-
-
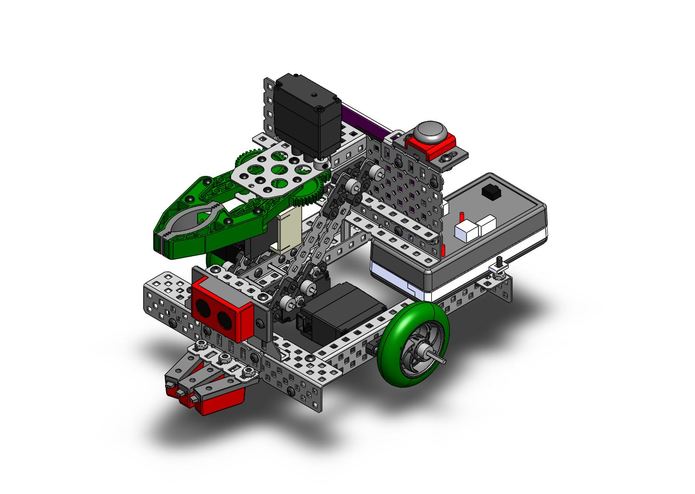
SolidWorks Model
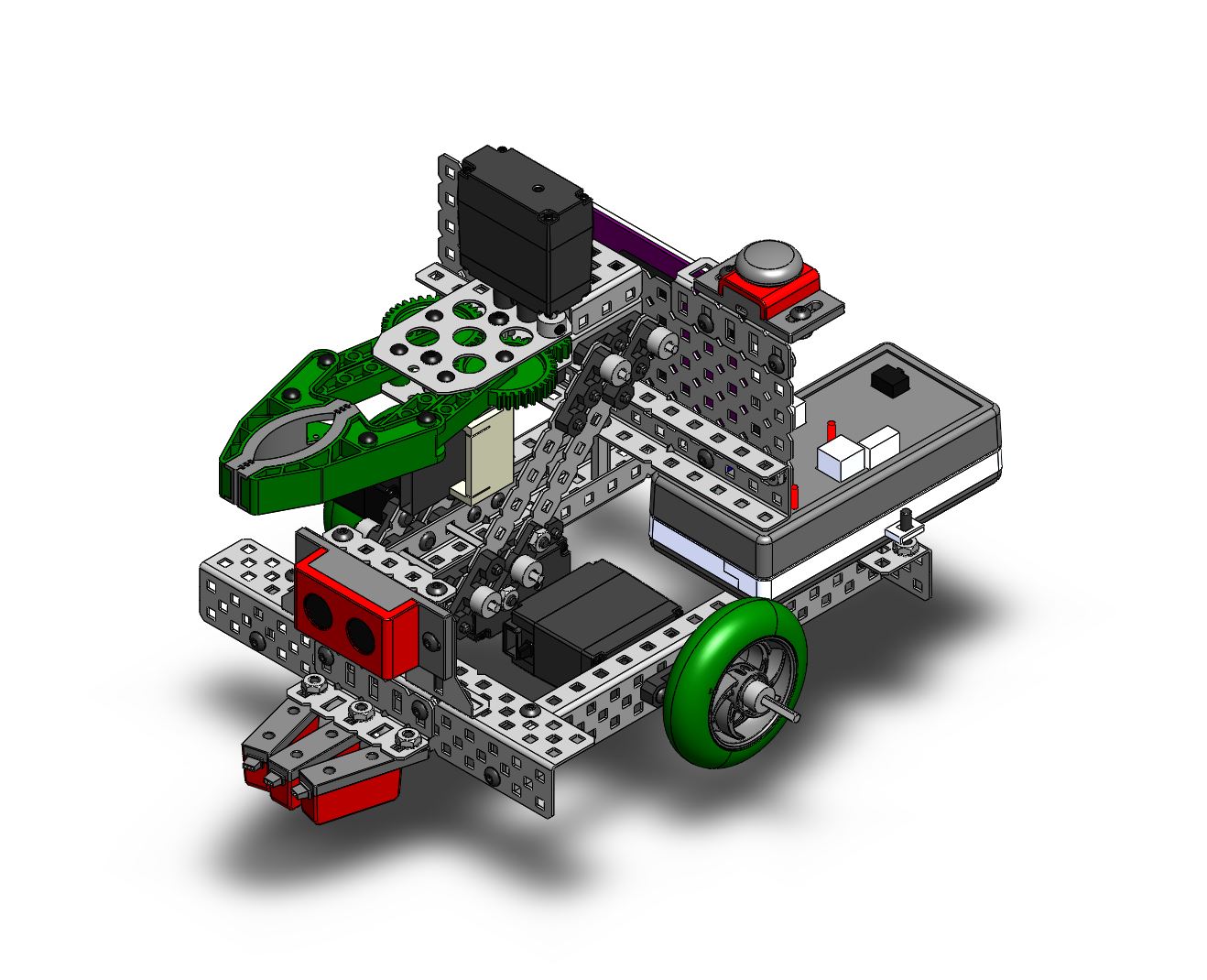
Line-Tracking-Robot
Second year Mechatronic Design project. Built and coded a line following robot that has a retractable arm to pick up objects.
What I Learned
I have used Arduino's before in mechatronic systems, taking information from the environment and to make decisions. However I have never built something this complex, measuring so many parameters, to execute more then one task autonomously. I learned how to use ultrasound sensors, line tracking sensors, encoders and light sensors. Using this information it allowed to Robot to finish the course as seen in the video


Log in or sign up for Devpost to join the conversation.