




Inspiration
We've been aeromodellers for the past 3-4 years, building and flying our R.C planes. This time we decided we wanted to create a new way to control the planes, which didn't involve fiddling with joysticks. So we decided to combine our experiments with leap with our aeromodelling, arriving at an unique and amazing way to control the syma s102 helicopter.
What it does
The hack allows us to control the helicopter on it's three axis, by simple hand motions. As seen better in the video, the helicopter mimics our hand movements, an upward movement in our hand position relative to the leap brings about increased throttle and thus altitude for the helicopter. The same goes for the pitch and yaw functions - essentially our hand is now the natural control for the helicopter - the end of joysticks that need to be carefully managed.
How we built it
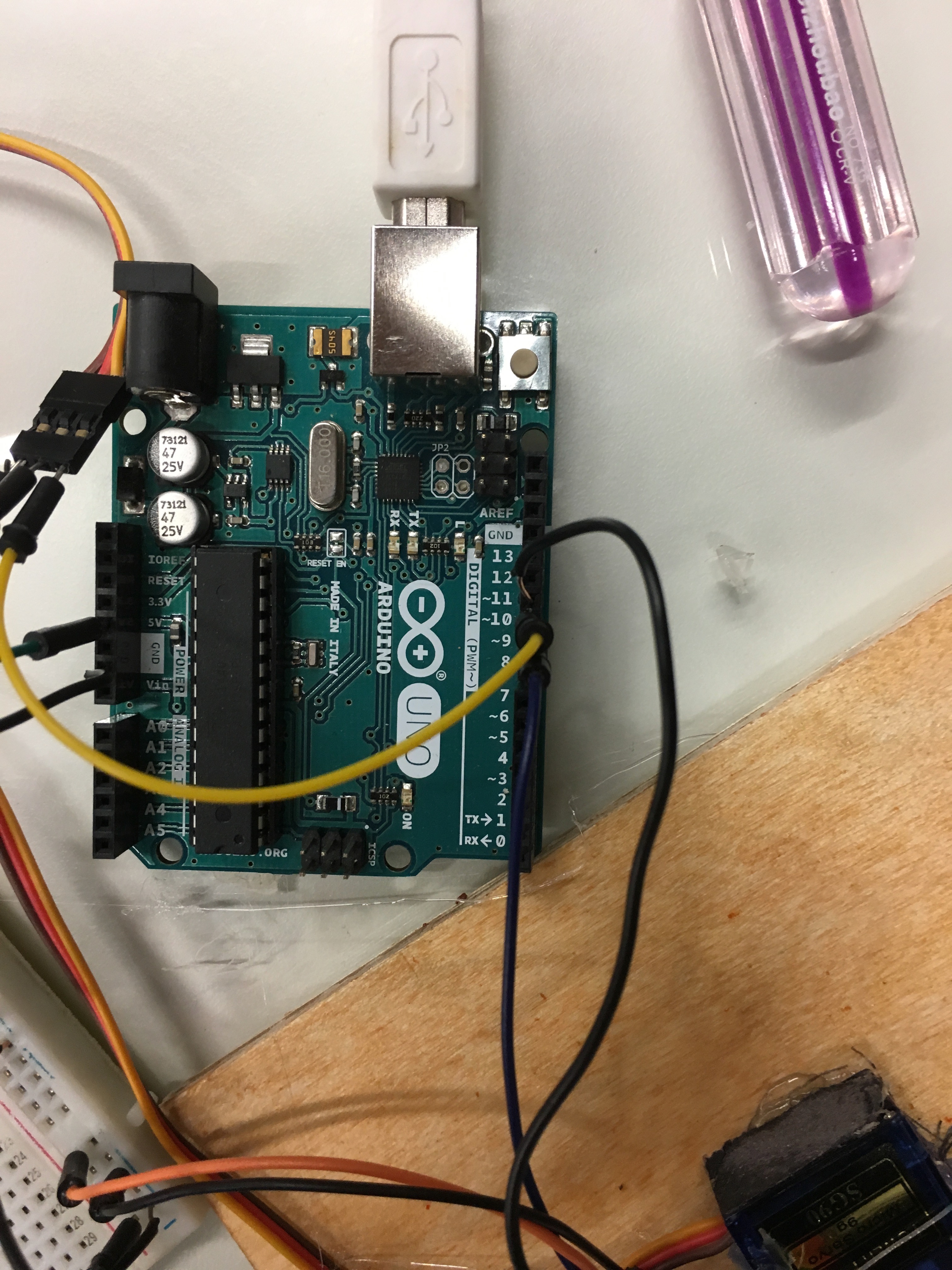
We used Johnny five framework to control the Arduino in javascript. Javascript was used because it allows us to easily retrieve the leap motion frame data and use it to map out the values of pitch, throttle and yaw. The Leap motion essentially controls the Arduino's servos, which control the joystick appropriately, mapped out to perfectly avoid staggers and provide smooth control.
Challenges we ran into
We initially planned to use IR LED's to control the plane directly, but we had no access to an oscilloscope to find out the frequencies of the IR LED's and thus find out the packets that we needed to program the throttle and yaw/pitch. But we found a way around it using servos.
We also planned on making a unity simulation of the helicopter flight using leap, however the technical challenges of it were too large, we made good progress, succeeding in combining the leap motion with unity to project our hands on the screen - but building a helicopter simulation was too intensive, especially since two of us were focused on hardware, only two of us on software.
Accomplishments that we're proud of
Controlling a helicopter with our hands! Being only in JC 1 and 2, and having a total of 1 year in coding experience between the 4 of us, we wanted to hack something that was cool and unique while providing a challenge for us to build and test.
What we learned
Software development requires a lot more practice and prior experience, for example when we tried using unity and C# to code a simulation we ran into a lot of basic errors an experienced programmer could have solved. We did learn however that perseverance does pay off eventually, we believe that given another day or two, we could have succeeded in making the simulation, as we had made progress towards the end of the hackathon. We also did learn about the different and multiple uses of javascript in robotics programming, something all of us ar interested in.
What's next for Leap Motion Controlled Helicopter - with Arduino
Our creation is not just controlling a helicopter - quadcopters can fly autonomously. We are bringing the natural movement of hand motion to a mechanical action using an arduino - and that too without the control boards that are there in smart vehicles. We managed to control a simple syma s102 helicopter, containing hardly any technology in it, with a leap motion, integrating this natural and intuitive function with any piece of technology.
Built With
- arduino
- javascript
- johnny-five
- leap-motion
- lots-of-wires
- node.js
- servos
- syma-s102-helicopter











Log in or sign up for Devpost to join the conversation.