Inspiration
We wanted to combine robotics and smart mobility to create a robotic car that demonstrates autonomous movement and obstacle detection.
What it does
Kadicar is a robotic car that can move autonomously, detect obstacles, and respond to its surroundings in real time.
How we built it
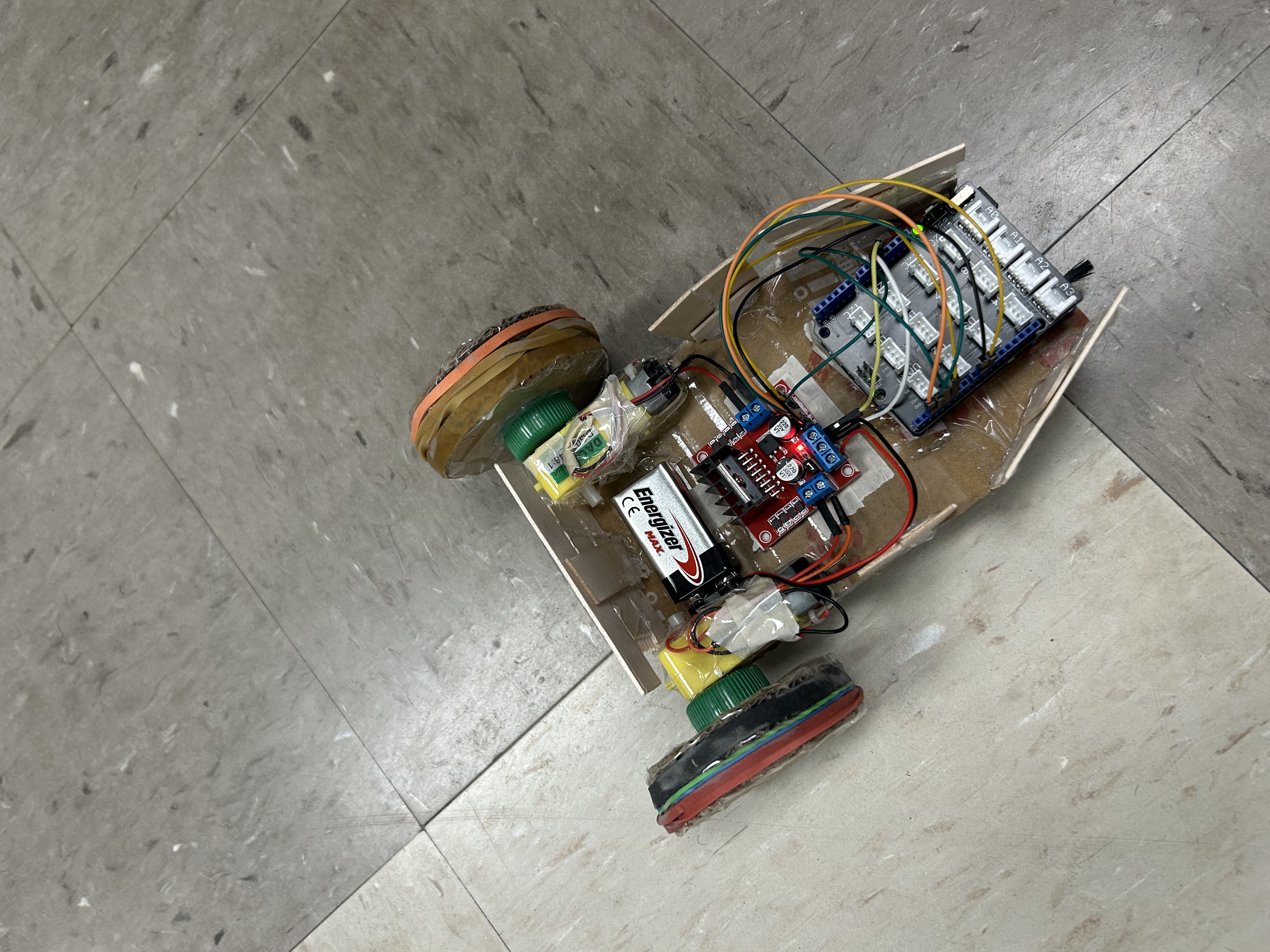
We used motors, sensors, a motor driver, and a microcontroller to build the hardware, while programming the software to control movement and obstacle avoidance.
Challenges we ran into
We faced issues with sensor accuracy, wiring, motor calibration, power management, and debugging the movement logic.
Accomplishments that we're proud of
We successfully built a working robotic car from scratch and improved our engineering, coding, and teamwork skills.
What we learned
We learned how hardware and software work together in robotics, along with troubleshooting, sensor calibration, and autonomous navigation concepts.
What's next for Kadicar
We plan to add AI features, GPS navigation, mobile app control, camera navigation, and voice commands to make Kadicar smarter and more advanced.

Log in or sign up for Devpost to join the conversation.