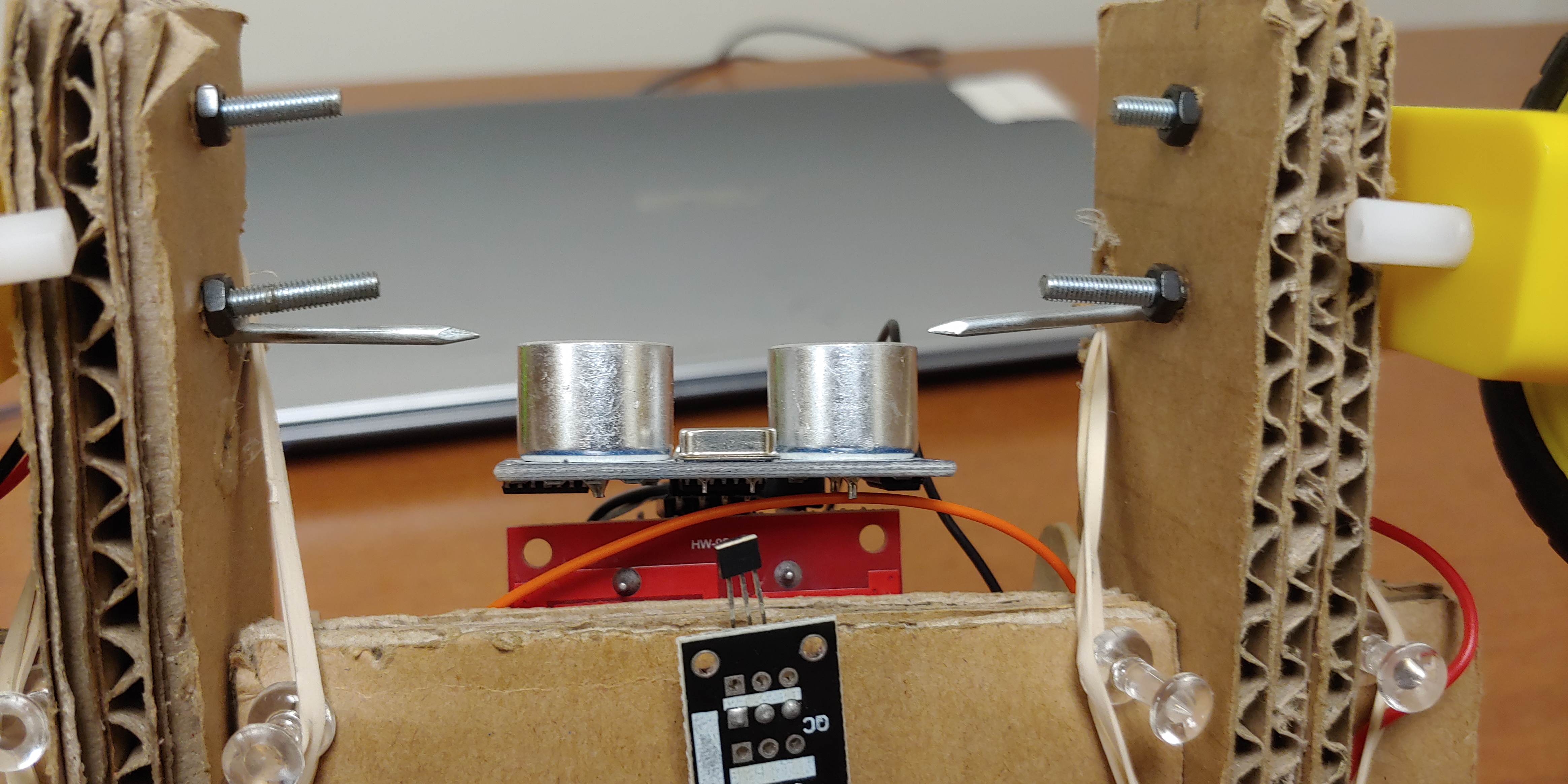
Ultrasonic + Hall Effect Sensor


Inspiration
The consequences of insufficient land surveying and exploration technologies aren’t what immediately come to mind when considering some of the most critical problems that society faces today. However, phenomena like urban sprawl, unhealthy farming practices, and urban heat islands are the reality for millions of people living in developing countries that do not have access to any more efficient ways of living their day-to-day lives. Our initiative aimed to establish a low-cost, durable network that could be established worldwide for many of these locations. This would enable locals better to understand sustainable interactions with the land around them, ensuring a stable future and a healthier planet.
What it does
Our rover will help to survey and analyze terrains for soil content, topography, and landform mapping. Our rover is ideal for terrain exploration due to its ability to travel across diverse terrains and considerable durability from its rugged suspensions. The ultrasonic sensor can accurately measure the distance and relief of the terrain that stands in the rover's way, while the Hall effect sensor can offer insight into the levels of many nutrients in the soil. Additionally, the rover can explore compact spaces due to its miniature size, which allows for exploring regions that are dangerous for humans and damaging to current technologies.
How we built it
Over the course of the weekend, we worked to build a rover to assist in surveying and analyzing various terrains. We constructed a fully cardboard chassis with leg-like structures for deployment. Our system of elastic-based deployment consists of popsicle sticks, nails, rubber bands, and servo motors. For more on how the deployment system works, reference the attached video. An Arduino Uno lies in the rover's center along with a 18650 battery pack on the top. On the front of the rover, we placed a Hall effect sensor to detect magnetic fields. Along with the Hall effect sensor, an ultrasonic sensor is located at the front to measure the distance of obstacles from the rover. The rover is currently operated by a Bluetooth module to control it remotely from a smartphone. Along with a rigorous debugging process, we were able to write the code necessary for our rover to function.
Challenges we ran into
During this weekend, we first built Localized Node (LN) Mk I. We tried to implement a compact quadruped design with multiple joints, allowing us to reduce the robot's overall size on command. Upon further inspection, we soon realized that this design required too much power and was too expensive for our goal of economical design. There were also too many bugs and other errors we faced due to the complex but necessary walking algorithms. Coordinating each leg to move effectively on various terrains proved inefficient, as we did not have enough time to adjust our code for every occasion. The model was inhibited by our circumstances, and we quickly began work on LN Mk II. Even under these time constraints, we still achieved a compact design with an elastic deployment structure for quick, effective release sequences. With sturdy and durable wheels, this new rover could traverse most any terrain with few code adjustments. The versatility and operability of the new model boasts reliable travel capabilities for a vast network of these nodes.
Accomplishments that we're proud of
Our proudest accomplishment would be completing the Mk II within an incredibly tight time constraint. This was amplified by the failure of the Mk I, which forced us to restart our project and redesign our rover from the top down. In addition to the time constraint, we needed to work with a limited budget. This was because we wished to have the ability to scale-up these singular devices into a maneuverable, interconnected system. Thus we elected to use common, household items in order to meet our objectives. Even though our materials were limited, we were able to manifest our sophisticated mechanisms successfully. As such, we are optimistic that with materials that yield greater efficiency and more forgiving time constraints, our rover will become even more effective.
What we learned
We learned that the Mark I was not reflective of our goals to achieve a cost-efficient and scalable design. The positive relationship of the power to weight ratio of heavy lithium batteries proved to be the most significant flaw of the original Mk I design; because the quadruped could not support the batteries' weight, we attempted to reduce the weight by using lighter batteries. However, this meant that there was not enough power to run the Mk I's 12 servo motors. Consequently, when designing the Mk II, we resorted to using only two servo motors, wheels, and a pair of 18650 batteries. This allowed us to maintain a compact rover with a power-efficient deployment system. From the struggles we faced with the first design, we learned that expensive materials were not necessary to build an efficient exploration rover. For the deployment system, instead of trying to cram multiple servo motors for an overly elaborate deployment system, we decided to weaponize the friction in screws and elasticity in rubber bands to our advantage, creating just as efficient of a rover with far less resources invested.
What's next for Localized Node Initiative for Exploration
As stated before, this project aims to create a mass deployment system of the localized nodes to survey large areas of land in a timely manner. Due to the rover currently being constructed out of cheap, common materials such as cardboard and rubber bands, we hope to use sturdier materials in the future. If afforded more time, we would like to 3D print our chassis along with the “legs” of the wheels. Moreover, the production process of the current rover was lengthy and very tedious. We hope to improve upon our existing mechanisms and designs to facilitate this process. The reduced labor and production costs would mean a more realistic and accessible goal of deploying these rover networks in developing nations worldwide.
Built With
- arduino
- bluetooth
- c++
- cardboard
- general-motors-in-vehicle
- hall-effect
- newping
- servo


Log in or sign up for Devpost to join the conversation.