-
-
Autodesk Inventor Screenshot of the "waste object" I 3D Printed
-

K9 Explorer Banner
-

K9 Robot Showcase
-
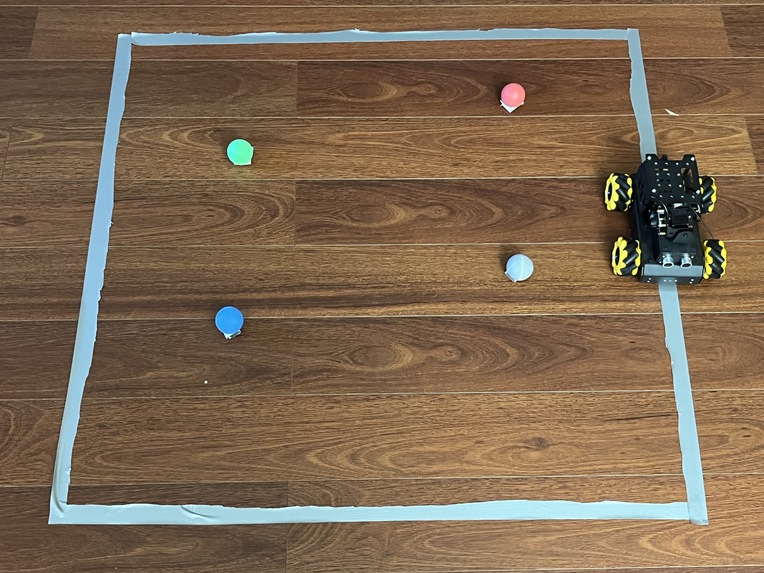
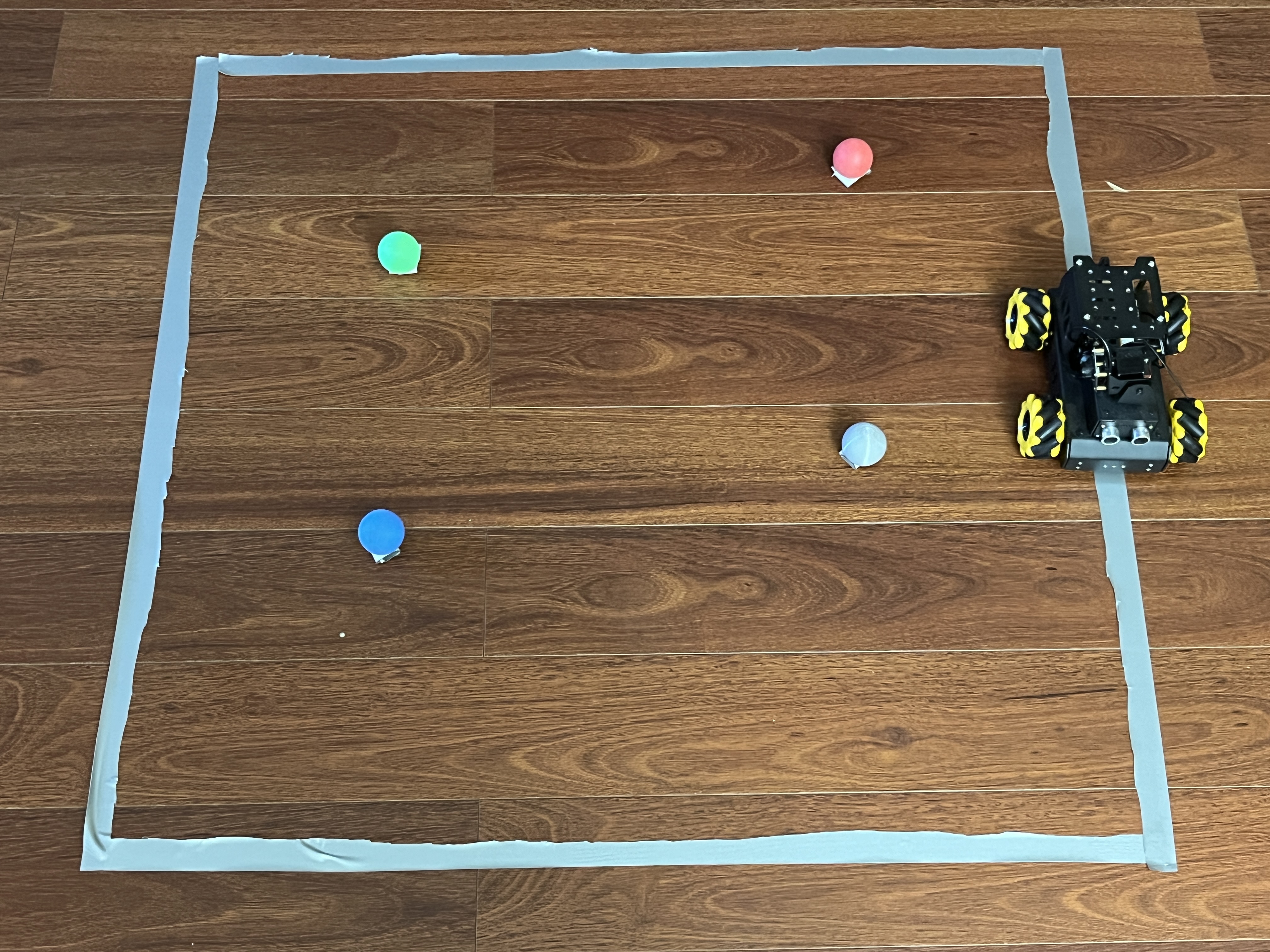
Project Demo 1
-
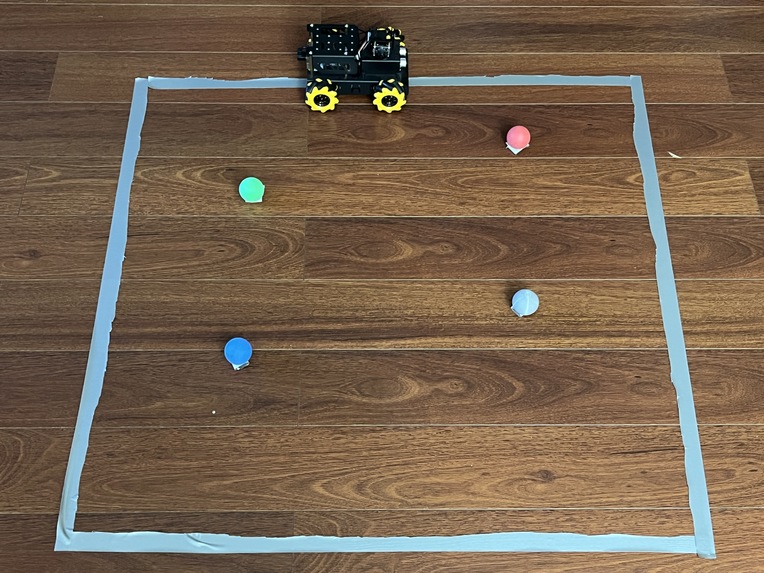
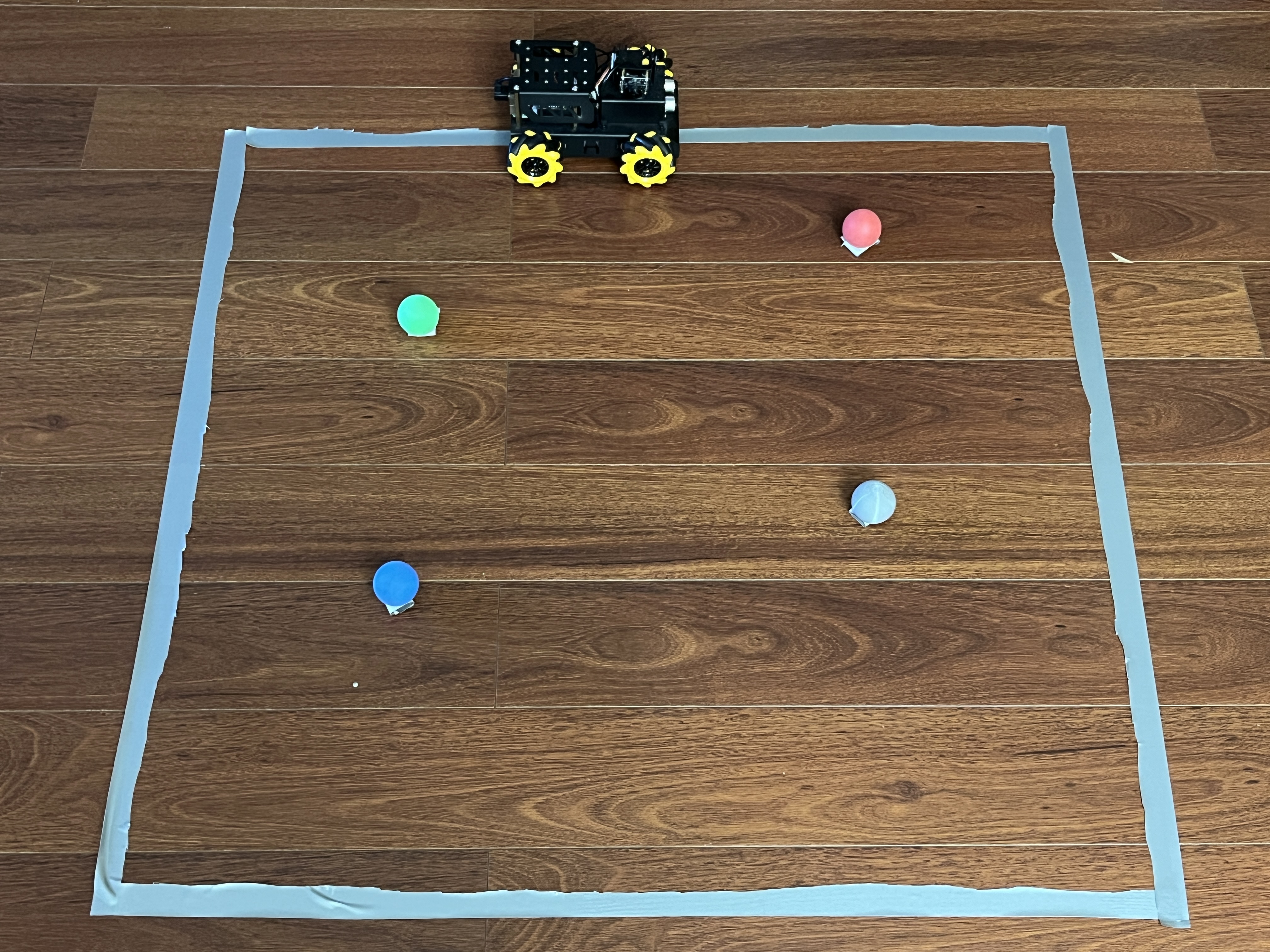
Project Demo 2
-
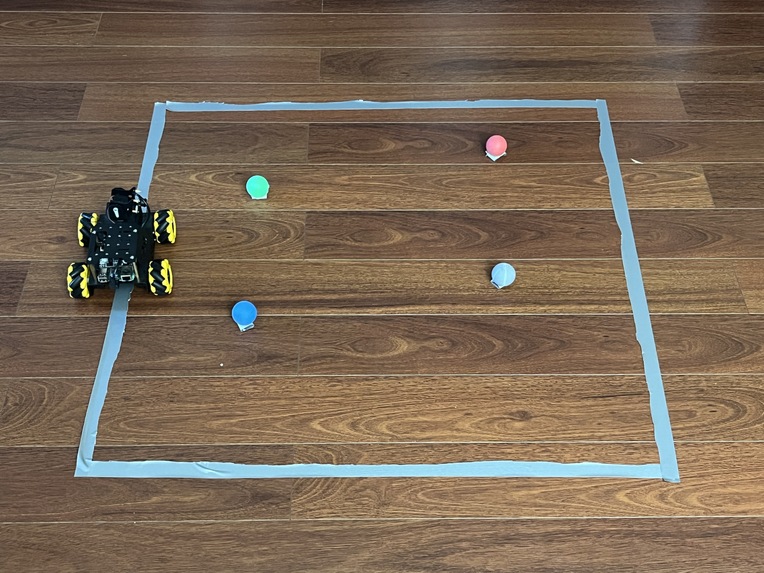
Project Demo 3




K9 Explorer - Beach Cleanup Robot
Brainstorming
- Robot Name: K9 Vision
- Idea: Beach Cleanup Robot
- Objective: Use AI and robotics to identify and collect trash in beach areas.
Goals
Purpose:
- Combat plastic pollution on beaches.
- Educate the public about ocean conservation.
Functionalities:
- Monitor designated areas for trash.
- Identify and locate trash items using AI (Computer Vision).
- Navigate to trash and signal collection readiness.
- Classify trash items using a trained model.
Impact:
- Enhance beach cleanliness.
- Raise awareness about plastic pollution.
- Demonstrate the potential of AI and robotics in environmental conservation.
Final Plan
Prototype Development
Hardware:
- Raspberry Pi-powered robot car.
- 4 mecanum wheels.
- Distance sensor, line follower sensor, and camera.
- LED lights for status indication.
Software:
- OpenCV for vision processing.
- TensorFlow for object classification.
- Python for Robot Control
Functional Description
Monitoring Mode:
- Robot circles the designated area using the line follower sensor.
- Green LED breathing effect to indicate standby mode.
Trash Detection:
- User initiates trash detection via the dashboard.
- Robot stops circling, scans for grey 3D-printed trash items.
- Once trash is located, the robot navigates to it and flashes red LEDs.
Trash Classification:
- Uses a trained AI model to classify the trash.
Implementation Plan
3D Printing:
- Print grey objects to simulate trash.
- Use existing colored balls for initial setup.
AI Integration:
- Train a model to classify different types of trash.
- Implement object detection and classification using TensorFlow and OpenCV.
Testing:
- Test the robot's navigation and trash detection in a controlled environment.
- Fine-tune the AI model for accuracy.


Log in or sign up for Devpost to join the conversation.