Inspiration
We are very passionate about biking, hardware and embedded systems. Last summer, we tried to get around Seattle with our bikes and had to stop every 2 min to look at our phones for the instructions from Google Maps. Having the sound is dangerous, and having the phone out could lead to it falling. Thus, we decided that a simple display that shows you where you need to turn next (how far away and in which direction) is the best way to simply get the information and not be distracted.
What it does
It calls the Google Maps API and gets a list of moves to get from your location to your destination. Then, it will show on a series of LED arrows, the moves that you need to follow, and it will track your location to tell you when you need to turn. Example: If your next move is to turn right in 900 feet, it will display the number 900 on the 3-digit display and it will light up the right arrow. As you approach, the device tracks your location and updates the number of feet you have until the turn. Once you pass that turn, it will go to the next move.
How I built it
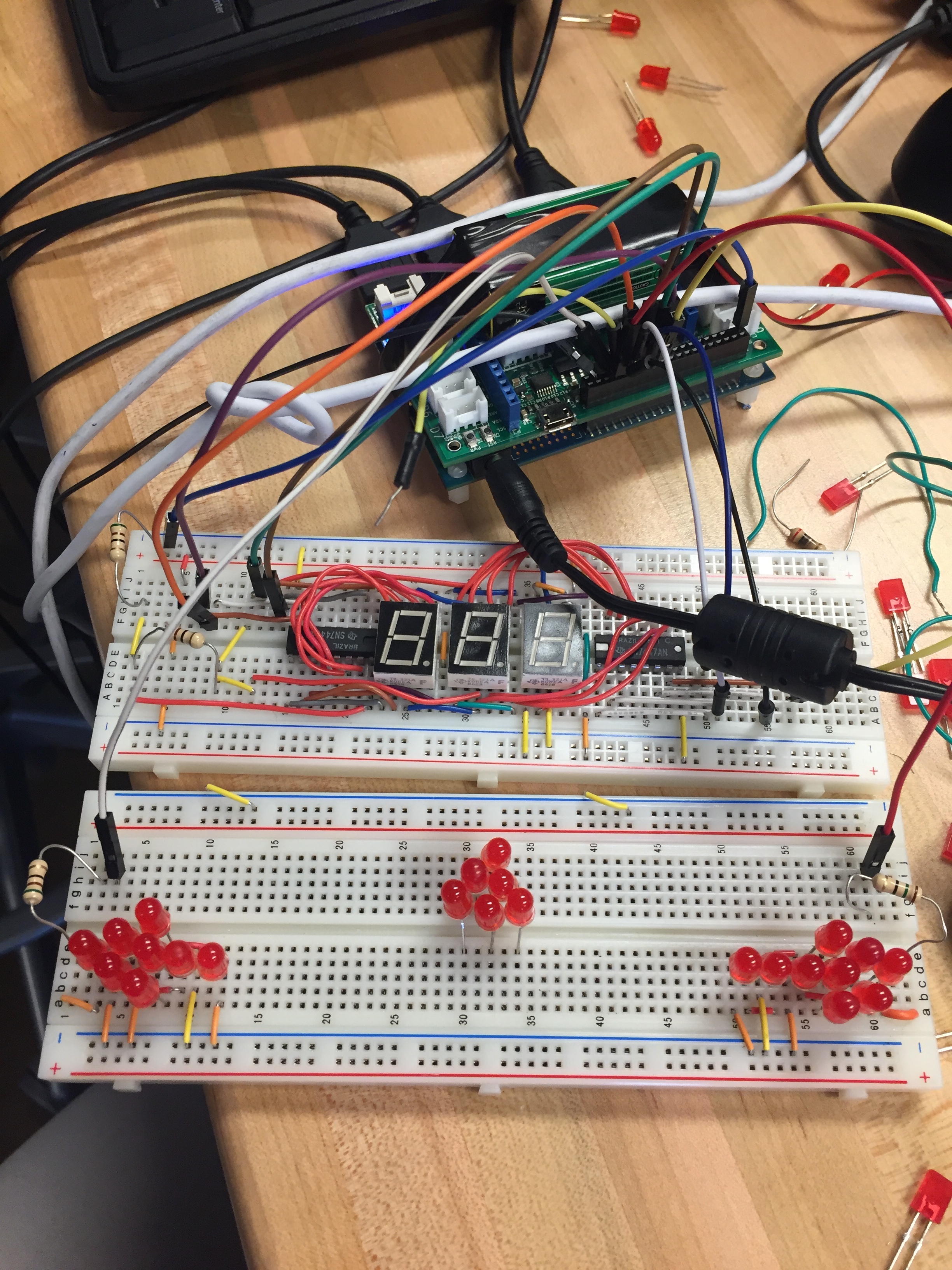
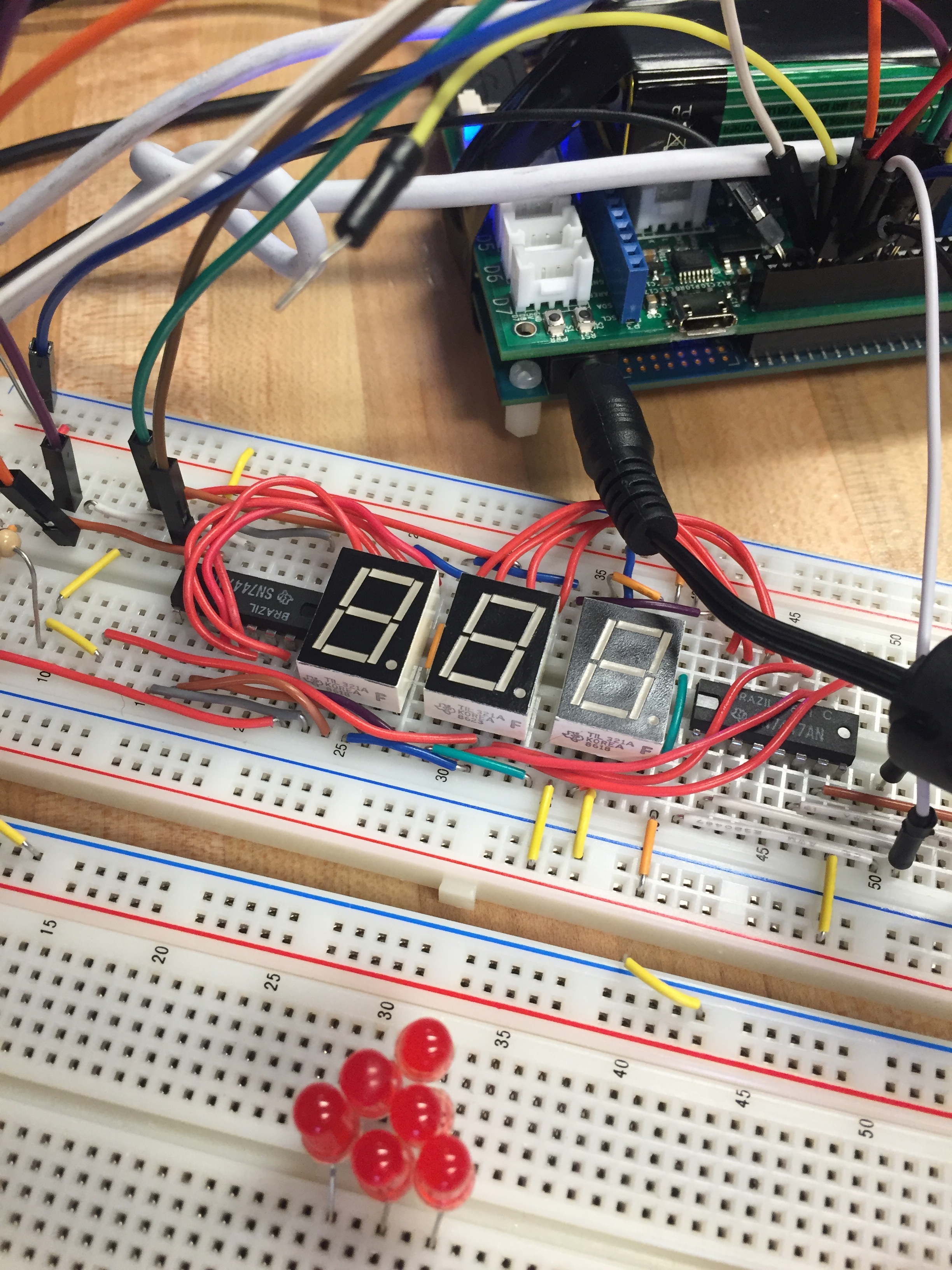
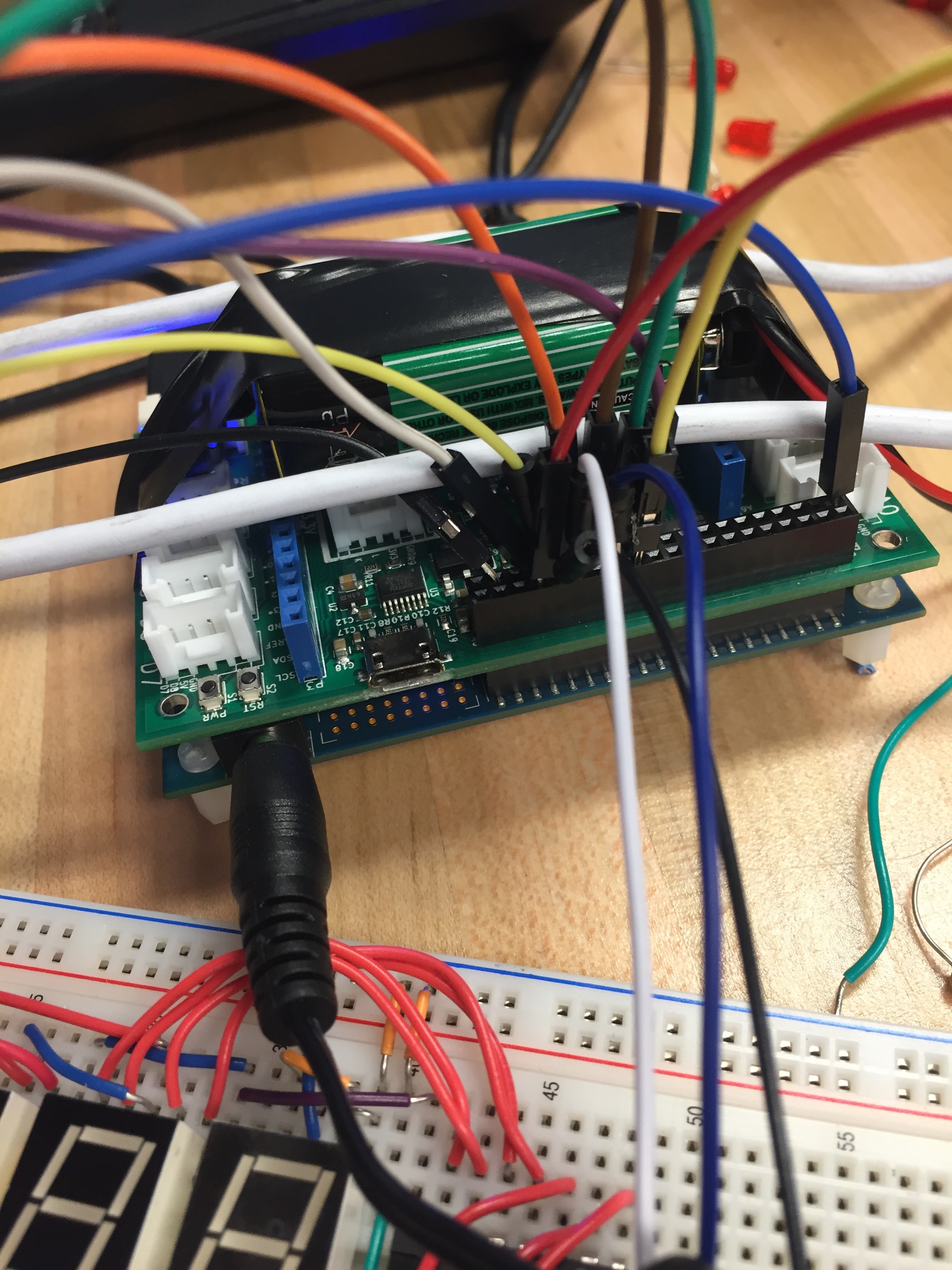
Using hardware from the lab and a lot of patience! We used the Google Maps API and set up a server and client on the Qualcomm board. The board has the program that calculates the distance until your next move, using GPS, and will output this information via its 11 pins, which will go through a complicated circuit using two 74LS48 chips to get to the LEDs and the 3-digit display.
Challenges I ran into
The Qualcomm board only has 11 pins, so we had to minimize the number of outputs we could get from it, by optimizing the circuit. We represented the distance in binary and converted this using gates and chips into a 3-digit display. It was also a challenge to set up the Google Maps API and the server and client on the Qualcomm board.
Accomplishments that I'm proud of
Minimizing the circuit to only 11 output pins, when we started thinking that we needed 33. Setting up the Google Maps API. Learning Python. Understanding how the Qualcomm board works.
What I learned
Python. Set up of a Qualcomm dragon board 410. Setting up APIs. A LOT about hardware, chips and circuitry.
What's next for LionBike
Achieving fully autonomous battery for the Qualcomm board. Having a more appealing display of the information to the biker. Adding other functionalities such as safety considerations for bikers. Basically things that we were not able to achieve because of the limitations with the hardware.
Built With
- google-maps
- leds
- python
- qualcomm-dragonboard-410
Log in or sign up for Devpost to join the conversation.