-
-
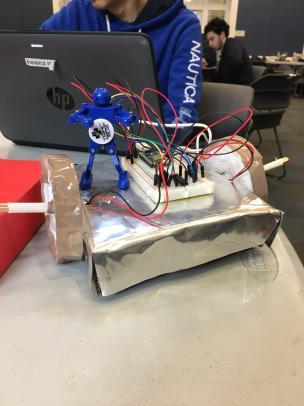
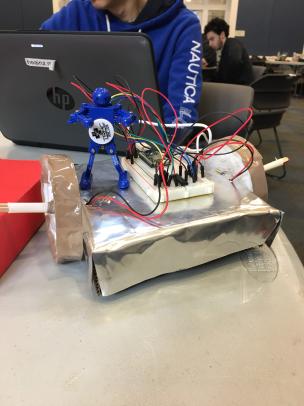
Our robot chassis, built from recycled aluminum trays, coffee lids, cardboard, straws and a LOT of tape
Inspiration
Our team of four is from Livingston, NJ, and we are all part of a high school robotics team. Because of our prior experiences in programming and building robots, we wanted to experiment with a combination of hardware and software for our TCNJ project to create a drivable object. We chose to use leap motion because it looked cool and we wanted to interact with sensors. We chose the sparkfun kit because of our familiarity with it and to power our robot.
What it does
Ideally, the robot is supposed to move in accordance with your hand-movements at a constant speed. Swiping gestures will make the robot turn in the direction of the swipe and a pushing motion forwards or back will move it in either direction.
How we built it
We used a photon board and an H-bridge to power the motors and left-over materials from lunch and dinner to build our robot platform.
Challenges we ran into
We had to improvise with the variety of materials we were presented. Because we didn't have any wheels or a premade platform. We scavenged around the building for useful objects and managed to construct a drivable robot that is capable of sustaining its own weight. We struggled with fortifying the connection point between the motor axle and the wheel because it kept falling off. Eventually, we wrapped the axle around with tape so it fit snuggly.
We also had several issues with transferring the data we received from the leap motion to the sparkfun because we had to figure out how to convert between string values and json format. Because we were using HTTP requests, we also had to disable the computer's firewall.
Additionally, the databases between the two computers transmitting data was not in sync and kept creating errors.
Accomplishments that we're proud of
The robot can actually drive and responds accurately to our hand commands. After a lot of debugging, we were able to figure out how to use the leap motion data to power the motors through the sparkfun.
What we learned
Desperation Leads to Innovation
What's next for Leap Motion Controller for Robot
Fix gesture command accuracy and improve on durability of the chassis. Other than that, we are super proud and hope you have fun playing with our creation! :-)
Built With
- java
- javascript
- leap-motion
- photon
- sparkfun




Log in or sign up for Devpost to join the conversation.