-
-
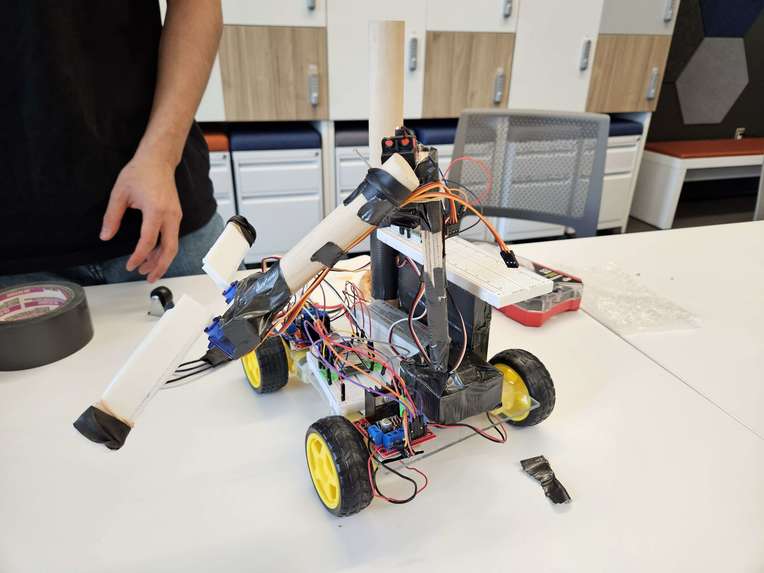
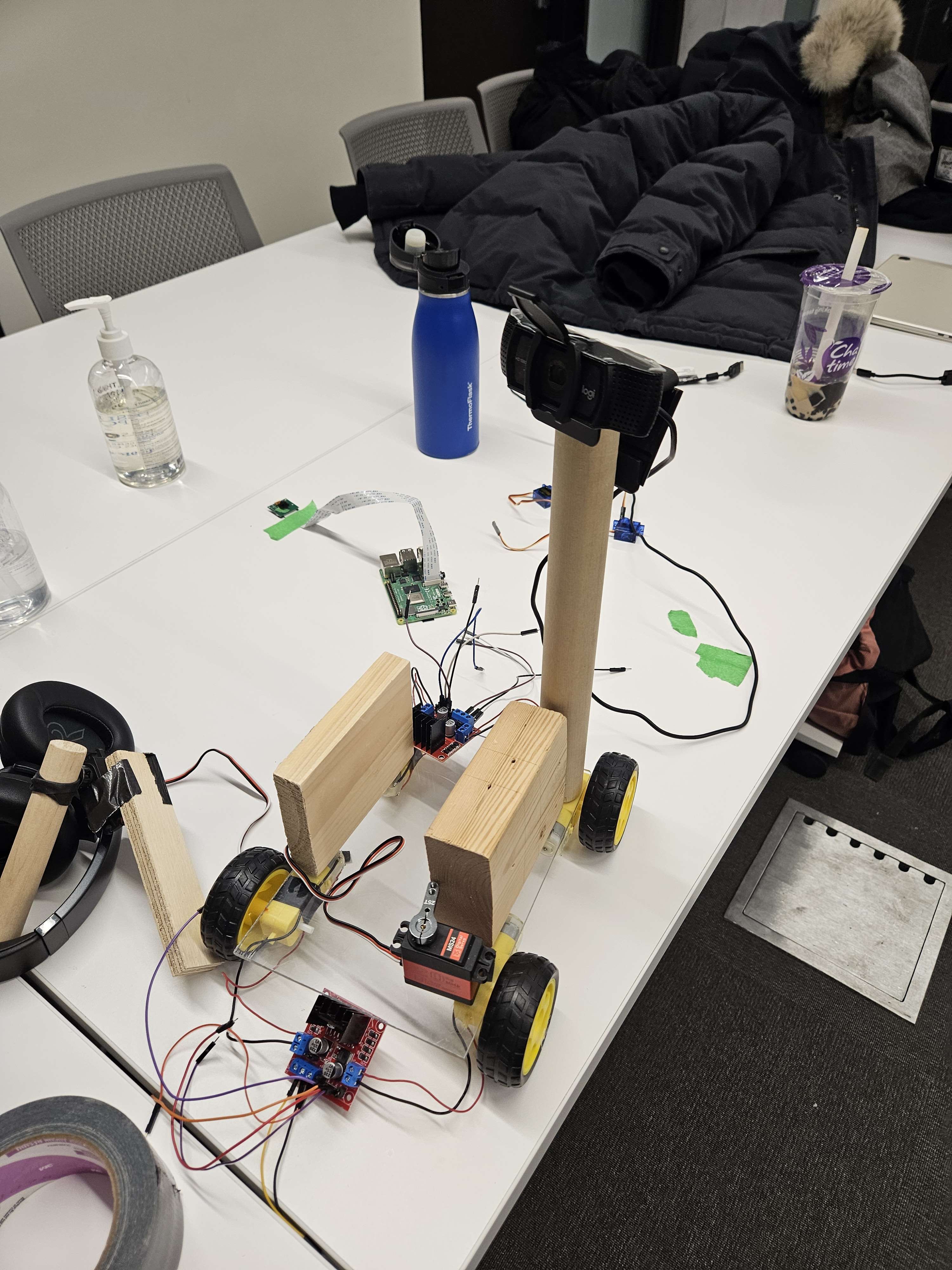
Almost finished, missing webcam, but all servos working
-
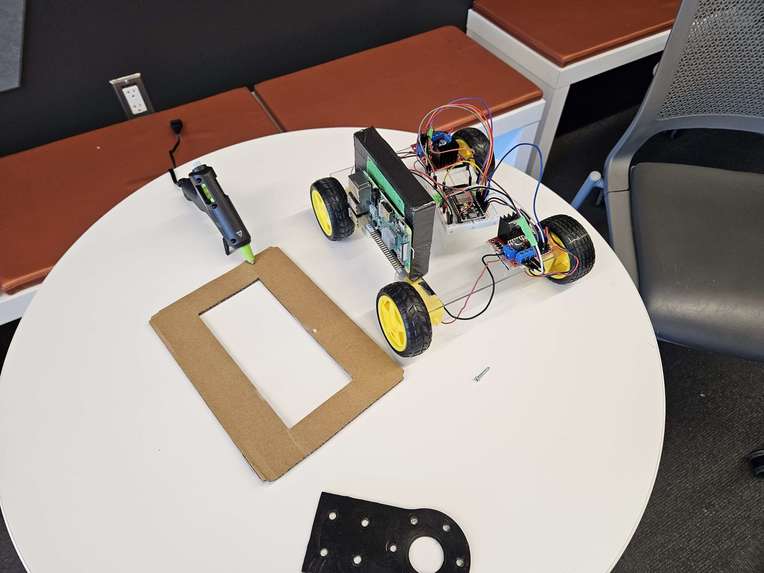
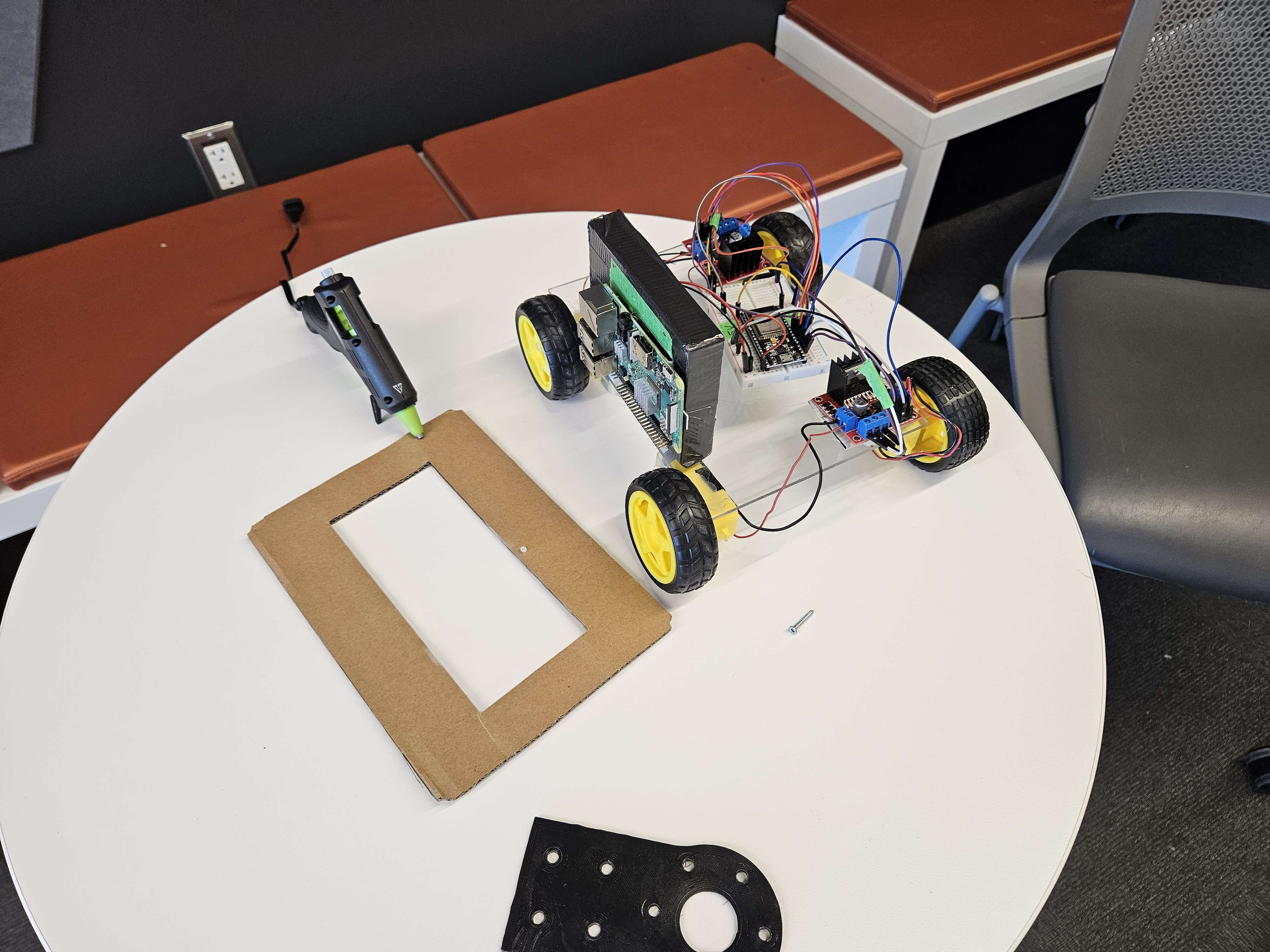
Car assembling
-
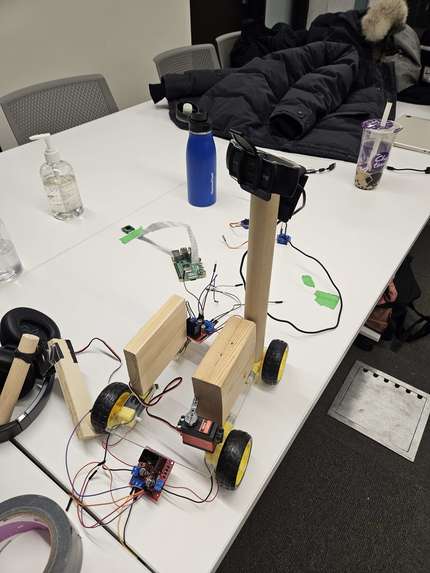
Initial camera mounting setup
-

Servo debugging
-
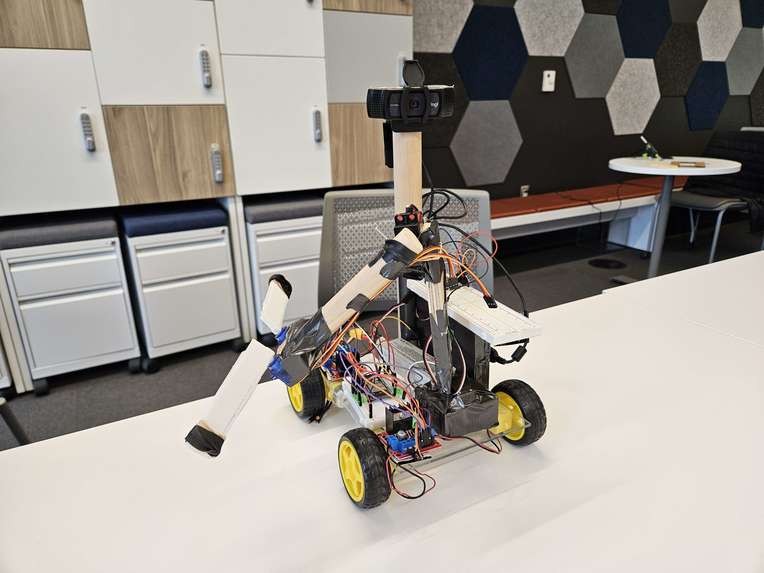
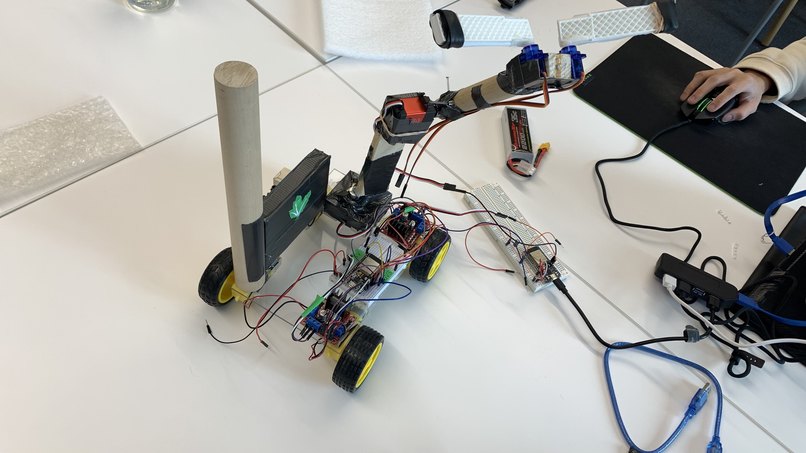
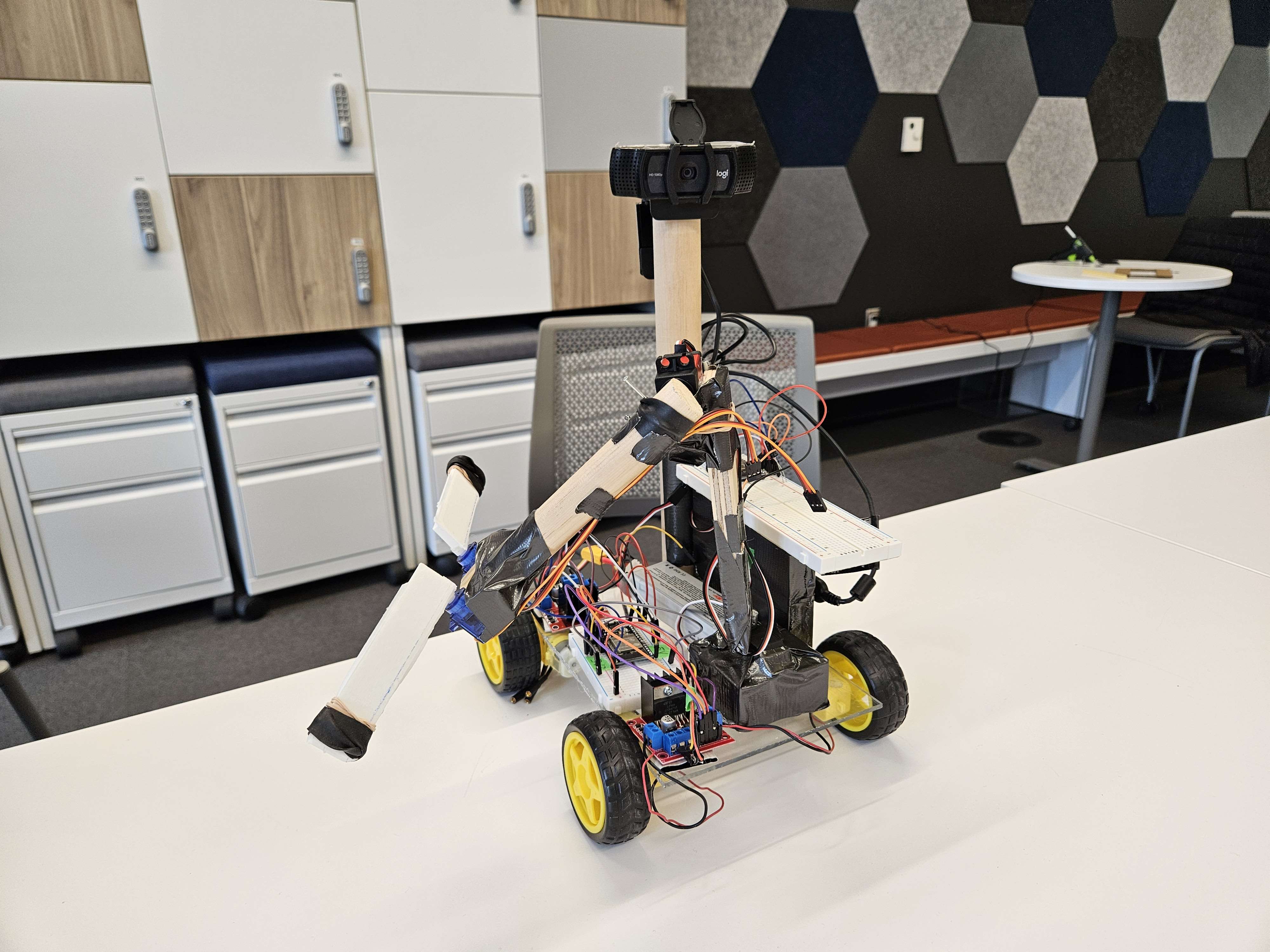
finished, all parts working
-
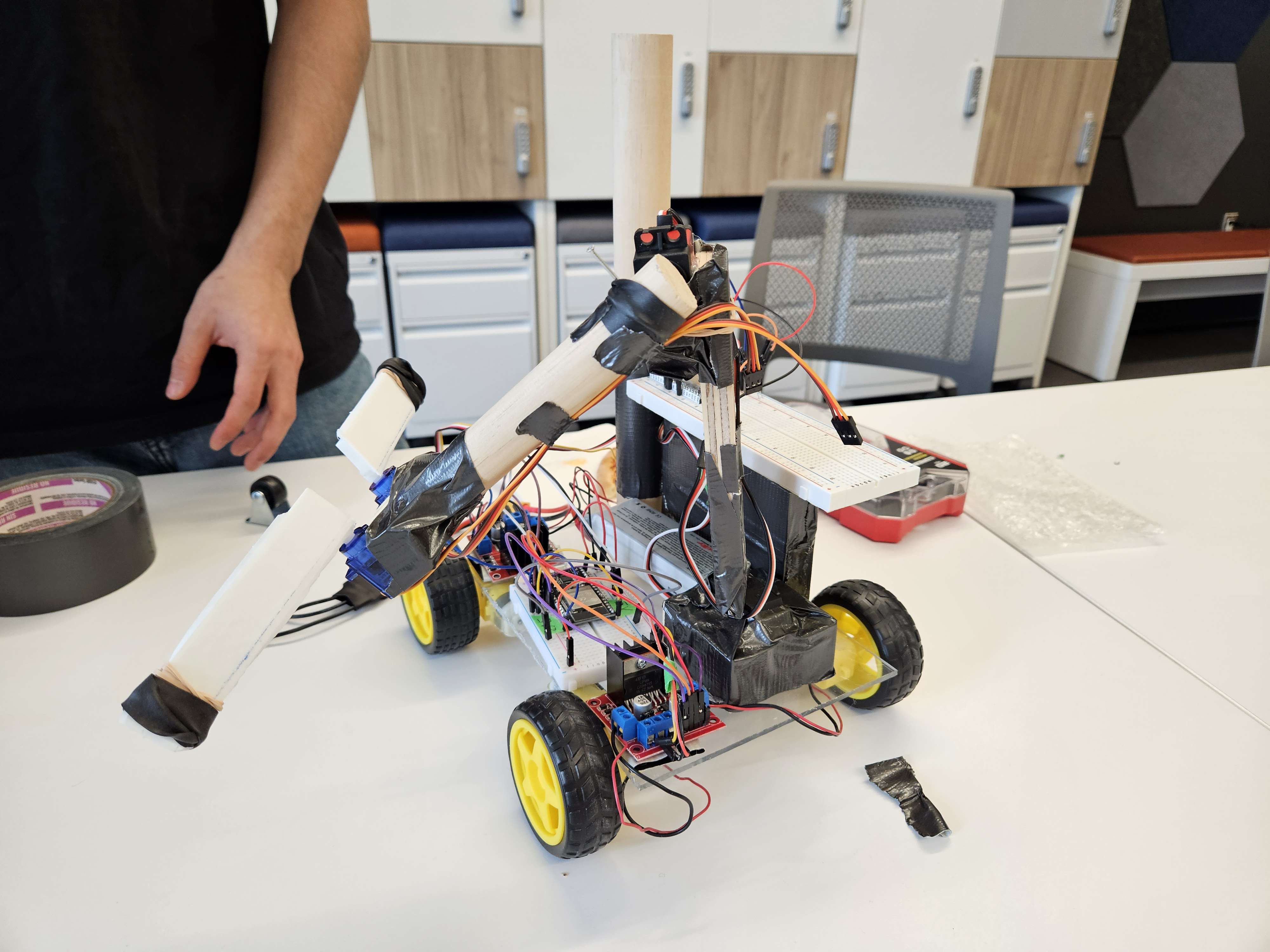
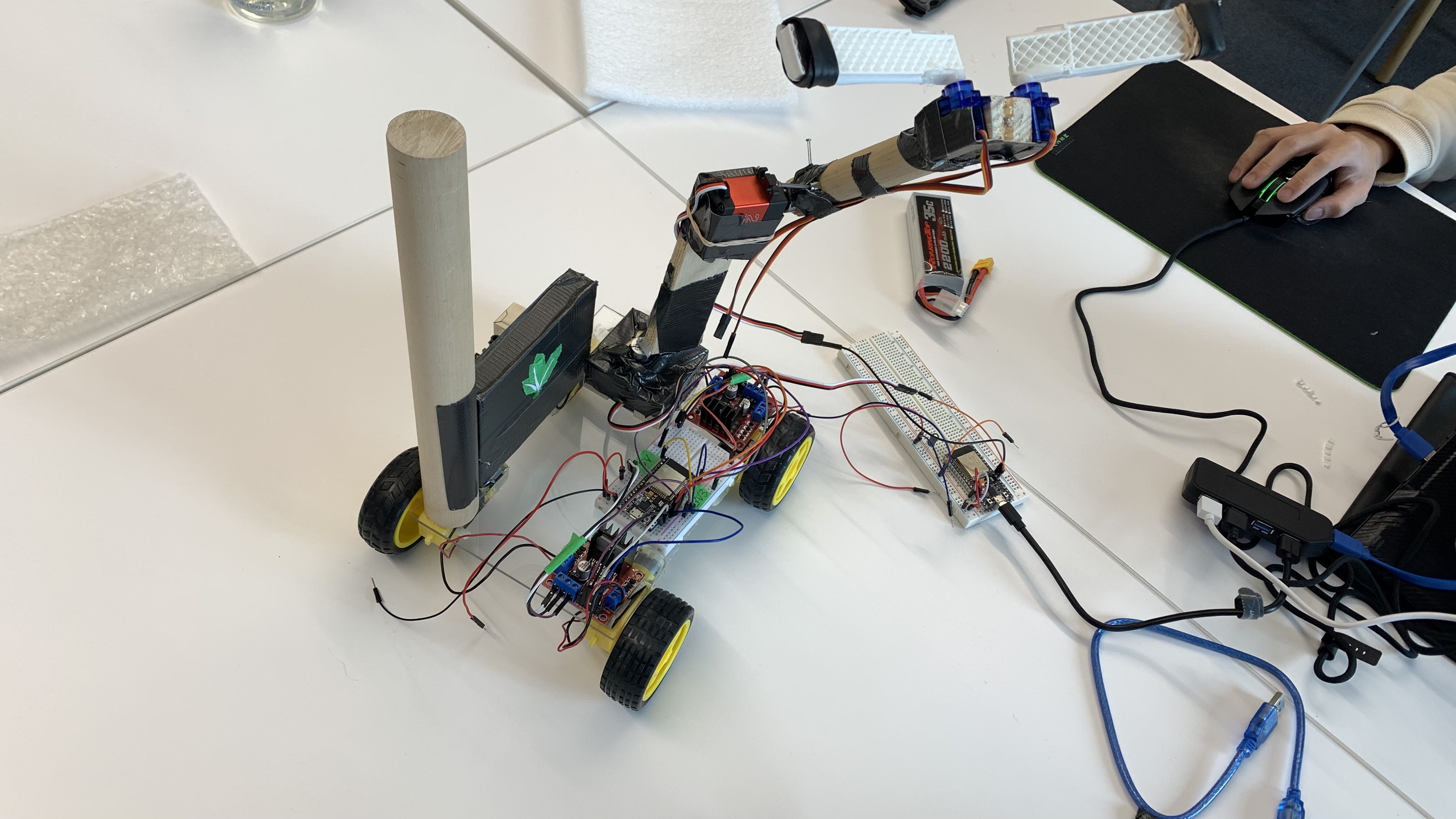
Another Angle
-
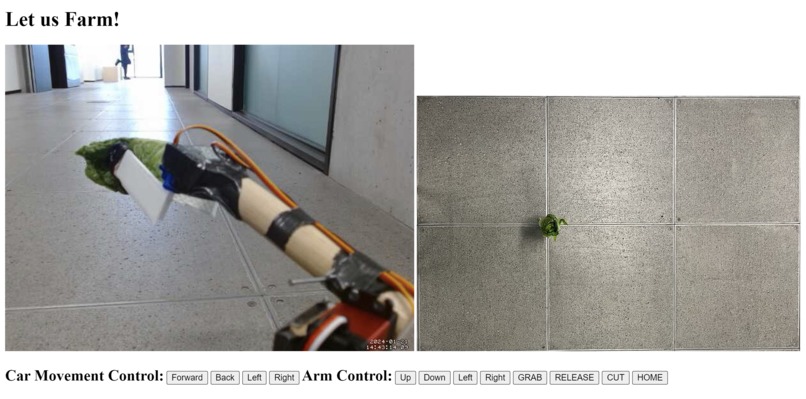
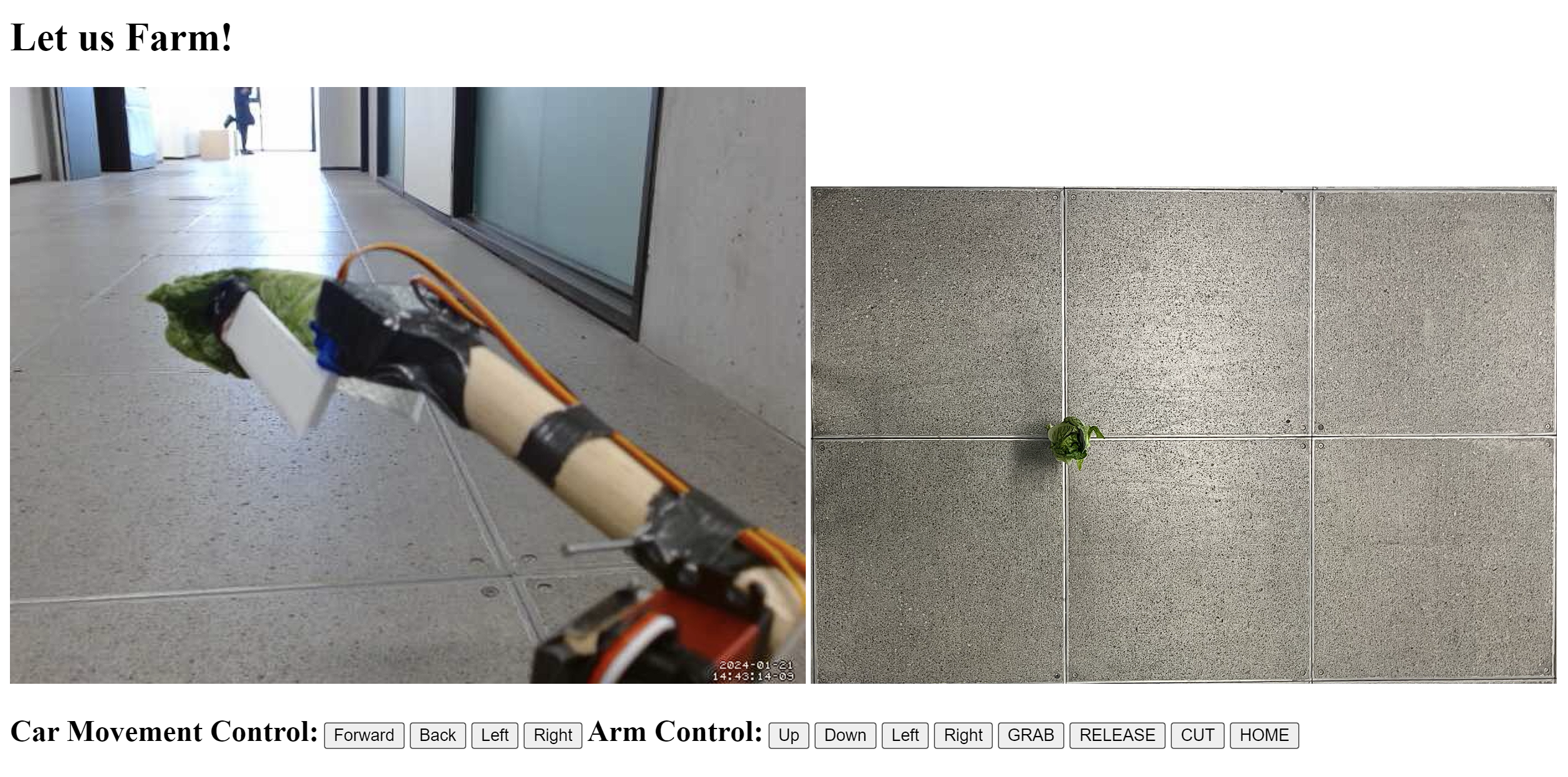
UI

Inspiration
Sustainable farming of leafy greens has a significant positive environmental impact and increases food security around the globe. We want build a robot that allows high-efficiency farming and increases quality of life for vegetable farmers.
What it does
It's an autonomous rover that gets sent out into the crop field at a selected location from a web-based mini-map, picks up a sample crop from the desired location, contains it, then routes its way back to home base for inspection and crop evaluation. With large area farms in North America (average farm area of > 2 square km, it can take a significant time for farmers to get samples of their crops. With our robot, the farmer can set it to sample at a selected location, and then go grab coffee or do other work. When the farmer comes back, the robot will be on location ready to sample and return.
How we built it
We are using an ESP32 for rover movement (4x DC motors), arm control (2x servos), and grabber control (2x servos). Our 3 joint arm and grabber allows for high crop gathering dexterity and fine tuning, with a Raspberry Pi for live video feed.
Challenges we ran into
Figuring out how to tune the motors so it ran as intended Figuring out how to connect to the robot wirelessly, and control it wirelessly Figuring out how to move the arm for crop gathering dexterity
Accomplishments that we're proud of
Getting the robot to connect and move wirelessly, with live video feed. Building our 3 joint arm and grabber. Being able to grab lettuce.
What we learned
How to get a robot to move wirelessly using a microcontroller How to drive multiple high current servos with LiPo batteries and ESCs.
What's next for Let us Farm
Add more dexterity functions, automations, and machine vision capabilities to autocorrect its course. Add IMU, GPS, and extended Kalman filtering for accurate localization and mapping capabilities.
Built With
- esp32
- python
- raspberry-pi





Log in or sign up for Devpost to join the conversation.