-
-

Isometric View
Inspiration
We found cats chasing lasers amusing and wanted to replicate that behavior with a robot.
What it does
The robot attempts to catch the light by following it.
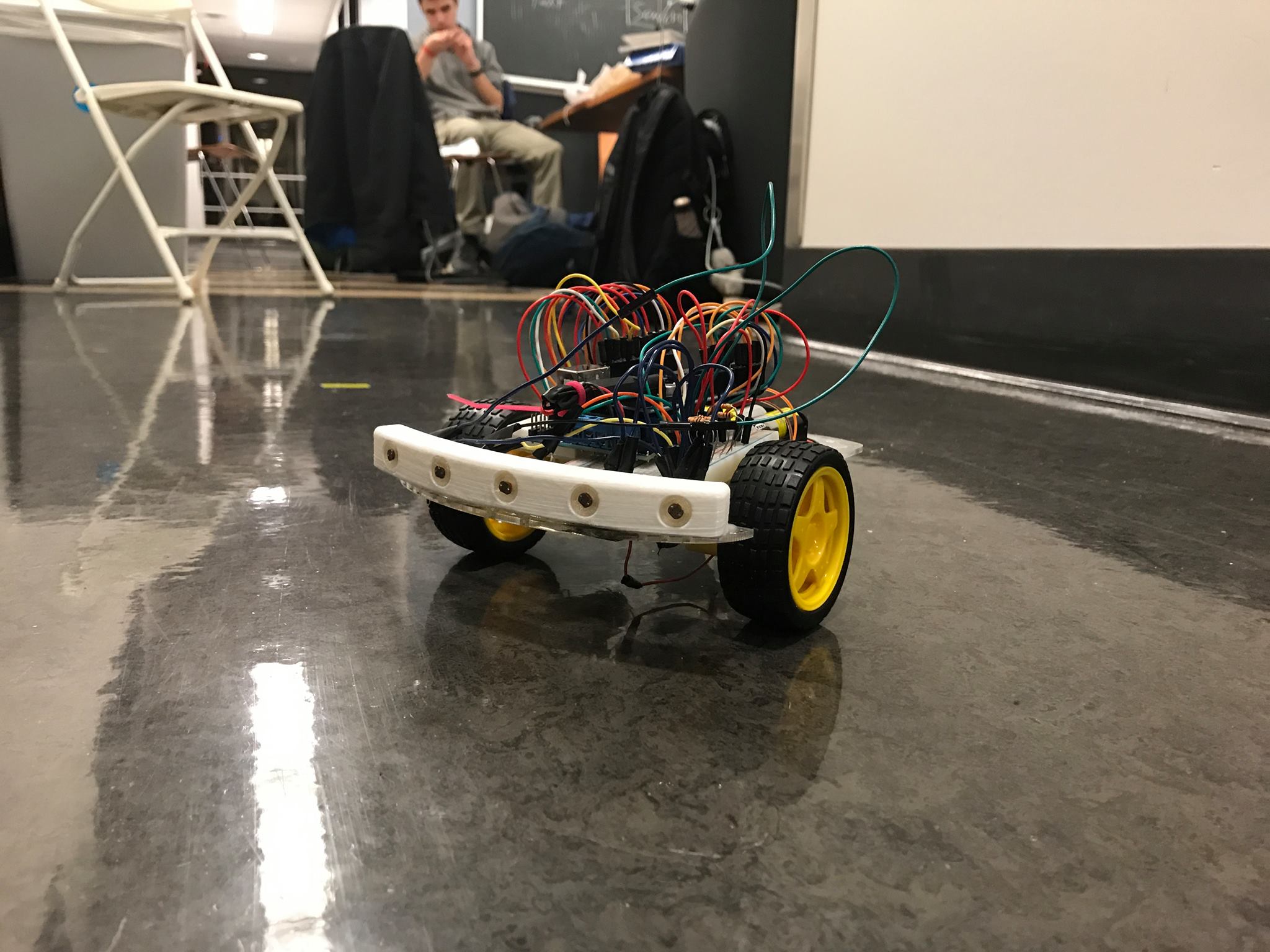
How we built it
Laser cutters were used to cut the chassis of the cart. Off the shelf electric motors and driver components move the robot and provide processing power. The robot uses a weighted average (i.e. center of mass calculation) to determine positioning of the light relative to the robot.
Challenges we ran into
The gearmotors used had binding issues and only worked well at high duty cycles. This made having precise control difficult, which affected decisions related to the driving algorithm. The robot also needs to be tethered for its code to run correctly.
Accomplishments that we're proud of
Having a finished product given the wide range of experiences on the team.
What we learned
How to write code for Arduino and use photocells and ultrasonic sensors.
What's next for Light Chaser
Adding some sort of PID to eliminate the oscillatory behavior of LightChaser. Add some obstacle avoidance behavior.
Built With
- 3dprinting
- arduino
- laser-cutting

Log in or sign up for Devpost to join the conversation.