-
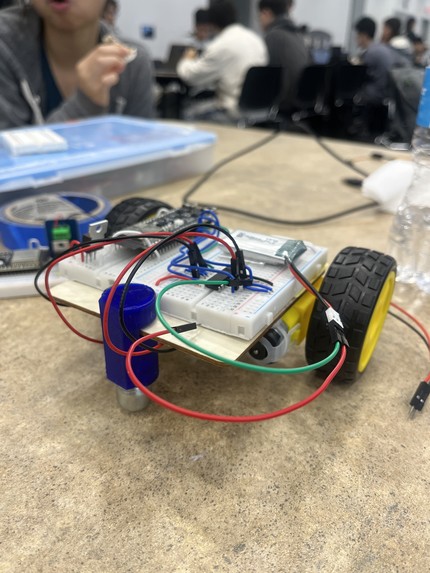
Our Project!
-
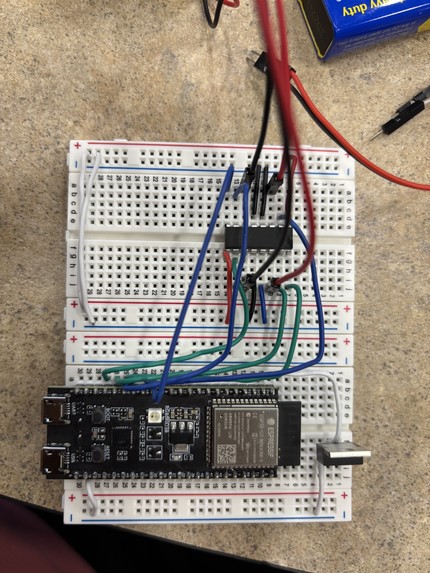
beautiful circuit
-
Sleepy Time
-
#selfie
-

#selfiept2
-

Us at the parking garage after 12am
-

many many esp32s fried
-

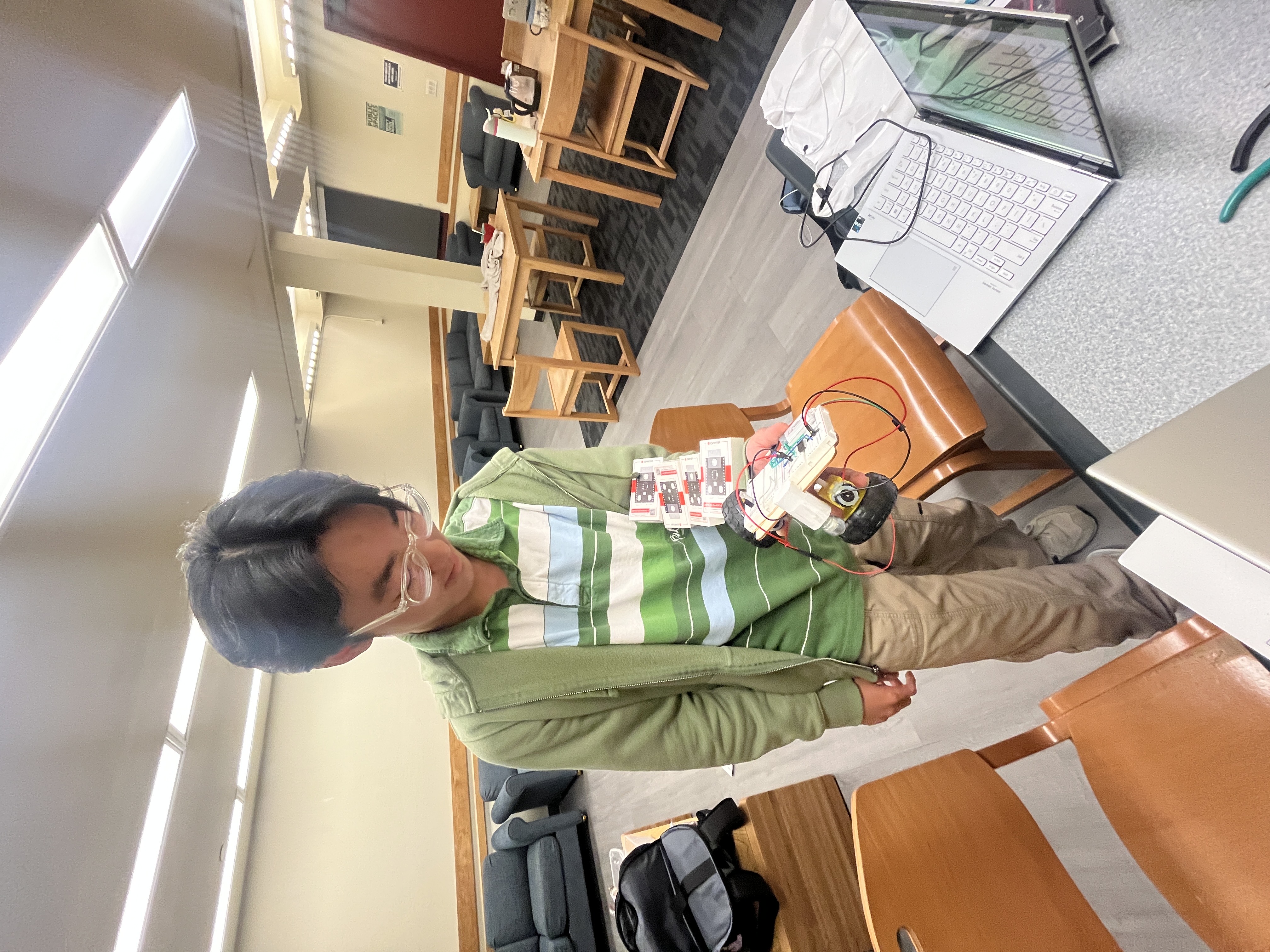
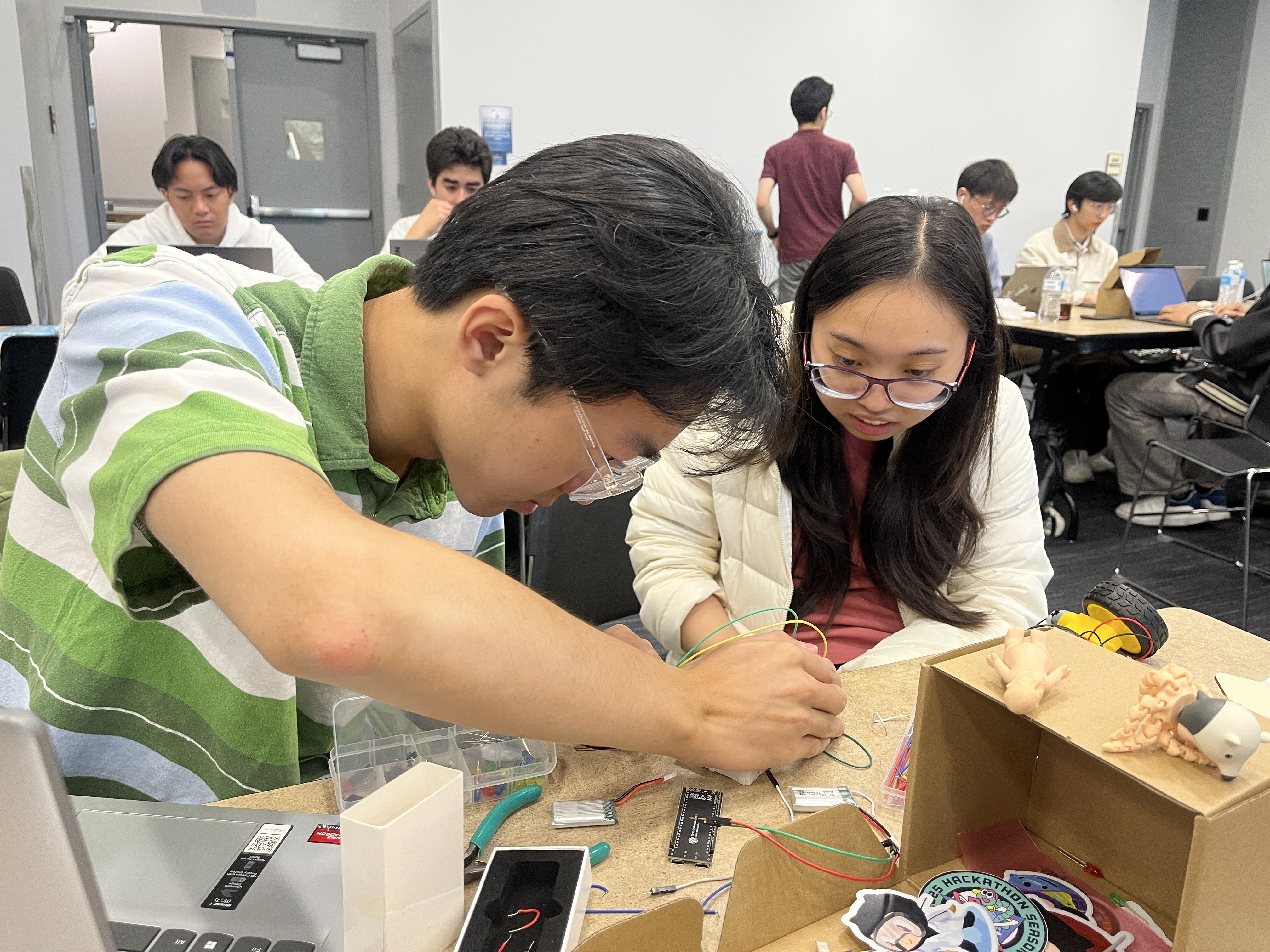
circuit time
-
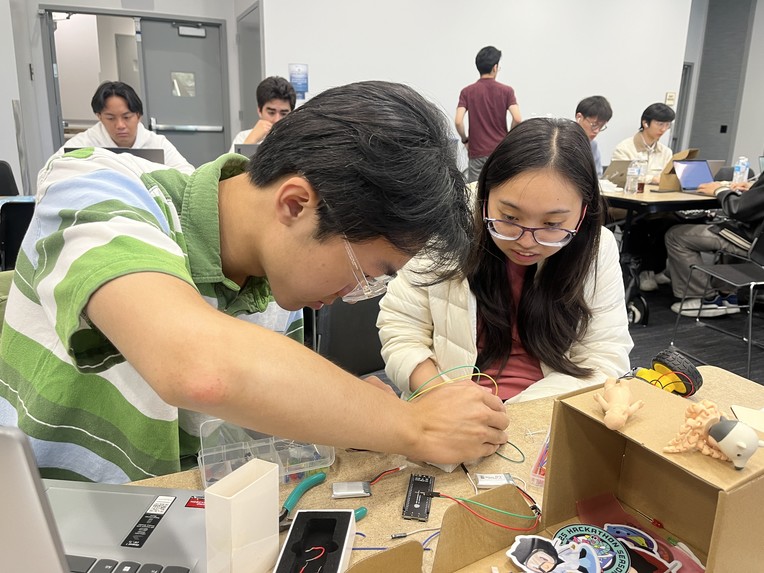
#teamwork
-
2am vibes



Inspiration
Heart disease is responsible for 1 in 5 deaths in the U.S., claiming around 700,000 lives each year. As students, we’ve experienced firsthand how hard it can be to stay motivated to exercise. To make movement more exciting, we created Kartiac Arrest, a racing game where your physical activity controls a rover in real-time. By turning exercise into an interactive and competitive experience, we aim to help people engage with fitness in a fun, meaningful way.
What it does
Our system combines accelerometers with vibration sensors to measure how intensely a player moves. This motion data is transmitted via Bluetooth to a robotic rover, where it’s converted into motor speed. The result: the more you move, the faster your rover drives toward the finish line, transforming physical effort into real-time gameplay.
How we built it
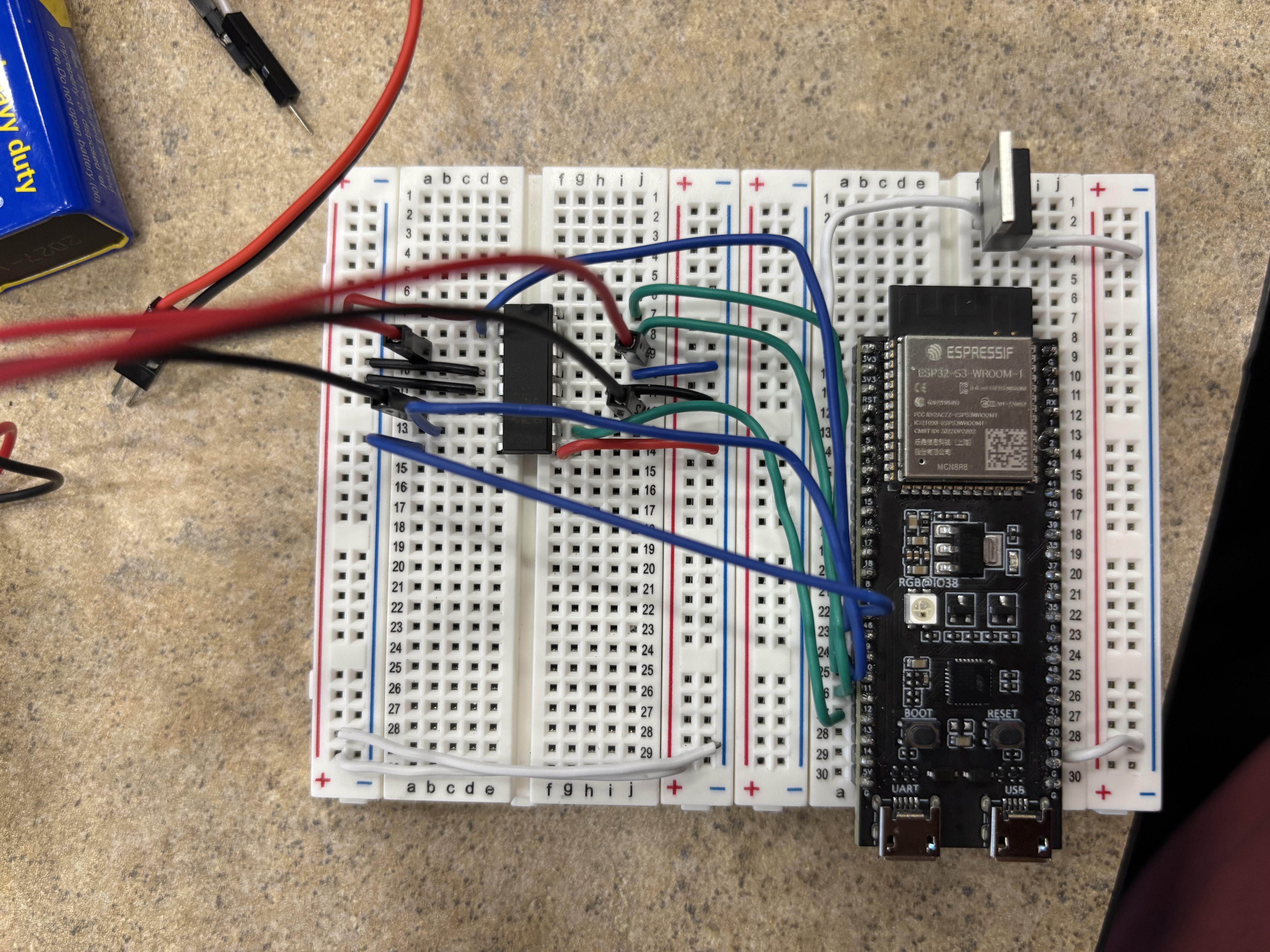
Sensor Breakdown For the accelerometer setup, we connected an accelerometer module to an ESP32 microcontroller. A power regulator stepped down the 9V battery to 3.3V to safely power the ESP32. The ESP32 collected real-time motion data and sent it via Bluetooth to a second ESP32 onboard the rover, which translated the data into motor speed. In the vibration sensor setup, we used the Gikfun Analog Ceramic Piezo Vibration Sensor Module to detect motion intensity. When movement is sensed, the sensor produces an analog signal, which is read by an ESP32. Similar to the accelerometer system, a power regulator was used to convert 9V to 3.3V, and Bluetooth was used to send the data to the rover for motor control.
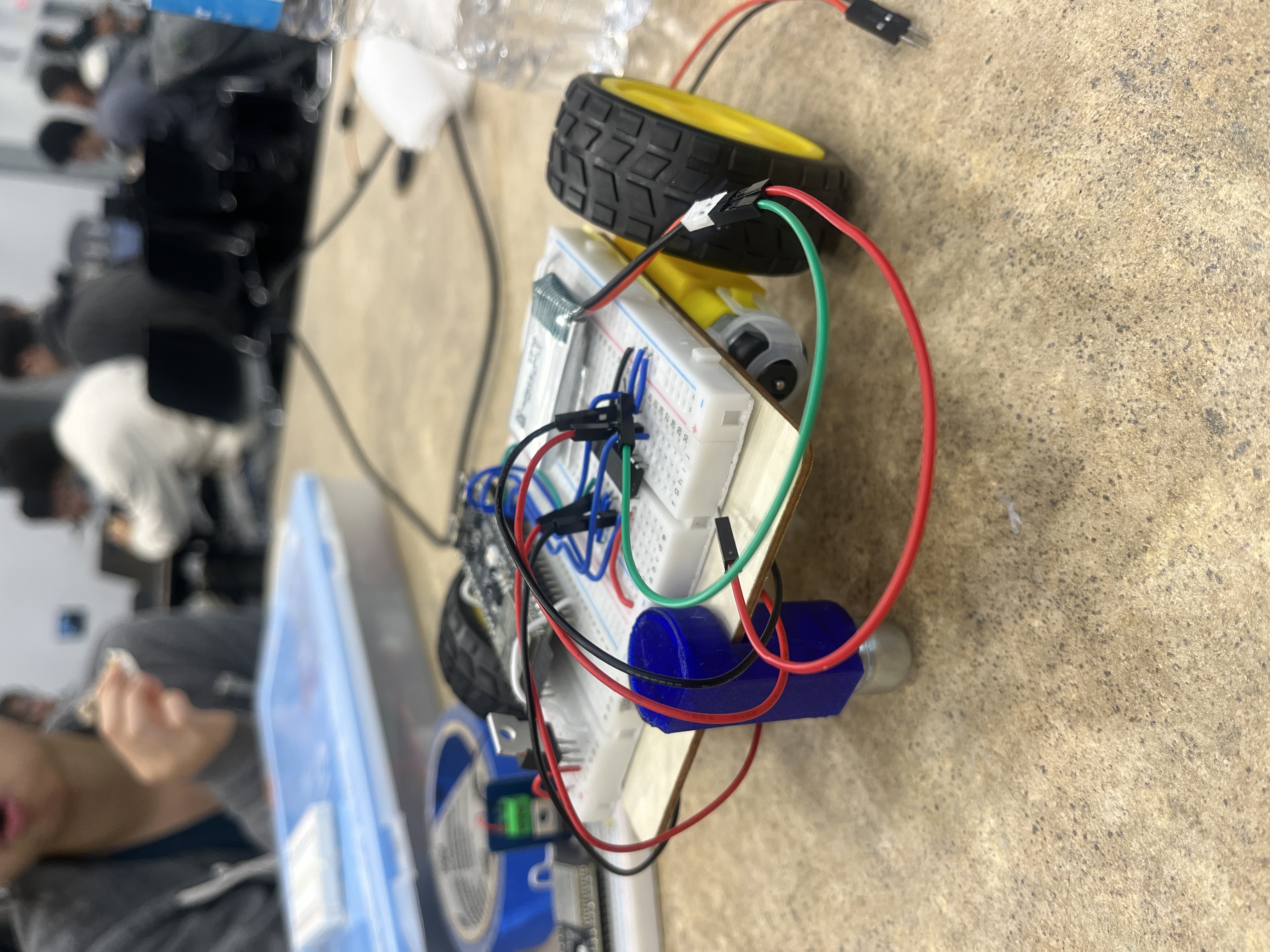
Rover Breakdown Our rover is built with a wooden chassis that serves as the foundation and securely holds all components in place. It uses two DC motors for movement, allowing it to drive forward. A wheel caster at the front provides stability to the rover. Power is supplied to the ESP32 through a 9V battery, while a LiPo battery powers the motors for more consistent performance. To regulate voltage, we use a power regulator that steps down 9V to 3.3V, ensuring safe operation for components like the ESP32 microcontroller. The ESP32 stores and executes the code needed to receive motion data and control the rover. An H-Bridge motor driver interfaces between the motors and the ESP32, distributing power evenly and enabling directional control. Two breadboards are used to organize and connect all electrical components securely.
Challenges we ran into
Throughout the project, our team faced numerous technical and logistical challenges that required us to pivot our plans frequently. Initially, we planned to use pulse sensors to monitor user activity. However, due to a lack of resources, we had to abandon that approach. We then attempted to work with accelerometers, only to find out they were also unavailable. We even looked into using load cells, but those, too, were not accessible. Faced with a lack of options, we sought guidance from a mentor, who recommended building a mobile application to take advantage of the phone’s accelerometer features. However, this was an ambitious ask given our limited experience in app development. Despite this, one of our teammates tried to host a website on Replit to access the phone's accelerometer data. However, this proved to be unsuccessful, as we struggled significantly because the web hosting did not support our desired protocol. After spending hours pursuing this method, we were discouraged by the outcome and even considered ditching the whole idea.
Fortunately, we received vibration sensors from a friend, which allowed us to revive our initial concept and detect user motion via Bluetooth. Later, we received functional accelerometers, which reignited our motivation and allowed us to move forward with completing the project.
Yet, we continued to face even more challenges along the way, including frying an ESP32 board just before our project was due. Although we encountered many setbacks, our team adapted quickly and continued to problem-solve under pressure.
This project pushed us to adapt quickly, think creatively, and work effectively as a team under pressure. While we didn’t fully achieve our original goal, we gained valuable experience in embedded systems, sensor integration, and real-time communication. More importantly, we strengthened our ability to work as a team, problem-solve in high-stress situations, and keep moving forward despite setbacks.
Accomplishments that we're proud of
Implemented Bluetooth data transmission from a wearable device to a moving rover, converting physical movement into motor control.
Overcame major hardware setbacks, including lack of access to pulse sensors, accelerometers, and load cells, by pivoting and finding alternative solutions.
Engineered a custom power system using voltage regulators to safely power multiple components from different sources (9V battery and LiPo).
Gained hands-on experience with embedded systems, soldering, power management, and sensor integration.
Strengthened team collaboration and problem-solving, particularly under time constraints and technical setbacks during the hackathon.
Adapted quickly to unexpected changes, like shifting from a mobile app approach to web-based solutions, and finally to direct sensor integration.
What we learned
Sensor integration Learned how to work with different types of sensors, interpret their data, and use that data to cause real-time responses
Embedded systems Gained hands-on experience with the ESP32, including Bluetooth communication, voltage regulation, and power management
Debugging under pressure Learned how to troubleshoot hardware and software issues
Team coordination Improved our collaboration skills, dividing tasks based on strengths
Hardware wiring and soldering Became more comfortable with physical prototyping, building circuits, and soldering
Adaptability Learned to pivot when resources or plans fell through and how to stay motivated even when initial ideas failed.
Rapid Prototyping Learned how to quickly build a working prototype within a limited time, from concept to execution
What's next for Kartiac Arrest
Looking ahead, we plan to enhance Kartiac Arrest by expanding beyond gameplay. One major addition will be a calorie calculator that estimates energy expenditure based on the user’s activity, giving players feedback on how to reach their fitness goals. We also aim to integrate health monitoring features, such as real-time heart rate tracking using pulse sensors, to assess physical exertion and personalize difficulty levels.
Another key focus is the effectiveness of the exercise itself. By tracking data over time such as heart rate trends, movement consistency, and calories burned, we can give users insights into their overall health and progress. These features would turn Kartiac Arrest into a tool for building healthier habits in a fun, data-driven way. In the long term, we hope to offer mobile support and multiplayer options so users can compete and stay motivated wherever they are.


Log in or sign up for Devpost to join the conversation.