-
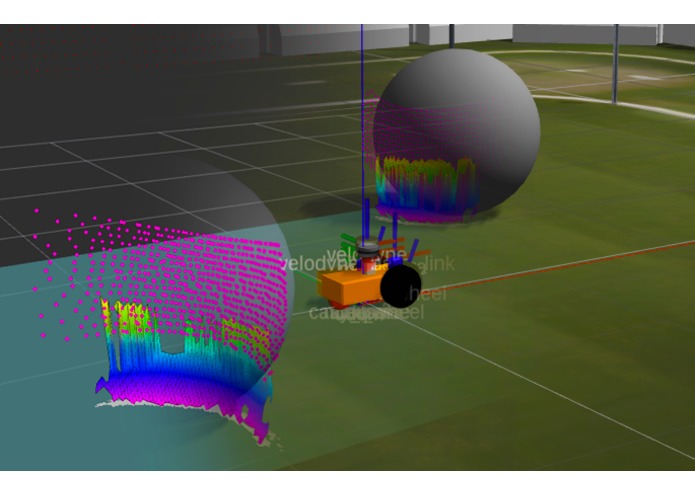
Creating an intensity map based on nearby objects
-

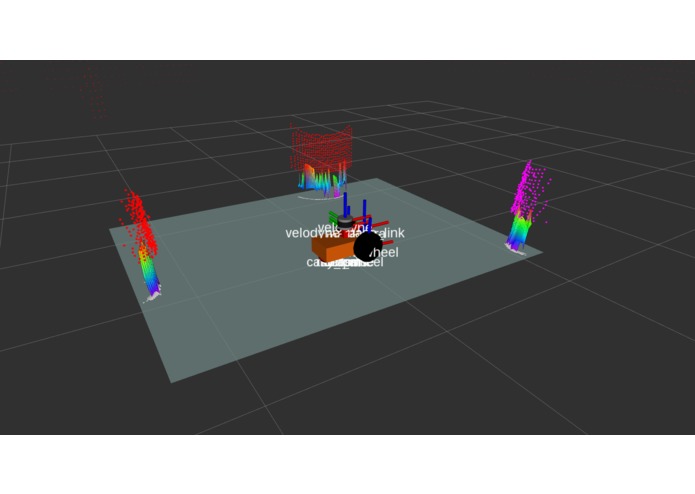
The simulation used to test the project
-
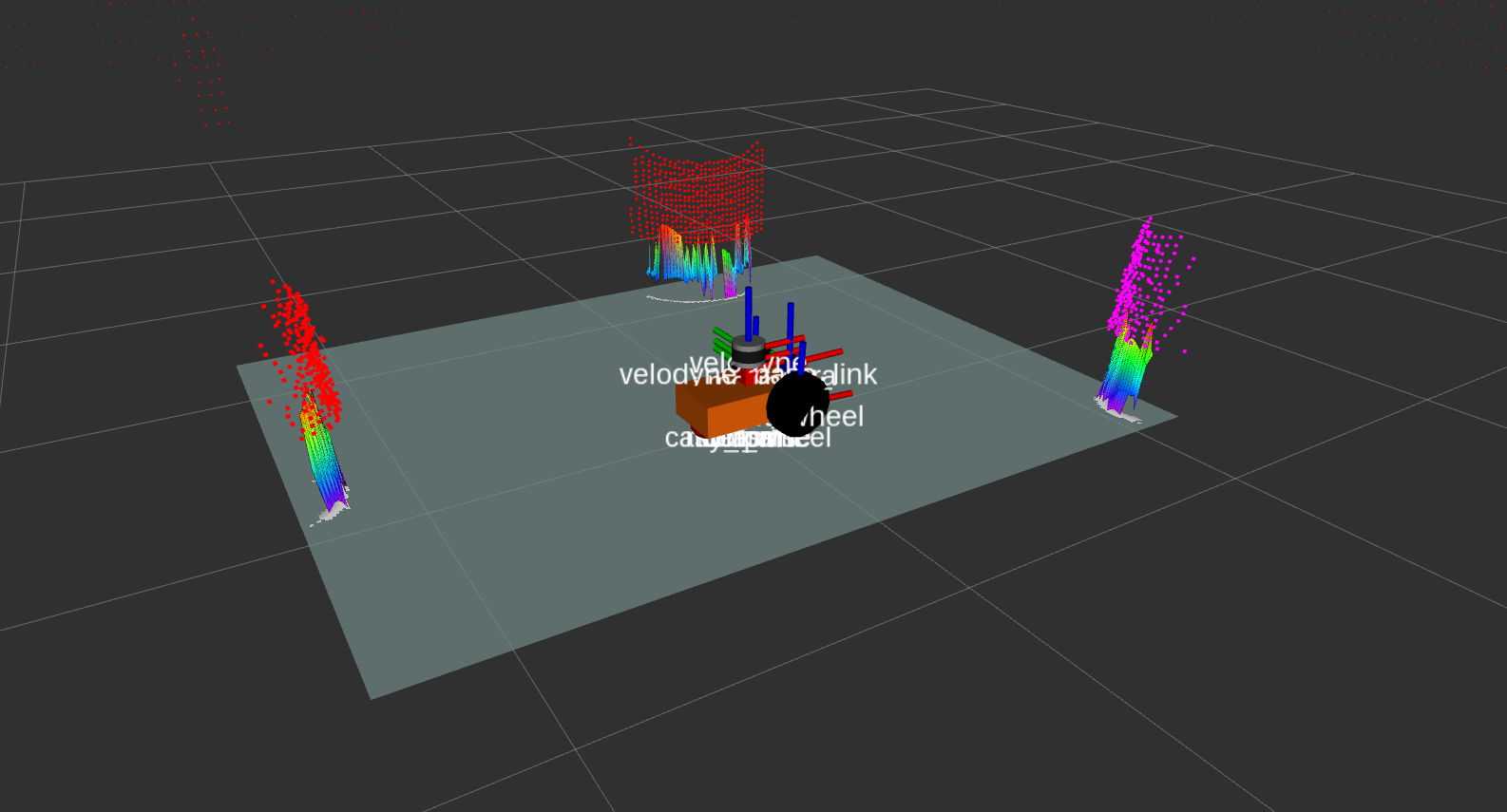
The robot's reconstruction of the simulated enviornment


Inspiration
Our goal is to improve road safety for individuals in autonomous and semi-autonomous vehicles.
What it does
We use a 3D laser rangefinder (also known as 3D-LIDAR) to build a virtual mesh of the environment surrounding the vehicle. We then analyze this environment to plan vehicle movements and avoid obstacles autonomously.
How we built it
We read binary point cloud data from a 3D lidar, then after filtering with the Moving Least Squares algorithm we build a greedy mesh from the points. We then squash this to a 2.5D height map using the PointCloudLibrary, which we use to generate a 2D OccupancyGrid. Finally, a pathfinder can use this occupancy grid to pathfind around objects autonomously and in real-time. The system is built on top of the Robot Operating System (ROS) and Ubuntu linux 16.04.
Challenges we ran into
The combination of extensive (6+ hr) compilation times, outdated library documentation, link time template errors, and poorly implemented APIs provided by ROS slowed the project to a crawl at times.
http://TheseAreNotTheDocsYouAreLookingFor.com/
Accomplishments that we're proud of
The aforementioned challenges provided excellent experience in peer programming, team collaboration, problem solving and Google-fu. We are also proud of the working prototype of the system we were able to create despite the challenges.
What we learned
We learned to work as a team to adapt to changing conditions in a high pressure environment.
What's next for Localized Laser Object Detection
We intend to use the system to provide an open and accessible way to for others get involved with autonomous driving systems.







Log in or sign up for Devpost to join the conversation.