-
-
Final Robot Design
Inspiration
Concrete leveling robots and Zen sand garden displays.
What it does
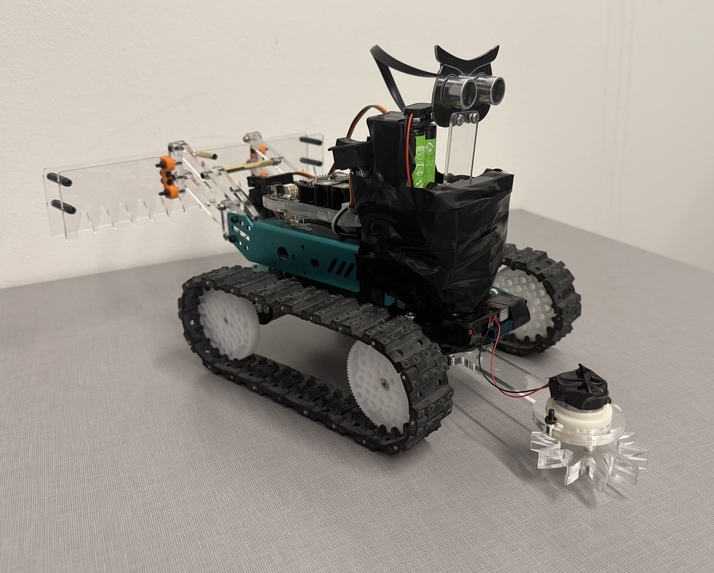
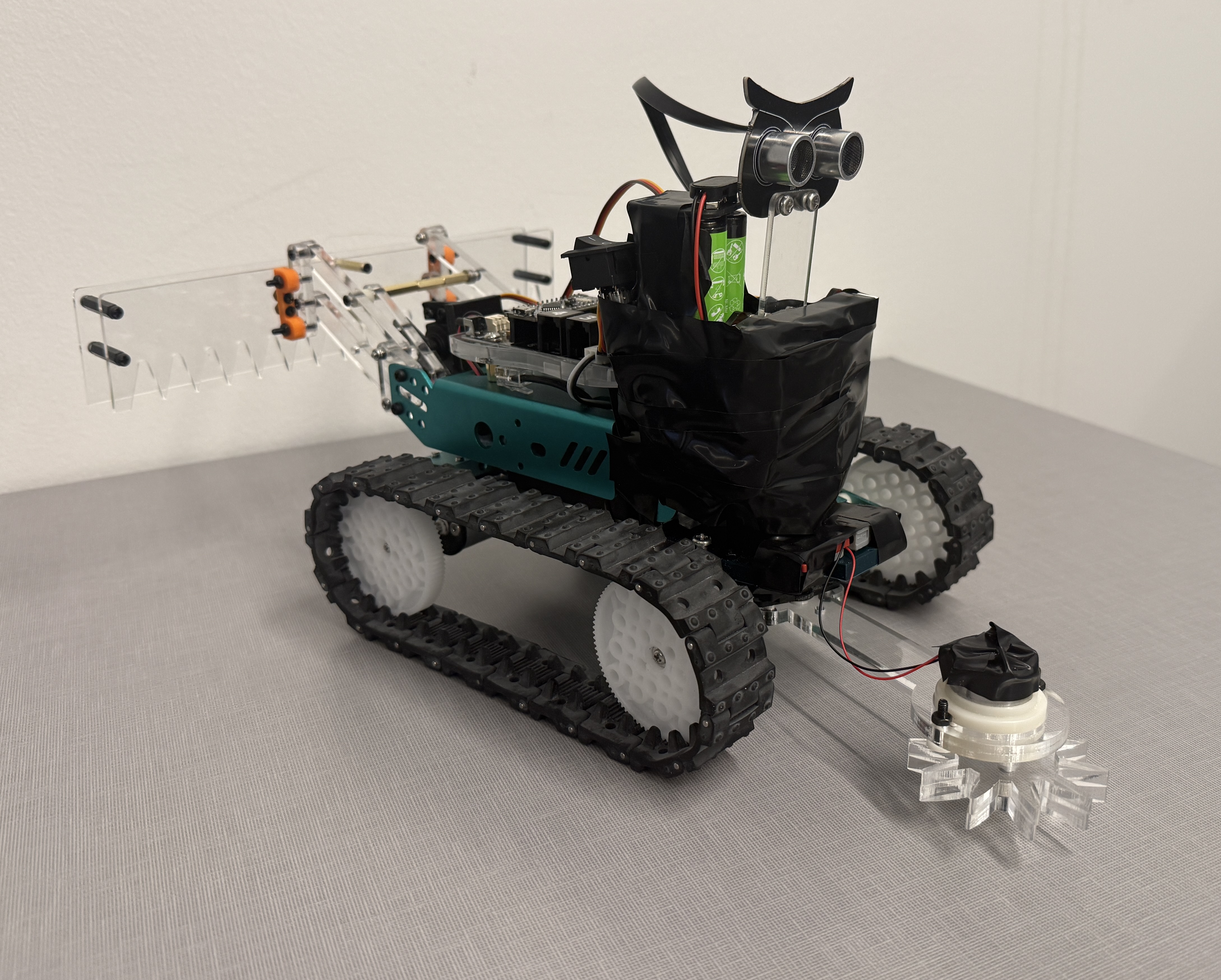
Traverses through rugged sand terrain and levels it as while passing by. We have a spinning sweeper that clears sand in front of the treads. On the back, we have a parallelogram four-bar linkage that holds two laser-cut rakes to properly level and flatten the sand that it drives over. This linkage is actuated by a servo and enables us to control the height of the rake, which allows us to do a high-pass and low-pass through the sand to gradually level it.
How we built it
We followed a traditional engineering design process to land on a functional design. Given the time constraints, we knew we did not have the luxury of extensive prototyping, so we spent our first few hours ideating and brainstorming. We researched different mechanisms used by industrial machines and built a web of ideas to draw from. We cross-referenced the design considerations listed in our project outline document and settled into a combination of designs. We took the concept of an MVP (minimum viable product) and created simple prototypes out of paper to make sure our ideas would work together on the robot. We each took charge of different mechanisms and began designing them in a shared CAD document. We brought together all of them in an assembly and then used laser-cutting and 3d printers to assemble each mechanism. We quickly iterated on many different parameters and ended up with the final design of our robot.
Challenges we ran into
Along the way, we faced many different challenges. Once we attached the front spinner mechanism, we saw that our ultrasonic sensor began reading inconsistently; the angle of the mount on the kit and the constantly moving large spinner right under the line of sight of the sensor led to random triggering of our logic in the code. We were then forced to part ways with the large roller in the front and increased the size of the sweeper to counteract it. We also faced issues controlling the motors with the Arduino, so we created our own custom circuitry to control the sweeping motors. We also noticed sand getting trapped in the treads, so we created a guard to stop most of the sand from entering through the side.
Accomplishments that we're proud of
We were proud of all of the mechanisms we designed. Our four-bar linkage worked exactly how we wanted it to, with the linkage being easily driven by our servo. Our sweeper and front roller were also both able to move large amounts of sand in the pit, making it much easier for the rakes to level it.
What we learned
We all learned to work under an intense time crunch. None of us have had to create something with these many capabilities with this short of a turnaround. It has taught us some of the inefficiencies in our current workflow that hold us back while refining the design. It also taught us how to split up tasks optimally, tailored to the strengths of each of our team members.




Log in or sign up for Devpost to join the conversation.