-
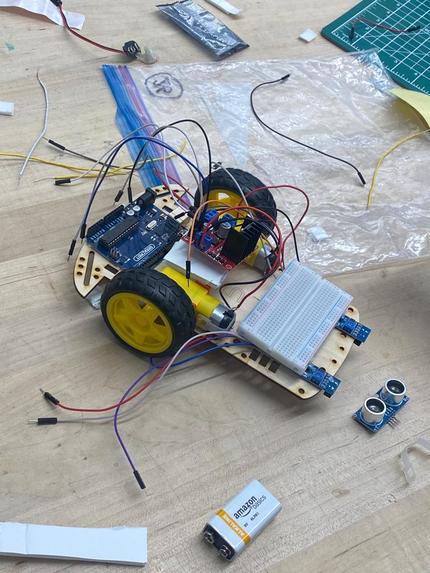
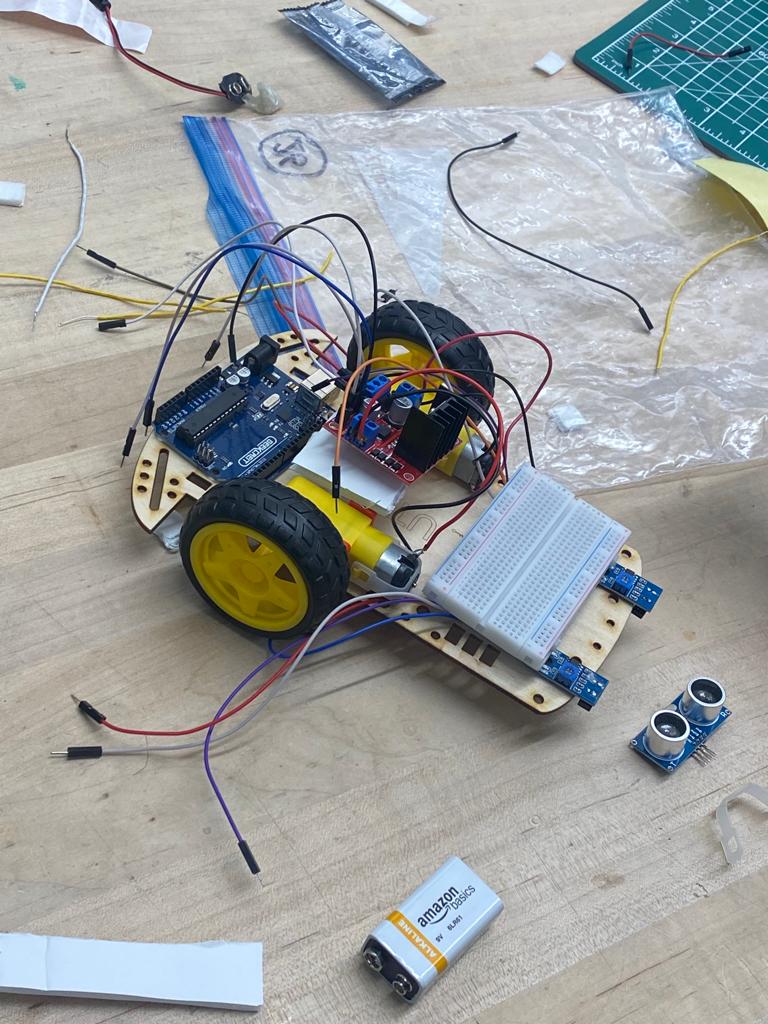
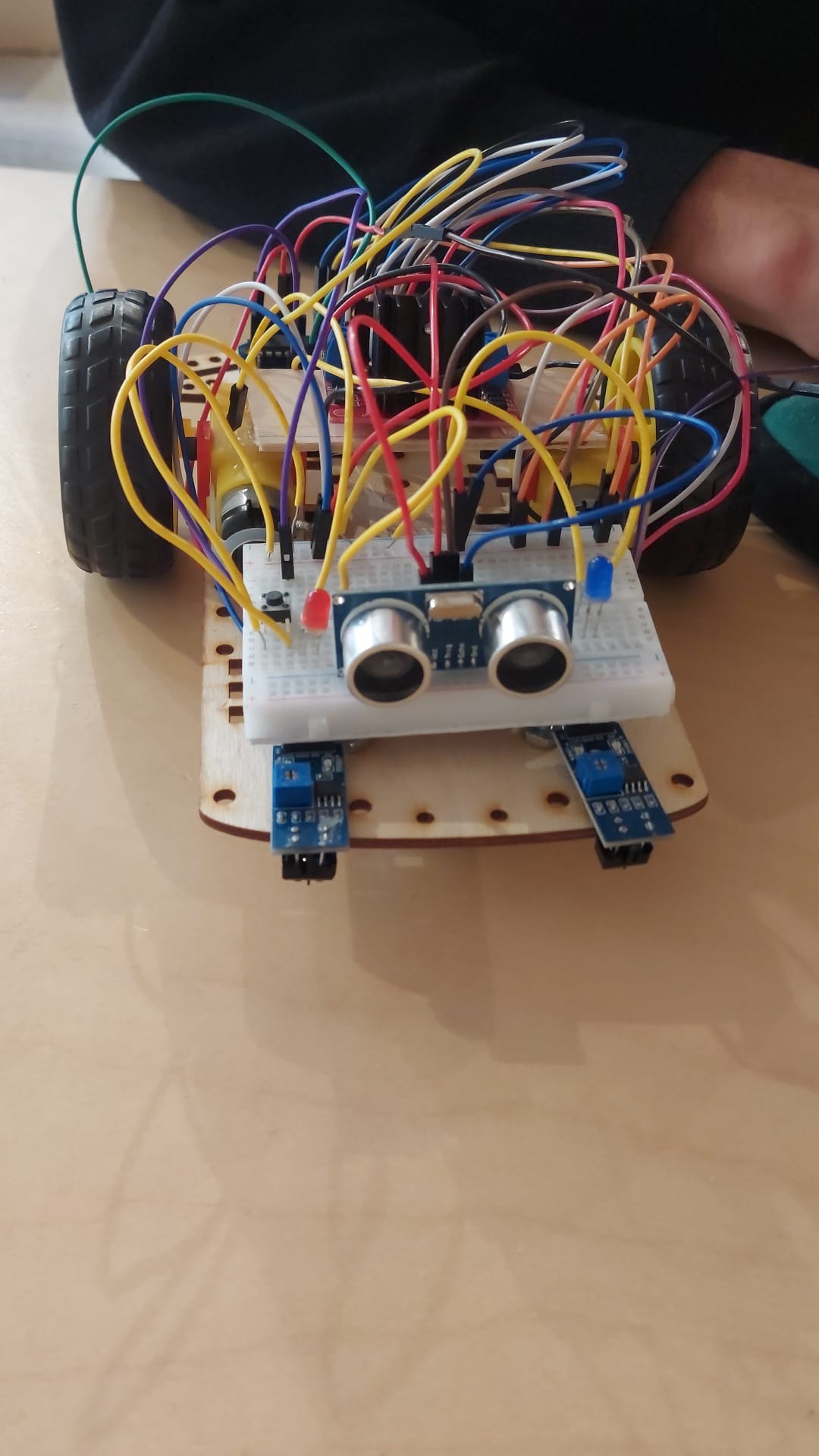
Hardware assembly IPR
-
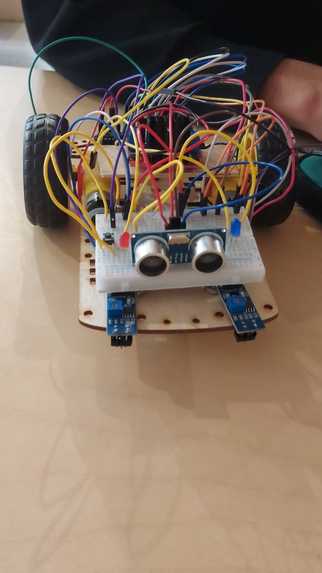
Completed Hardware assembly
-
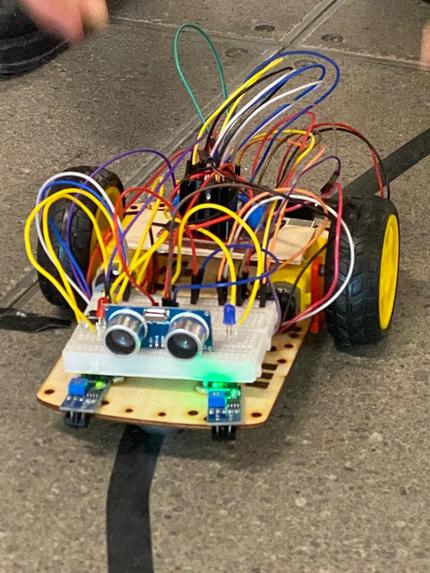
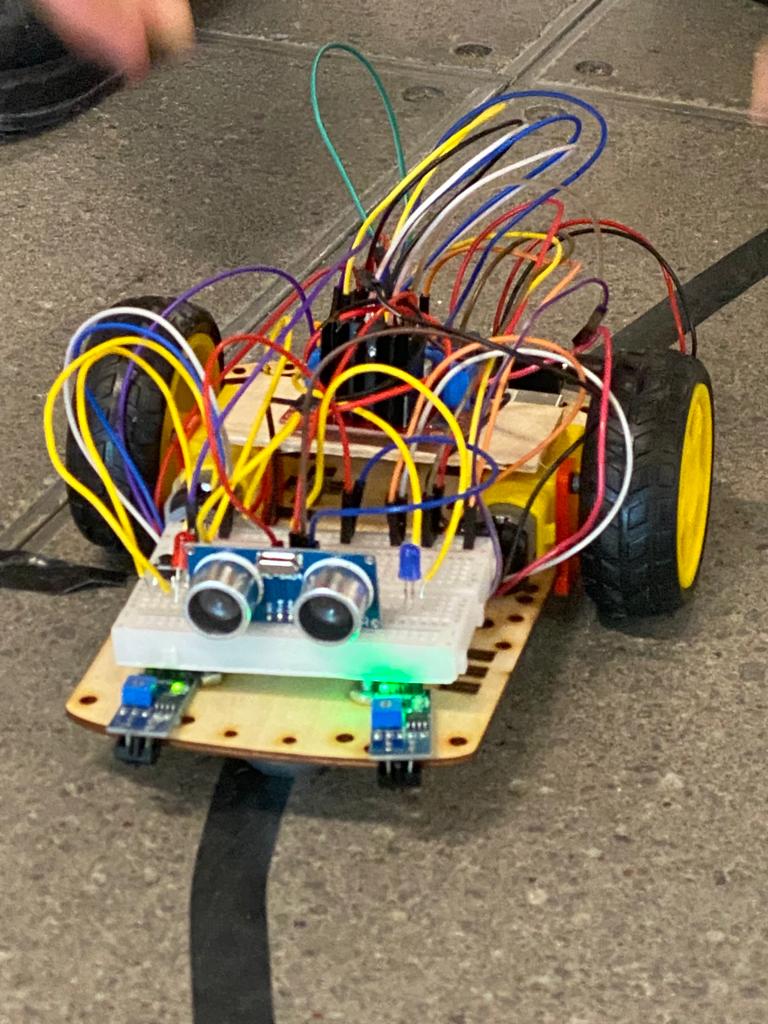
Line-following testing in the Atrium on the 5th floor
Inspiration
Explore, gain hands-on exposure, and experientially learn about building an AV.
What it does
--> Uses IR sensors to detect relative colour differences. Based on IR sensor input, makes instantaneous decisions on trajectory based on the code we wrote and uploaded to the onboard Geekcreit. --> Uses Ultrasonic sensors to detect obstacles and stops the vehicle when in close proximity to an object.
How we built it
Challenges we ran into
--> Optimizing the hardware layout of the vehicle. --> The lower power of batteries compared to the USB from the computer prompted us to change the default motor speed for the entire code. --> Initially, an incorrect circuit layout prevented us from uploading our code to the onboard Geekcreit. It took us a while to realize that the root cause of this issue was an incorrect circuit construction. Reconstructing the circuit proved to be more time-consuming than expected. -->At first, we could not make the vehicle follow sharp turns on the line-track.
Accomplishments that we're proud of
--> Overcoming all the challenges listed above.
What we learned
It might be more effective to have the driver wheels at the front of the vehicle as that would make sharper turns more feasible.
What's next for Last Minute AV
--> Reflect on our learnings this weekend and improve upon them in the future.
Built With
- arduinoide
- breadboard
- c
- drivercontrol
- geekcreit
- irsensors
- motors
- ultrasoundsensors

Log in or sign up for Devpost to join the conversation.