Our team came together during the team building event at the hackathon. Instead of discussing ideas to build, we just talked and made jokes. In the end, we ended up as a team with no idea what to build. We decided to work with the Intel Edison after the workshop with the Mashery mentors. Still stumped with what to build, we slowly compounded ideas that involved our diverse skill sets. Our team of two hardware hackers and two software hackers built a robot car that drives using gestures from Leap Motion. We're proud of the communication we established between the python program on the Leap Motion machine and the Linux distribution on the Intel Edison.
Leap Wheels
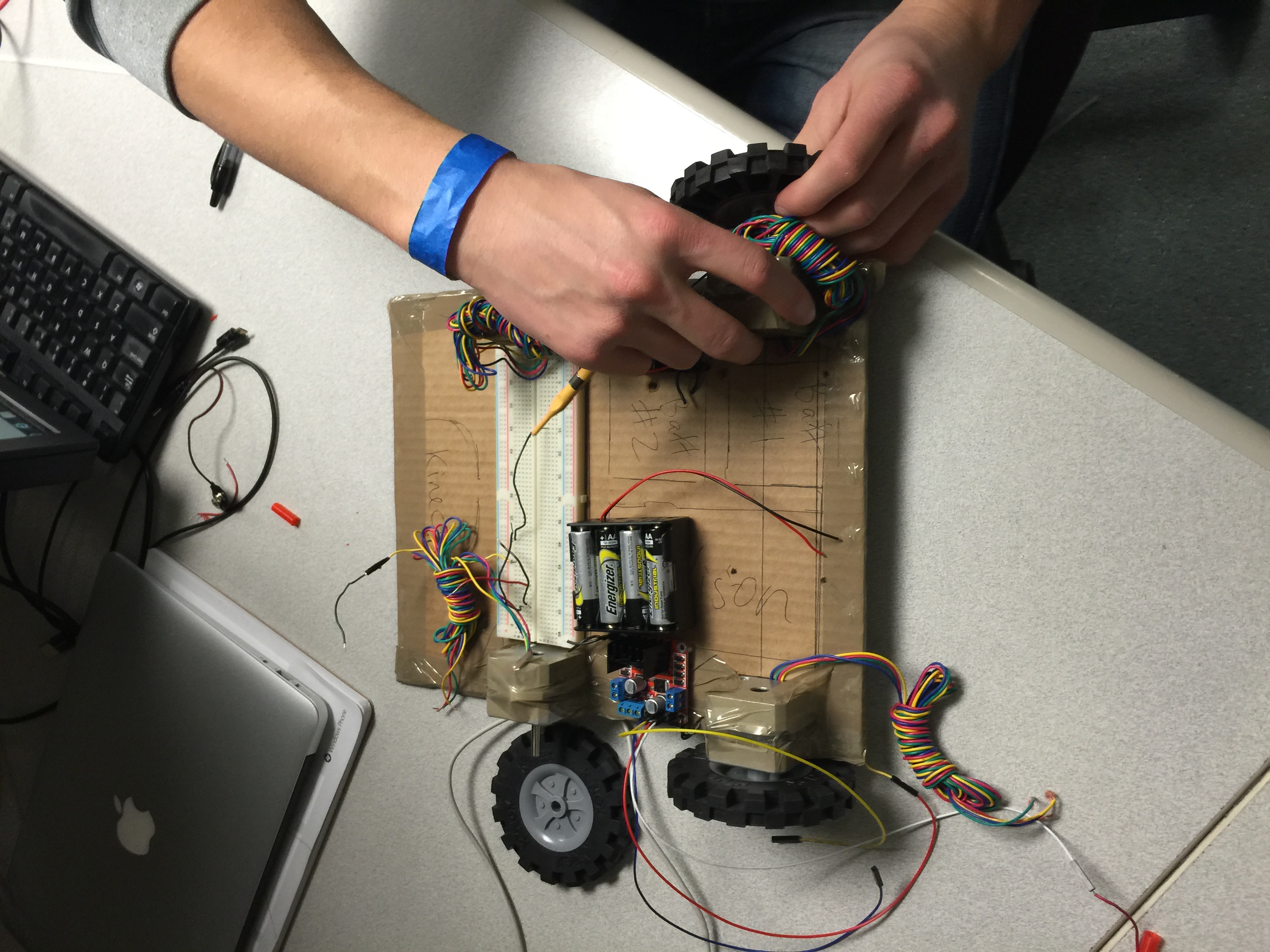
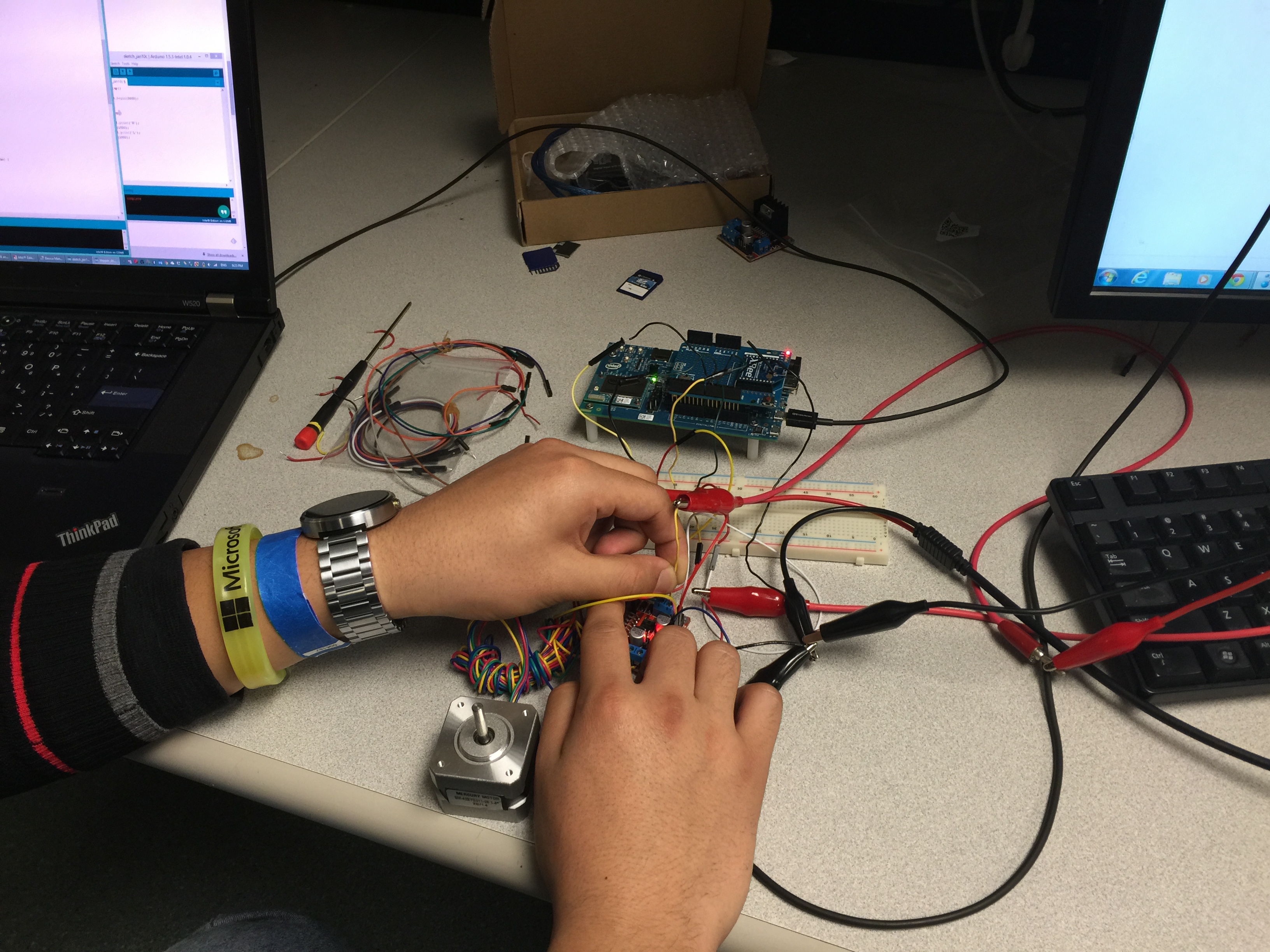
Use leap motion with Python to control the motion of a mini-car run by an Arduino attached to an Intel Edison chip.
Updates

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.