-

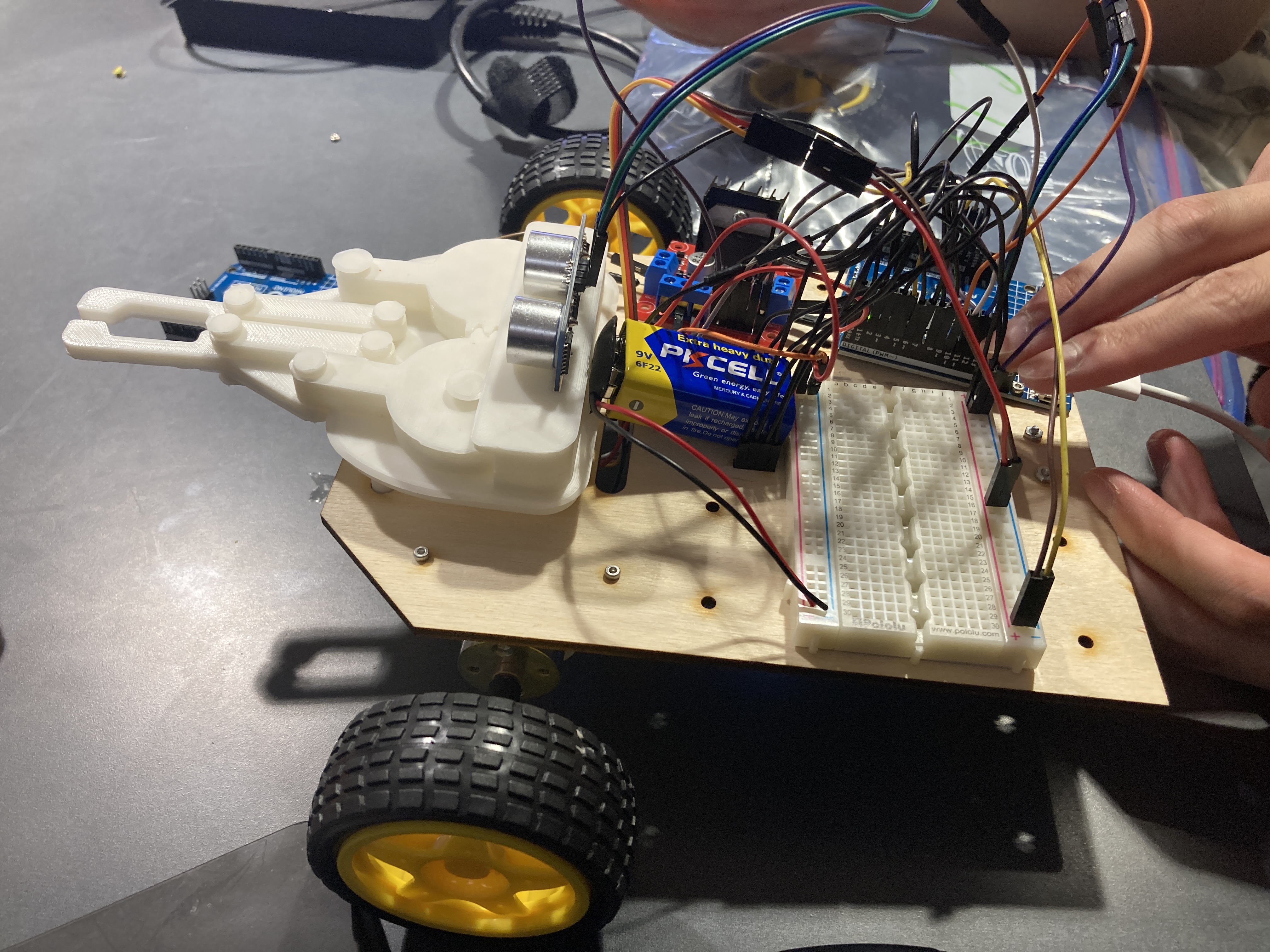
The claw
-
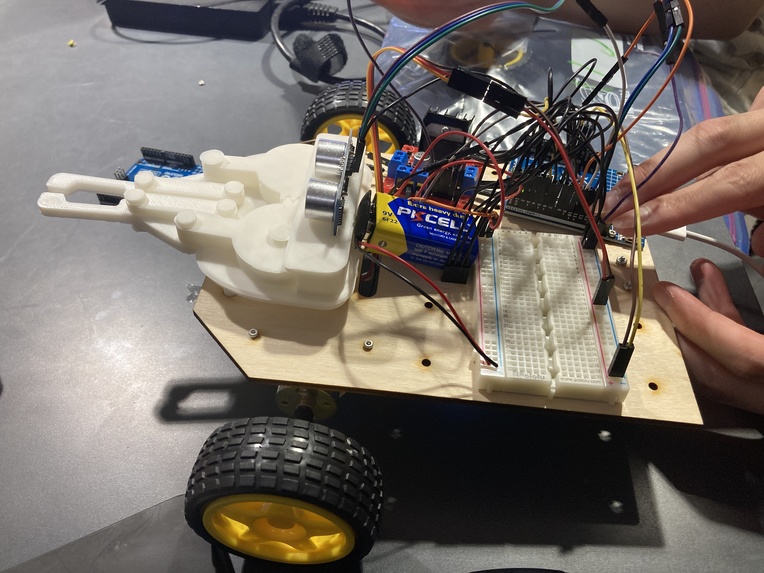
The entire robot

Inspiration
We were inspired to name our bot Izack the Alligatr by how the claw kind of looks like an alligator mouth from the side.
What it does
Finds the the center of 5 concentric coloured rings. Navigates a maze of coloured squares. Detects colours in a grid of Red, Green, Blue in a specified order.
How we built it
Closed challenge, we had an arduino kit provided to us. We screwed our components into the given base, connecting various boards and sensors needed.
Challenges we ran into
Getting our arduino board detected by PlatformIO. Making sure all components were correctly wired, and adjusting pinouts to ensure that all components can be controlled by the arduino.
Accomplishments that we're proud of
Getting our claw to successfully interface with the servo to open and close. Getting the wheels to spin.
What we learned
Wiring is a pain, need to bring more jumper wires! Also, colour coding jumper wires is a must with debugging the breadboard.
What's next for Izack the Alligatr
We add a more powerful battery to power the motors (>9V) so that the robot can move faster.

Log in or sign up for Devpost to join the conversation.