-
-
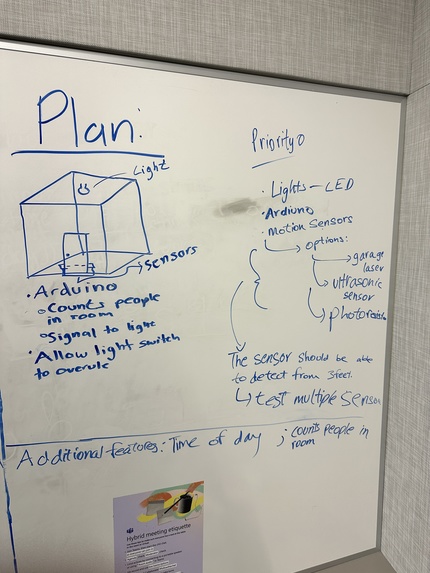
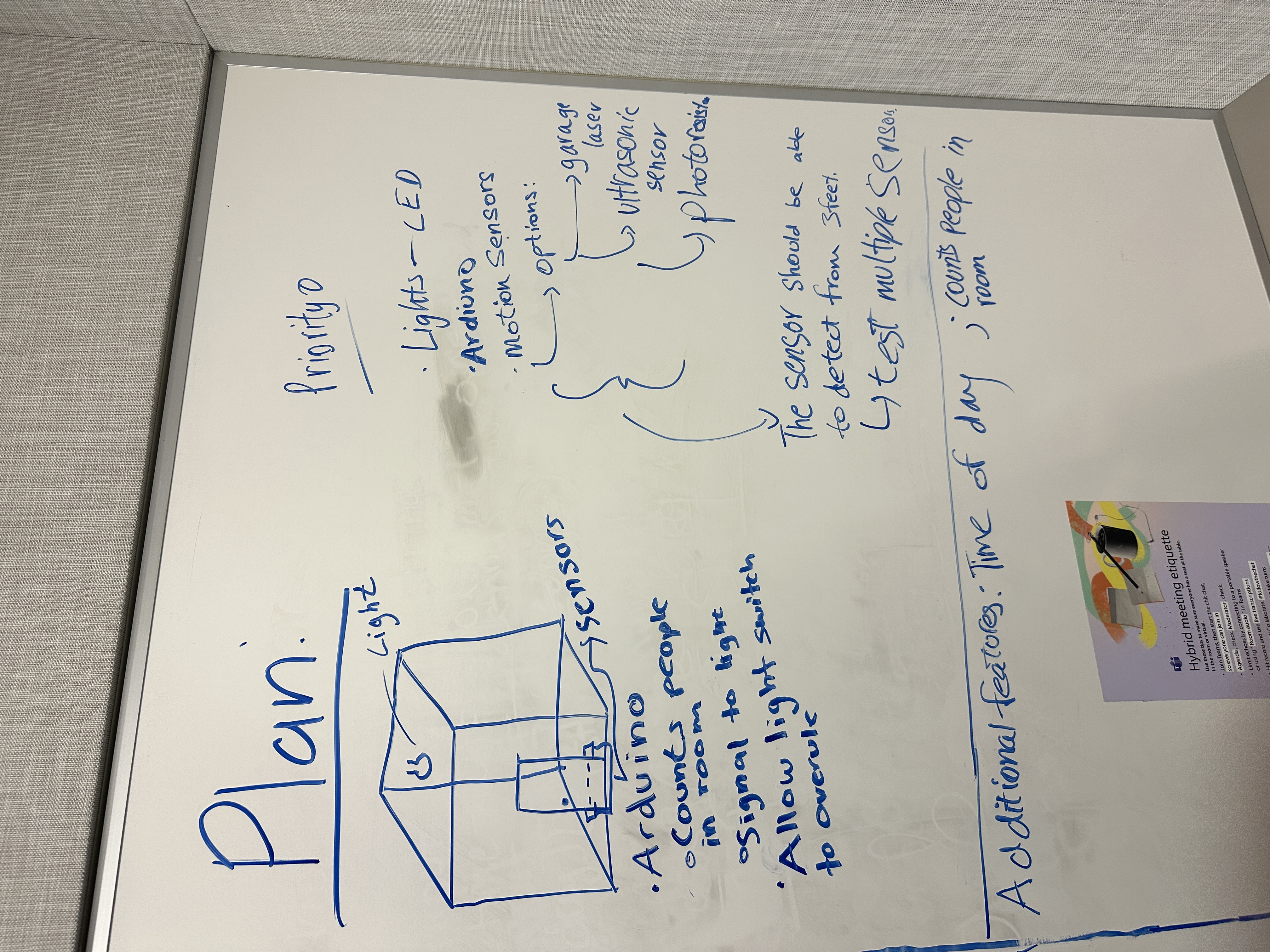
Our brainstorming thought process and plan.
-
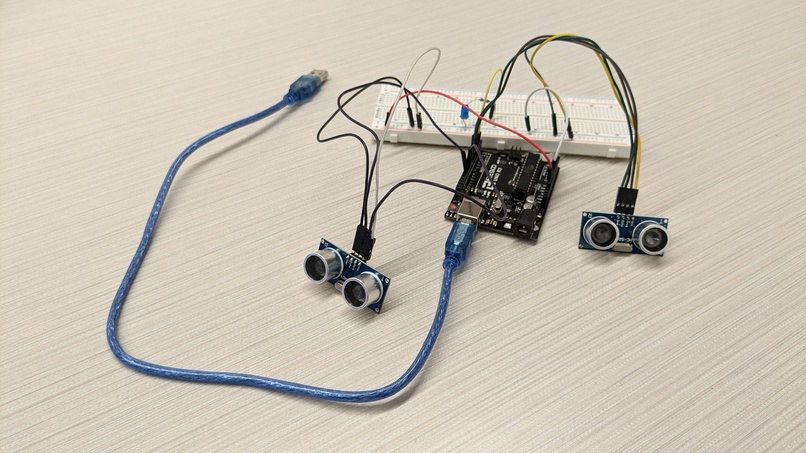
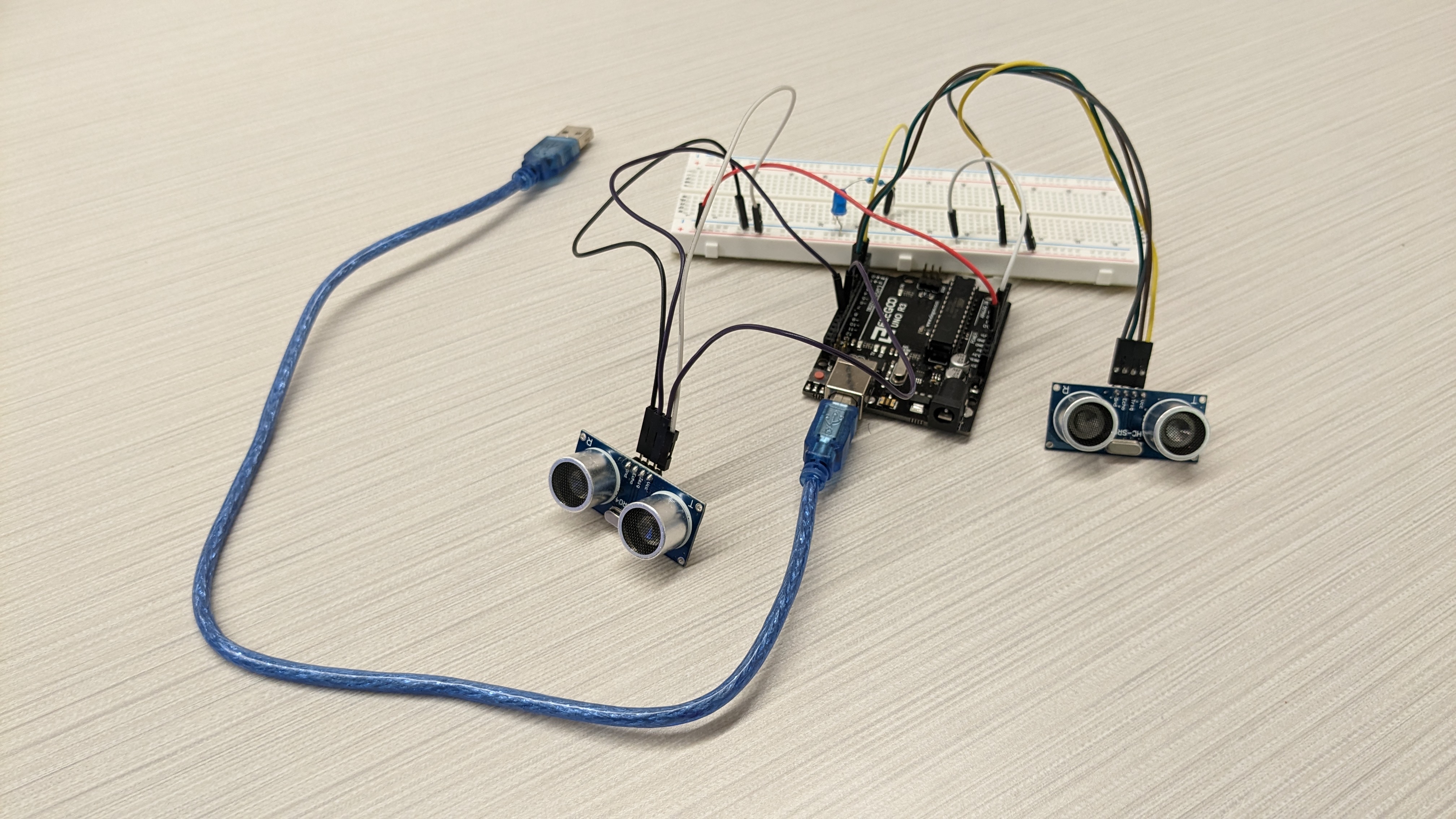
Ultralight sensor with ardiuno and breadboard
Inspiration
We looked at daily tasks of humans as they are the most beneficial to be automated. We then picked the most repetitive task because there is a greater chance that people would need them automated.
What it does
We made a machine that detects occupancy in a room using ultrasonic sensors and toggles a light between on/off.
How we built it
We used an Arduino Uno R3 and 2 ultrasonic sensors and an LED with resistors and a breadboard. We initially simulated the system using python to experiment with different logics and theories. This also enabled us to add complexities without having to do too much complicated work.
Challenges we ran into
Out primary issue was our hardware probably knew a certain mouse the way it was acting goofy. The mechanical buttons for our Arduino had a lot of bounce (switch not working to perfectly close circuit). We solved this by switching to ultrasonic sensors because they were more accurate to recreate a real-life application and were simpler to code and implement.
Accomplishments that we're proud of
We are proud of being able to achieve the final outcome and persevering through difficulties. It was also our first time working together as a team and we are proud of our chemistry. Our problem soving capabilities were also tested and we are proud of out ability to counter our issues.
What we learned
We learned how to use Arduino and join hardware with software. We also learned how to notice user errors and how to plan for adversity for the machine.
What's next for Light-tronic 3000
We plan on putting the sensor and occupancy detecting capabilities as a part of more projects.

Log in or sign up for Devpost to join the conversation.