-
-
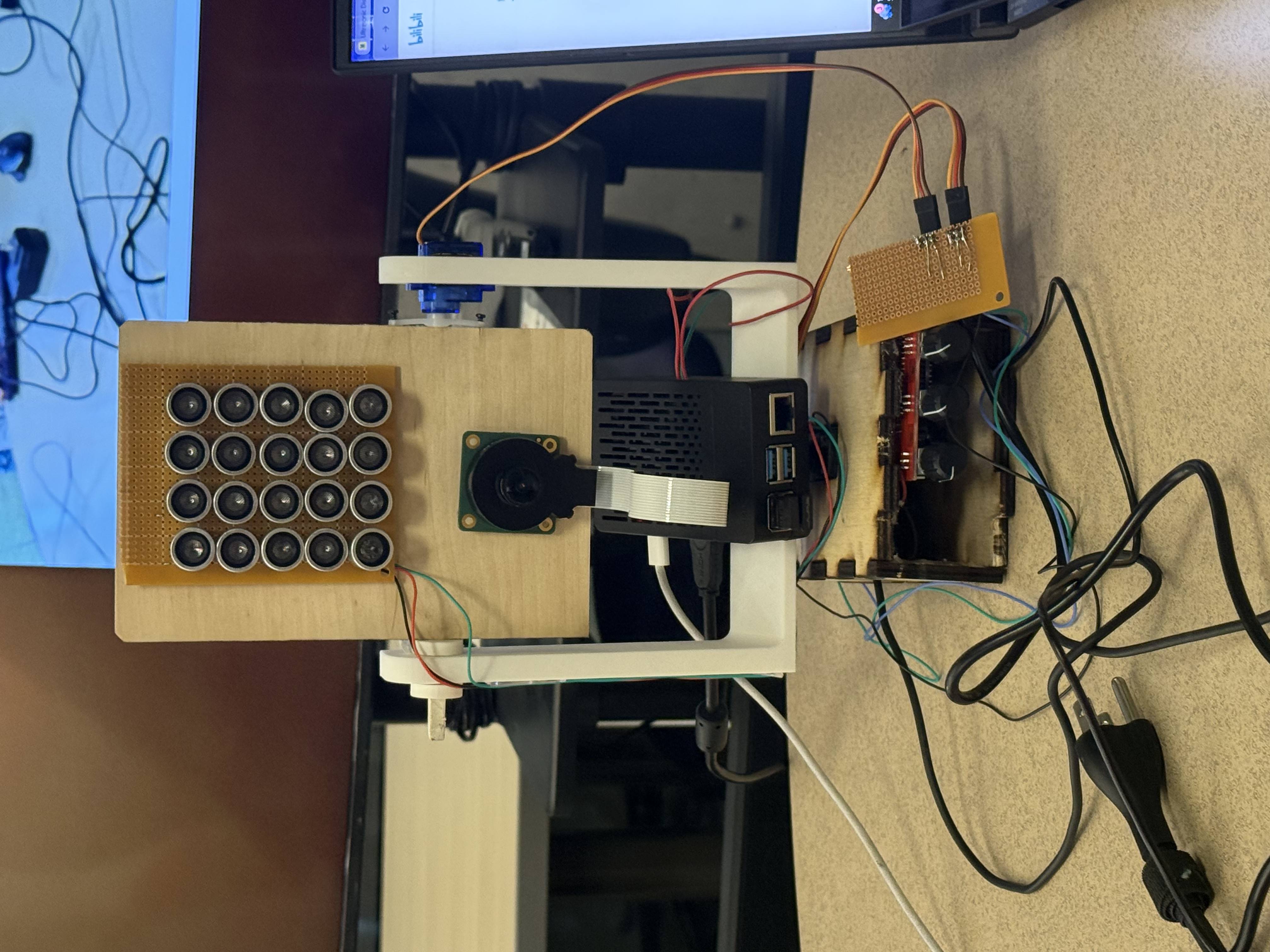
The Apparatus
-
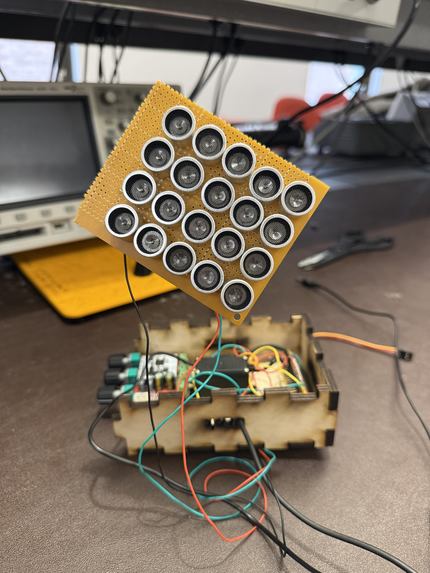
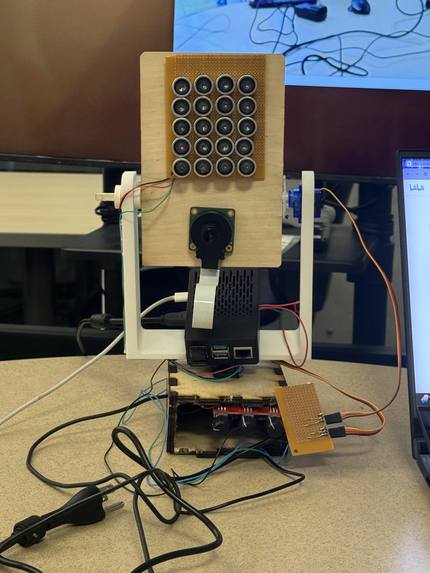
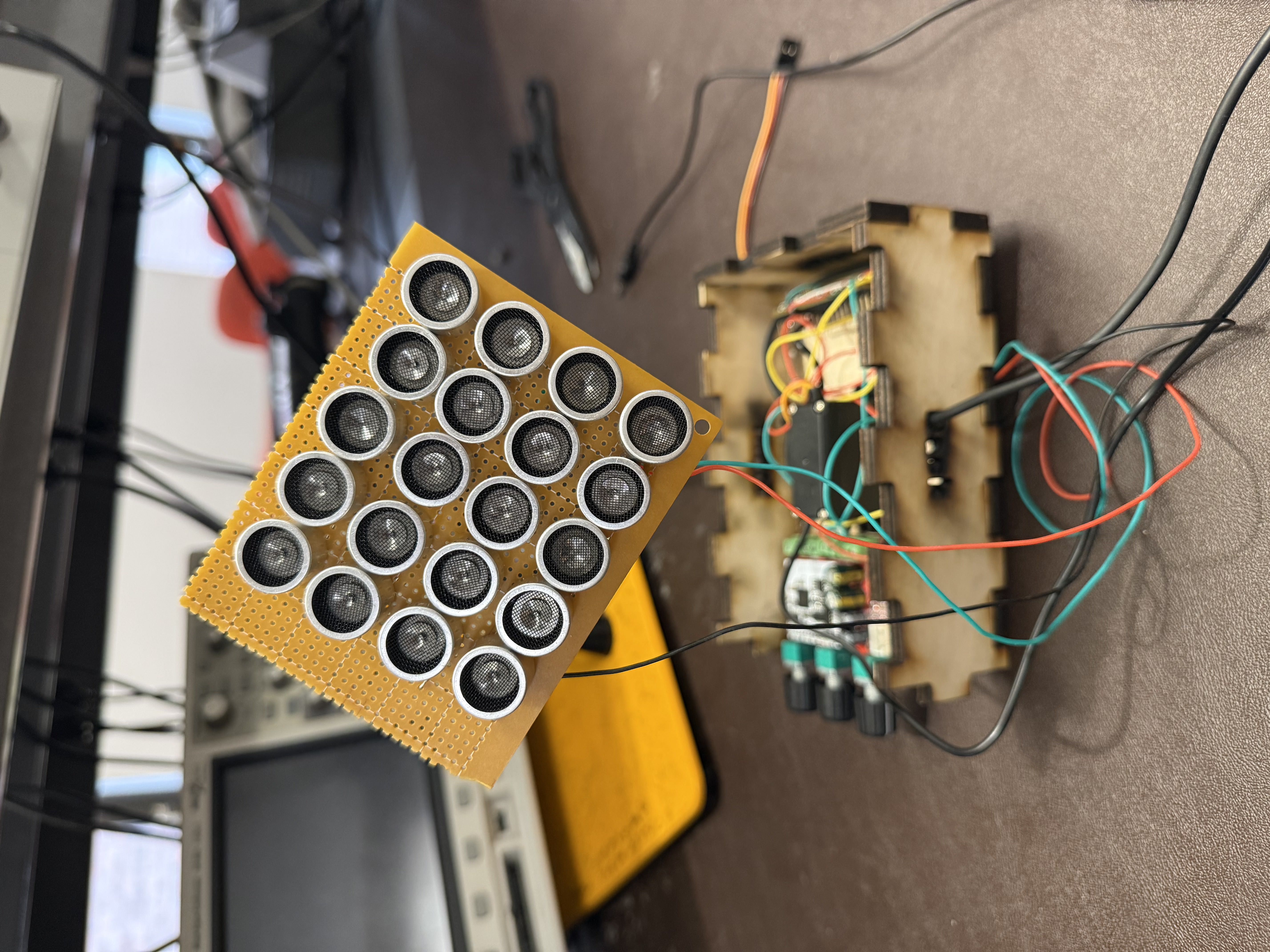
Speaker Array and the Enclosure
-
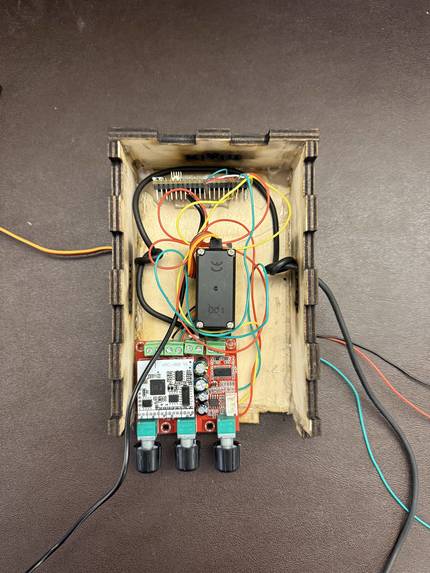
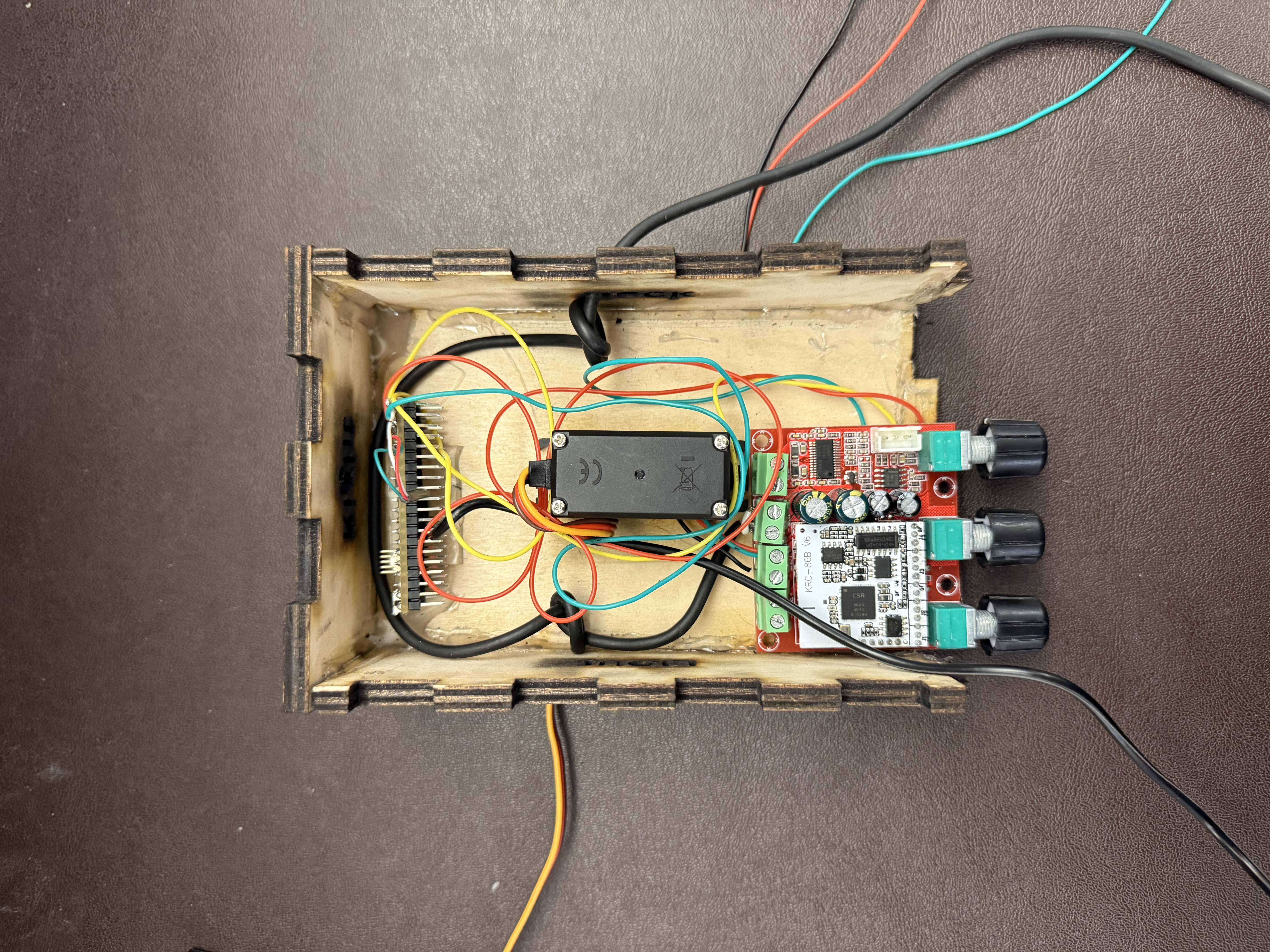
Top View of the Electronics in the Enclosure (Top Right: Power Amp Middle: Servo Motor Lower: DSP Chip)
-
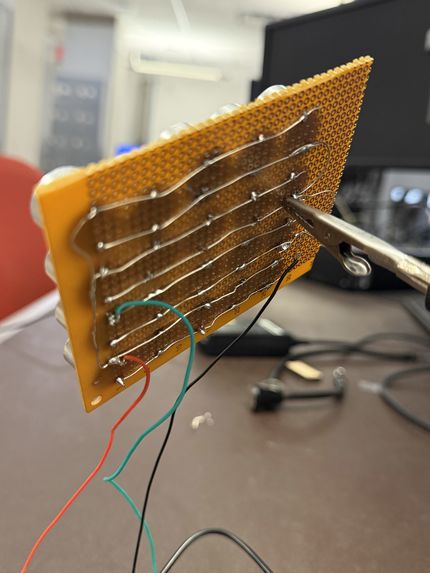
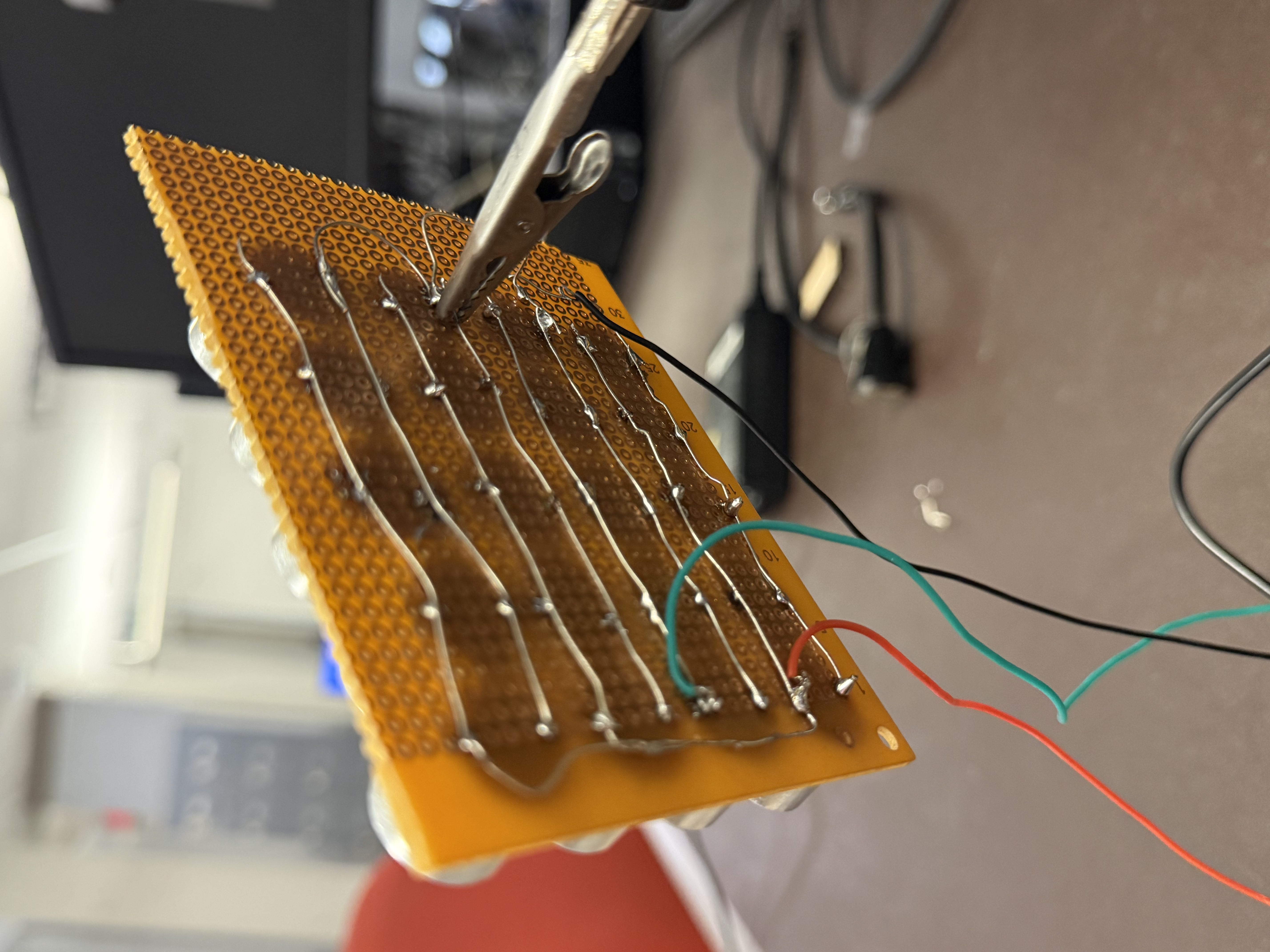
Prototyping Board Soldering For The Speakers
-
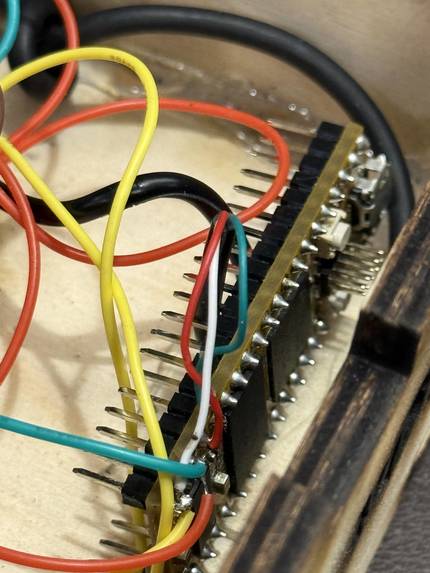
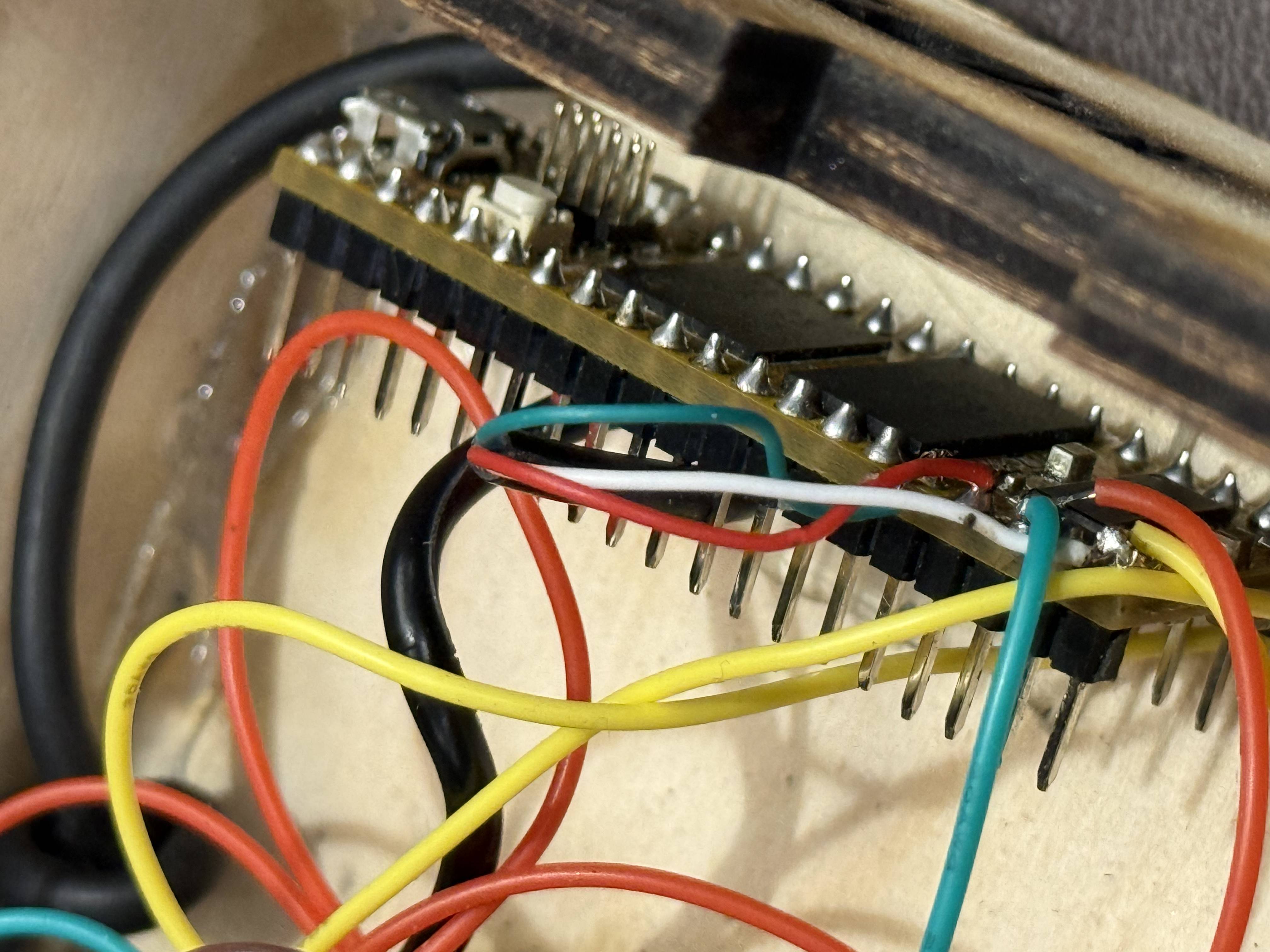
Details of the Daisy Seed DSP Chip
Inspiration
The process of nonlinear acoustic interactions enables ultrasonic beams to transform their intense energy into audible sound which travels through the air as a focused beam with minimal side effects. This principle allows an array of ultrasonic driver to produce a highly concentrated sound image which enables users to hear their personal speaker audio while the surrounding noises remain at a low level. The system will use computer vision face tracking algorithms on Raspberry Pi with simple actuators to create an automatic system which adjusts its output based on the listener's physical location.
What She Could Do
The prototype contains a 5x4 ultrasonic unit array which produces a focused acoustic beam that advances its energy while maintaining protection for surrounding areas from interference. The array rests on a prototyping gimbal system which enables both azimuth and elevation movements while a U-shaped fixture provides stability to the system. The system uses a Raspberry Pi with a camera module attached to the gimbal to track human faces in real time which enables the system to adjust the speaker position for better acoustic performance.
Imagine it’s early in the weekends morning and you’re getting ready to stretch and do your routine Pilates workout with your virtual coach on the TV, except your family is still asleep. Instead of turning up the volume or fumbling with headphones, you simply power on this directional speaker. The audio becomes crystal clear to you, without leaking into the rest of the house.
As you move, the speaker automatically tracks your position and orients itself so the audio beam stays aligned with you throughout the exercise. You remain the only person who hears the coaching instructions and music, preserving both the clarity of your workout and the peace of your sleeping household.
Creation Process
All ultrasonic driver units were salvaged from standard Arduino ultrasonic proximity sensors, utilizing both the transmitter and receiver elements as active radiators. The oscilloscope measured frequency responses of each unit to determine the individual differences between array elements which resulted in a more balanced spatial pattern. Impedance was measured and matched to the power amplifier output by wiring drivers in series. The system received a custom digital signal processing pipeline which processed audio data and provided additional system flexibility.
For the physical enclosure, we employed standard rapid-prototyping fabrication methods. The chassis and internal mounting board were laser-cut, while the speaker bracket was 3D-printed to provide a precise fit and stable support. A custom low-friction bearing was also 3D-printed and lined with tape to reduce rotational resistance. Two hobby servo motors provide azimuth and elevation actuation, and are controlled by a Raspberry Pi paired with a camera module.
Challenges
The project encountered its most significant logistical challenges in the short 96 hours to work due to the different work/school schedule of members. The DSP implementation needed extensive development as the electronics supply chain encountered limitations because it used recycled amplifier and transducer components. The simultaneous snowstorm created delivery problems which required us to retrieve essential parts from the EECS lab recycling bins.
Link to the DSP Repo: https://github.com/rxg695/hackcwru-2025-clea-dsp
The mechanical design required three main challenges to achieve which involved creating an enclosure that would fit the servo motors while remaining both small and light in weight and developing a bearing system with minimal friction and integrating all electronic components into a unified design that looked organized.
The computer vision system achieved reliable facial recognition during its first hour of operation but the system experienced major delays due to the time it took for the python code to communicate with the servo motor actuators.
What We Are Proud Of
We are proud of the tight collaboration and professionalism demonstrated by our five-person team throughout the project, as well as the way we navigated the challenges under extreme time constraints. Despite the compressed schedule, we successfully produced a fully functional prototype whose facial tracking subsystem interfaced seamlessly with the motor actuation, resulting in an impressive in-person listening experience. We are also proud of the interdisciplinary integration of hardware, signal processing, computer vision, and mechanical design that made the system possible.
What We Have Learned
We learned that even students are capable of making a big impact. We overcame bad weather, schedule differences, and prototyping constraints to create a product that we are all proud of.
What's Next
We want to further explore the capabilities of this technology. Since the system uses an array of transducers, it is possible to implement phase-controlled beamforming to electronically steer the acoustic beam rather than relying on servo motors. The removal of mechanical actuation would result in reduced noise levels and simplified systems which could be designed into smaller spaces.
Built With
- 3dprinting
- dsp
- facedetection
- lasercutter
- opencv
- pid-controller
- python
- raspberry-pi







Log in or sign up for Devpost to join the conversation.