-
-
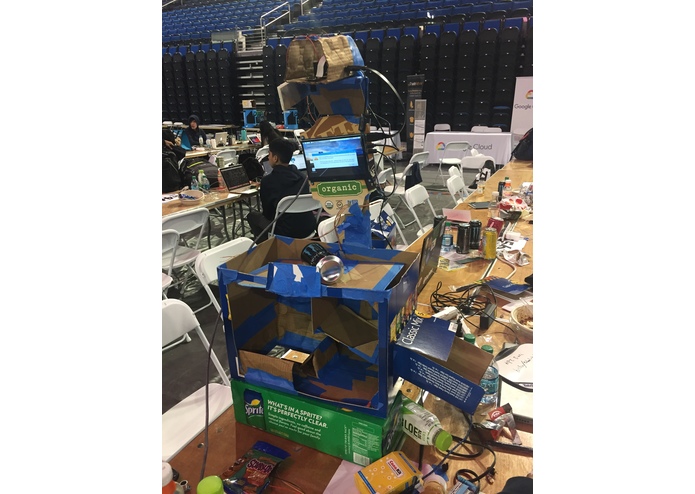
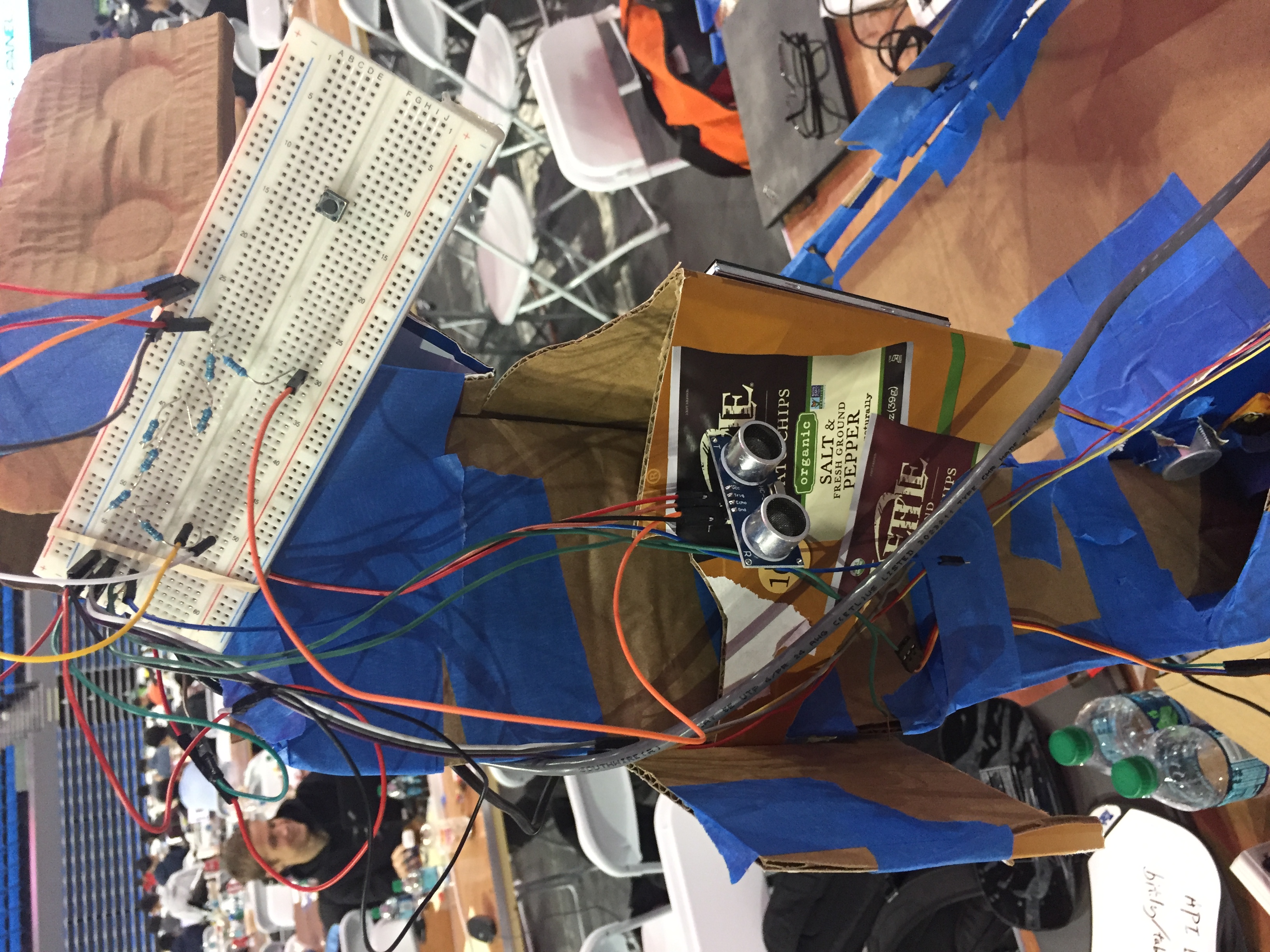
The litter filter system.
-
-

-


Inspiration
Each year the world generates 1.3 billion tons of waste and that number is expected to soar to 4 billion tons by 2100, according to Ede Ijjasz-Vasquez, senior director for the World Bank's Social, Urban, Rural and Resilience Global Practice [1]. Nine-tenths of all solid waste in the United States does not get recycled and landfills are among the biggest contributors to soil pollution. To make matters worse, roughly 80% of the items buried in landfills could be recycled [2]. Although 75% of America’s waste is recyclable, we only recycle around 30% of it and 9 out of 10 people said they would recycle if it were “easier” [2].
There are billions of dollars wasted each year on improper recycling in the United States alone and based on the statistics people are inclined to recycle if it is made easier. By creating a product such as Litter Fitter, it is easy for consumers to place this over their existing garbage and let machine vision do the sorting. This would greatly improve the amount of recycling and improve the state of existing landfills to accommodate the growing population.
What it does
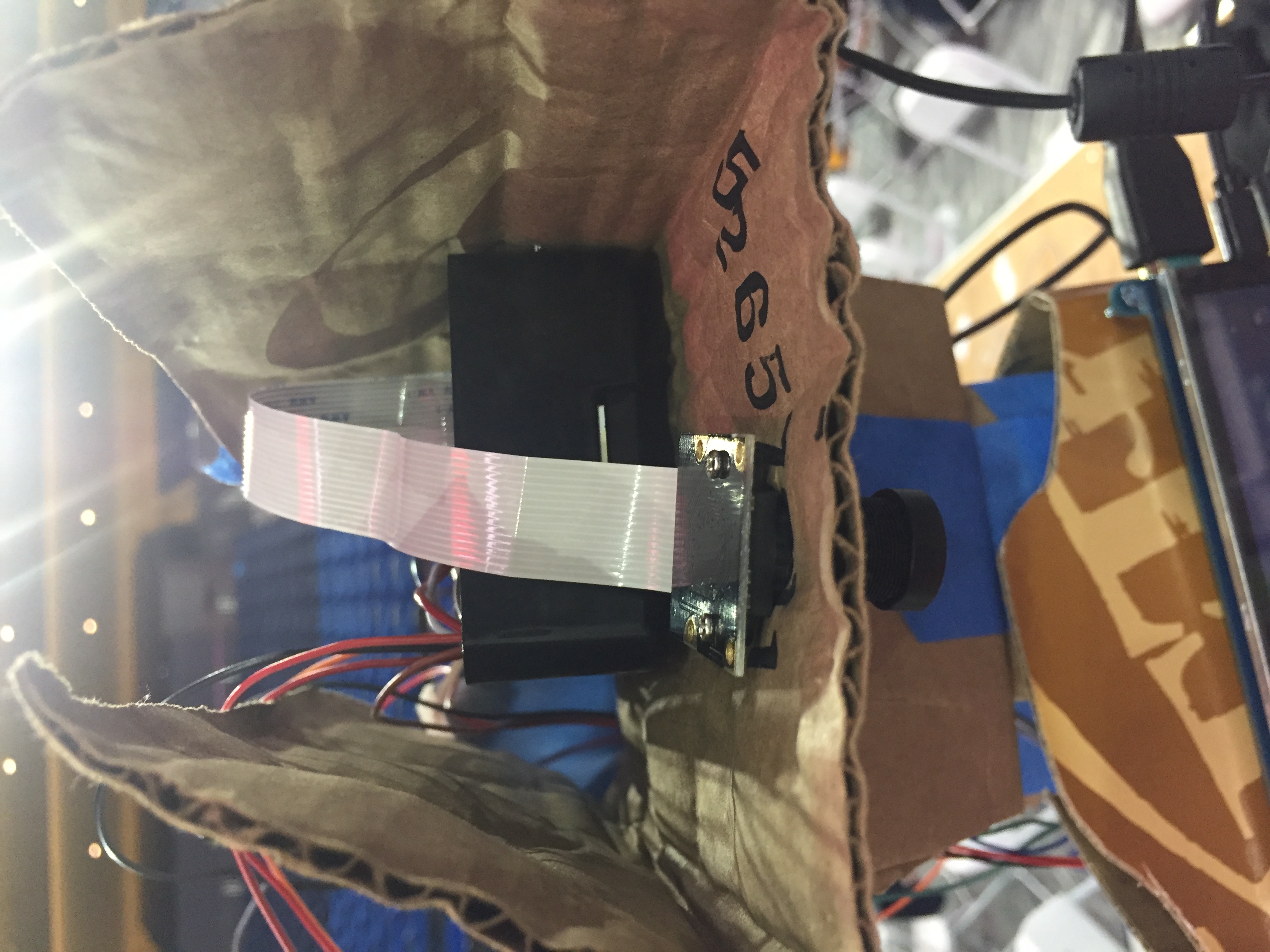
The Litter Fitter is a small container that is placed over existing garbage bins to help with sorting. It has a mounted camera and sensor which detects and analyzes trash by saving an image on the Pi, sending it to the Google Cloud vision API which determines what kind of recycling the object is. The Pi can then get an output from the API to determine which way to spin the servo motor. The servo motor can then turn the sorting lever left or right depending on the type of waste.
How we built it
The project was built by splitting it into three main categories: Google Cloud API, Raspberry Pi Hardware, and Frame Creation. The Google Cloud API was learned by viewing online tutorials and downloading all necessary libraries which were then run on Linux. The team was able to take pictures of various items that go into the garbage and test the validity of the machine learning algorithm. The next category, raspberry Pi hardware, was built by first connecting the Pi to an external laptop through an application called PuTTY. The camera was then attached and code was written to see if an image would be saved onto the Pi. Once this was completed, the motion sensor was added and the python code was modified to see if the camera would take a picture when motion was detected. Lastly, the whole project was attached to the frame which was created using cardboard. The wires were reconnected and routed through the back letting the final product do its job uninterrupted.
Challenges we ran into
With every project there are a few challenges along the way. This project had issues during the beginning when trying to setup a connection from the Pi to the desktop. A few tutorials were used to help move this process along. The same problems happened when trying to use and understand the Google Cloud API. Some documentation seemed to be missing and was inherent knowledge to some but not to others. Trying to figure out these missing gaps by watching more online tutorials was the key to overcoming this problem. The main hardware challenge was getting the servo motor to run with the Pi. The load of the cardboard sorting lever was too much for the initial servo motors and as a result the motor could not return to its initial position. Double motors on each side were then used but this resulted in a short circuit of one of the motors because of uneven power distribution. In the end we decided to use a larger stepper motor to try and lift the lever.
Accomplishments that we're proud of
We were able to accurately categorize trash using label responses from Google's vision API remotely from a Raspberry PI. Building a working physical demo.
What we learned
The team learned about the Google Cloud API and its amazing features which are mostly open to the public. The transferring of files between the API and Pi using HTTP was a new task some of us never learned before. We got familiar with interfacing the Raspberry Pi with hardware components such as the step motor, camera, and ultra-sonic sensor.
What's next for Litter Fitter
Litter Fitter will continue by creating a final working prototype with hidden hardware so it can safely be used in all public areas. The software will be updated to be more accurate and better hardware will be mounted to the unit. The team will work on creating an application to track the large amounts of data so recycling programs can be improved. This includes incentivizing recycling by allowing application users to earn credits upon scanning their QR codes before disposing of bottles and cans.
References
[2] https://www.rubiconglobal.com/blog-statistics-trash-recycling/
Built With
- google-cloud
- putty
- python



Log in or sign up for Devpost to join the conversation.