-
-
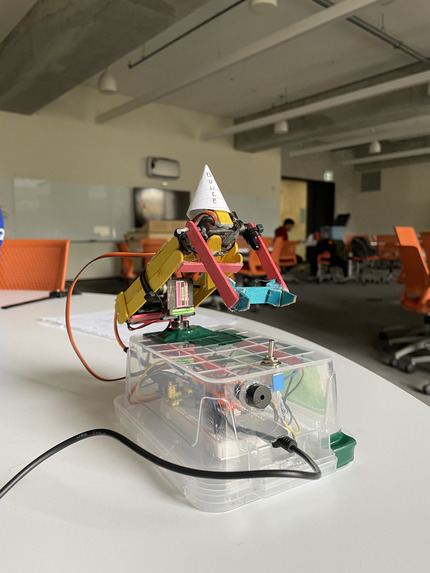
Little Dunce, Isometric View
Inspiration
As a team, we were immediately intrigued by the creative freedom involved in building a ‘useless invention’ and inspiration was drawn from the ‘useless box’ that turns itself off. We thought ‘why not have it be a robot arm and give it an equally intriguing personality?’ and immediately got to work taking our own spin on the concept.
What It Does
The robot has 3 servos that allow the robot to move with personality. Whenever the switch is pressed, the robot executes a sequence of actions in order to flick the switch and then shut down.
How We Built It
We started by dividing tasks between members: the skeleton of the code, building the physical robot, and electronic components. A CAD model was drawn up to get a gauge for scale, and then it was right into cutting and glueing popsicle sticks. An Exacto blade was used to create holes in the base container for components to fit through to keep everything neat and compact. Simultaneously, as much of the code and electronic wiring was done to not waste time. After the build was complete, a test code was run and highlighted areas that needed to be reinforced. While that was happening, calculations were being done to determine the locations the servo motors would need to reach in order to achieve our goal. Once a ‘default’ sequence was achieved, team members split to write 3 of our own sequences before converging to achieve the 5th and final sequence. After several tests were run and the code was tweaked, a demo video was filmed.
Challenges We Ran Into
The design itself is rather rudimentary, being built out of a Tupperware container, popsicle sticks and various electronic components to create the features such as servo motors and a buzzer. Challenges consisted of working with materials as fickle as popsicle sticks – a decision driven mainly by the lack of realistic accessibility to 3D printers. The wood splintered and was weaker than expected, therefore creative design was necessary so that it held together. Another challenge was the movement. Working with 3 servo motors proved difficult when assigning locations and movement sequences, but once we found a ‘default’ sequence that worked, the other following sequences slid into place. Unfortunately, our toils were not over as now the robot had to be able to push the switch, and initial force proved to be insufficient.
Accomplishments That We’re Proud Of
About halfway through, while we were struggling with getting the movement to work, thoughts turned toward what we would do in different sequences. Out of inspiration from other activities occurring during the event, it was decided that we would add a musical element to our ‘useless machine’ in the form of a buzzer playing “Tequila” by The Champs. This was our easiest success despite involving transposing sheet music and changing rhythms until we found the desired effect. We also got at least 3 sequences into the robot! That is more than we were expecting 12 hours into the build due to difficulties with programming the servos.
What We Learned
When we assigned tasks, we all chose roles that we were not normally accustomed to. Our mechanical member worked heavily in software while another less familiar with design focused on the actual build. We all exchanged roles over the course of the project, but this rotation of focus allowed us to get the most out of the experience. You can do a lot with relatively few components; constraint leads to innovation.
What’s Next for Little Dunce
So far, we have only built in the set of 5 sequences, but we want Little Dunce to have more of a personality and more varied and random reactions. As of now, it is a sequence of events, but we want Little Dunce to act randomly so that everyone can get a unique experience with the invention. We also want to add an RGB LED light for mood indication dependent on the sequence chosen. This would also serve as the “on/off” indicator since the initial proposal was to have a robot that goes to sleep.

Log in or sign up for Devpost to join the conversation.