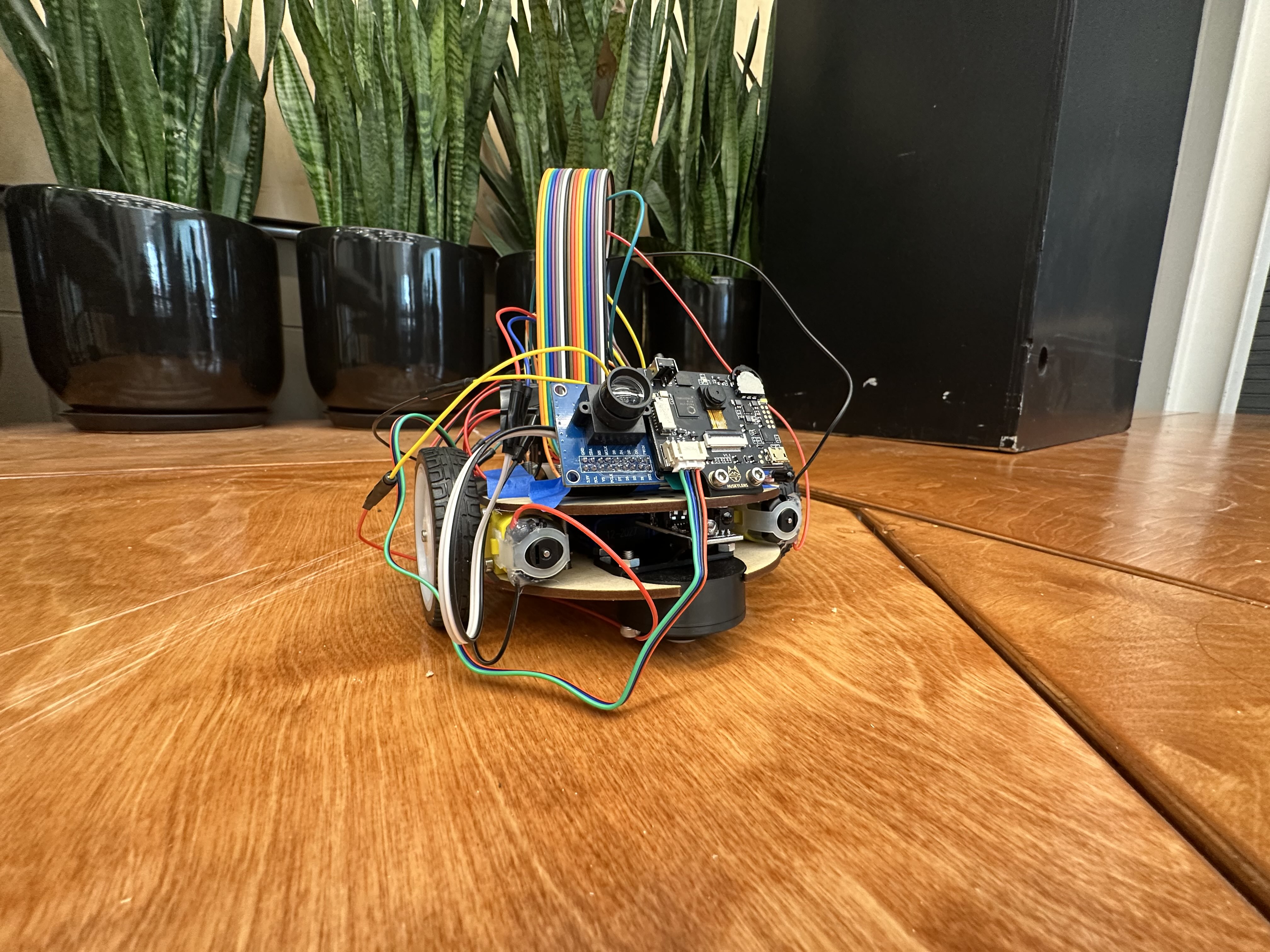
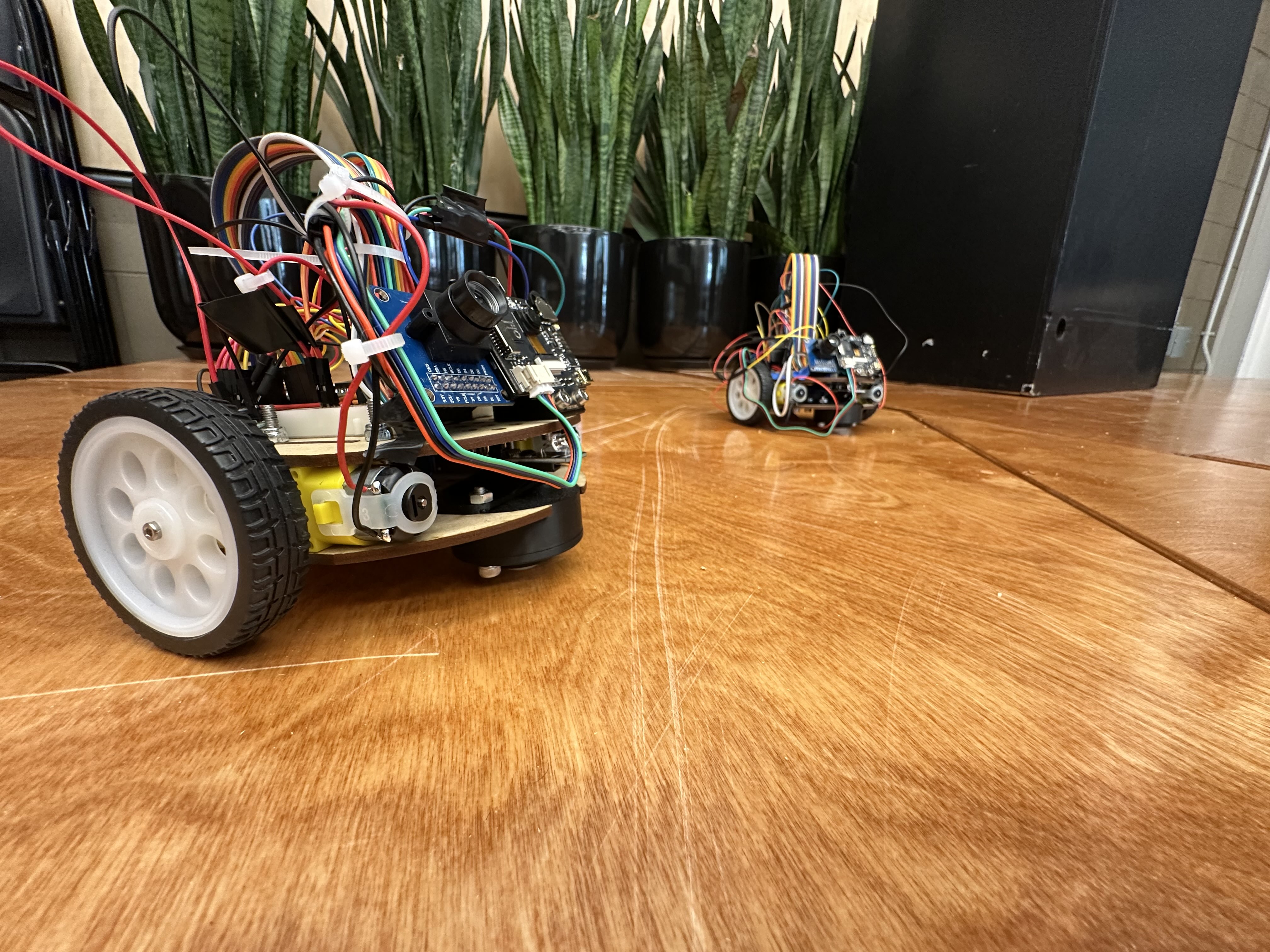

Our team, "Artificial Incompetence," developed the "Little Homies," which are robots focused on the themes of smart home security. The team wanted to find an innovative way to successfully protect homeowners from environmental or personal threats without causing too much discomfort with clunky hardware. The rise of IoT devices has allowed the possibility of leveraging many small systems to collect and transport massive amounts of information compared to one huge system. Initially, taking inspiration from the "Roomba," we intended to create a modular robot with sensors that would collect and send information to house owners. Specifically inspired by the collaboration of ants and bees, we elevated the singular information-gathering platform to develop the firmware and framework for multiple robots to communicate with each other and work together to protect homes.
Our team's experience in robotics was singlehandedly the reason we completed the project on time. Coming to the hackathon with no prior work done on the project, the design phase started with the team deciding what microcontroller we wanted to learn and ultimately leverage for our project. We were grateful that NJIT's IEEE club had supplied us with Espressif ESP32s, which immediately spoke to us about their peer-to-peer and network connection capabilities. Next, we went straight into CADing the potential design of the robot using Fusion360 to work on potential designs collaboratively. Initially, the robot was intended to be larger and more squarely shaped to help with potential wiring issues when attaching sensors to the chassis. However, through some debate, we made more miniature rounded robots to simplify its moving mechanism. Then, because the most expensive type of household damage comes from water and frozen pipes, the most devastating comes from fires, and the most traumatizing comes from burglaries, we decided to pick sensors to detect and prevent such instances.
Due to the short time frame with this lackluster focus of scope, we got to work quickly configuring the robot, its sensors, and its autonomous control. By the end of the hackathon, we had successfully made significant strides in the robot's sensing and networking abilities. Its sensing abilities were the foundation of our project, as without them, we would have no information to relay to homeowners to help protect them and their assets. Specifically, the robot could sense fires in a 12-foot radius, leaks of under half an inch of water, the room's temperature, and obstacles in front and around it, and use AI for facial recognition. Once we understood the capabilities of our sensors, we leveraged our ESP 32's peer-to-peer and networking capabilities to have the robots talk with each other and their owners, which proved to be the most challenging aspect of the whole project. The hardware that was supplied demonstrated the importance of proper drivers and firmware. At the beginning of the hackathon, half the team was sidelined due to firmware issues, specifically the baud rates of the board not matching up with the serial monitors; however, even after that, the group stayed puzzled by the ever-expansive possibilities of the ESP 32s. While initially connecting to the internet and peer devices was simple, data transfer between devices posed some challenges. When sending data over to the other device, both devices have to have a standard structure for how data is packaged so that the other can parse it. There were instances where one device would send data in a different format, such that the other device could not unpack it. To solve this, we made a standard format for data transfer where data was packaged into identical structs, and proper data types were chosen before being sent.
Coming in with extensive prior knowledge about robotics's mechanical design, we were most proud of learning new programming skills. For the programming side of things, our programmers learned how to use state machines effectively. With all of our bots communicating utilizing a peer-to-peer architecture and a protocol that does not have a two-way handshake, much thought has to go into ensuring that the state machines handling communication between the robots can maintain effective communication. If one robot sends essential information to the other robot and that information is corrupted, the other robot's state machine might not correspond with the sender's state. Apart from what we learned over the hackathon, the group looks forward to what we will learn continuing this project. The following steps for the project include, most importantly, creating an app in which robot owners can live stream footage from their "Little Homies" at any time, anywhere. During the very tail end of the hackathon, the team overzealously attached another camera, hoping they could add this feature in time. Unfortunately, while the hardware was considered, the software proved to be more daunting than previously thought and will be completed later in the project's life cycle.

Log in or sign up for Devpost to join the conversation.