Inspiration
During the competition, we researched in-depth about FTC robots during this year's game "Into the Deep" because of similar packaging constraints and game similarities. Inspired by linkage mechanisms on teams from various teams, we designed a virtual four-bar arm to extend far enough vertically and horizontally to reach 3 core modules on the labs platforms.
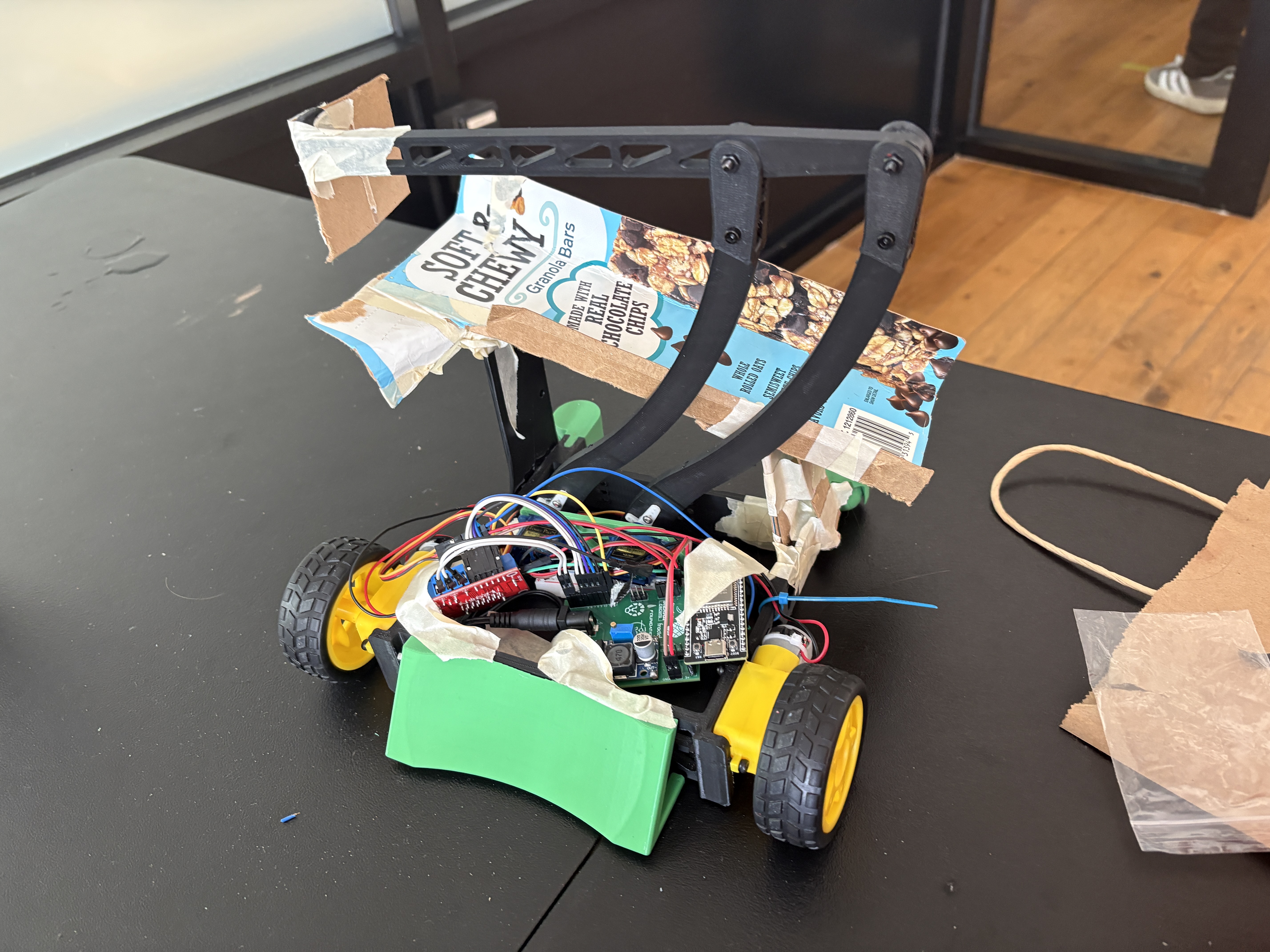
What it does
Our team prioritized the scoring of energy cells and core modules due to their high point value. KittenBot's lightweight custom PLA drivebase makes it lightweight and agile on the field, making it easy to manipulate elements on the ground such as energy cells. It has a four-bar arm mechanism that extends across the lab table and swipes each core module one by one onto a ramp on its drivebase, which then slides it onto the command center.
How we built it
We cadded the robot in Onshape by creating a mastersketch to map out all of the geometry for the four-bar and the ramp, making sure it would fit within frame perimeter, and measuring center of gravity. As we rendered everything in 3D, KittenBot's parts were sent to the Print Farm, manufactured, and built in parallel. During the process of waiting in the extensive 3D print queue, we cut pieces out of cardboard to create prototypes to test the code on the practice field. After printing all the parts overnight, we finished construction the next day and tuned our robot on the field alongside our alliance partners until it was time for competition.
Challenges we ran into
We ran into a lot of challenges at the competition, but we came up with efficient methods to solve them. Firstly, many of our parts contained geometry that mostly constrained us to 3D printing due to their length and complexity. Unfortunately, we weren't the only team that needed things to be printed for their designs. To solve this, we modified the parts in a separate branch on Onshape just in case we needed to laser-cut them instead. Our code issues were also extensive, including slow communication within the server that talked to the robot. We swapped it out for an ESP NOW instead to decrease the delay while driving mechanisms. Both of the servos that drove the arm also burnt out an hour before competition was scheduled to start, so we had to swap them out in the nick of time.
Accomplishments that we're proud of
Most of our team are engineers, so we learned a lot about electronics and coding robotic mechanisms during this competitions. Our archetype worked great on the first try, and continued to be a reliable mechanism as we tested it on the field. We functioned well as a team and were able to do many things in parallel during the 30-hour process due to our expanded range in abilities. So far, our team has surpassed every challenge coming our way. In the next few hours, we're setting our sights on conquering the competition, too.
What we learned
We learned a lot about how important responsive robot communication is towards creating an efficient robot, as well as how to use motor controllers. Our engineers gained experience in making strategy compromises, material cost tradeoffs, and designing around machining and manufacturing time. Overall, our teamwork and communication improved, and by the end of the 30-hour time period we were functioning like a well-oiled machine.
What's next for KittenBot
If we had more time, KittenBot would have additional mechanisms such as a claw to pick up cubes on the floor and on the Depots. Our team plans to bring it home in order to iterate off of it more and eventually display it as a outreach robot.

Log in or sign up for Devpost to join the conversation.