-
-
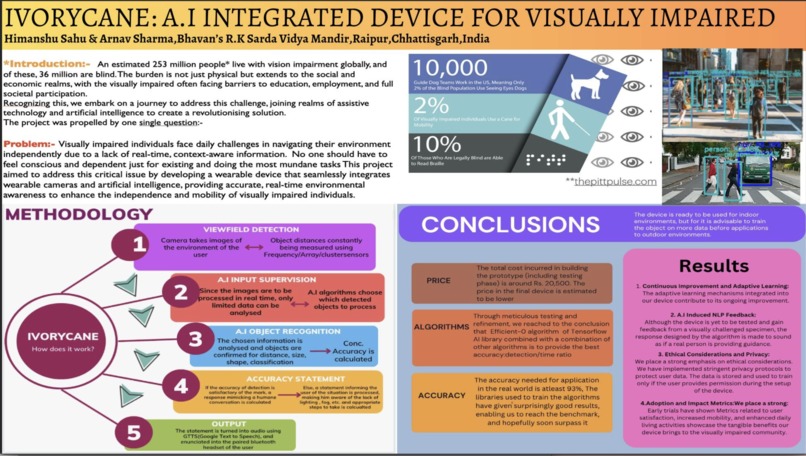
QuadChart
-
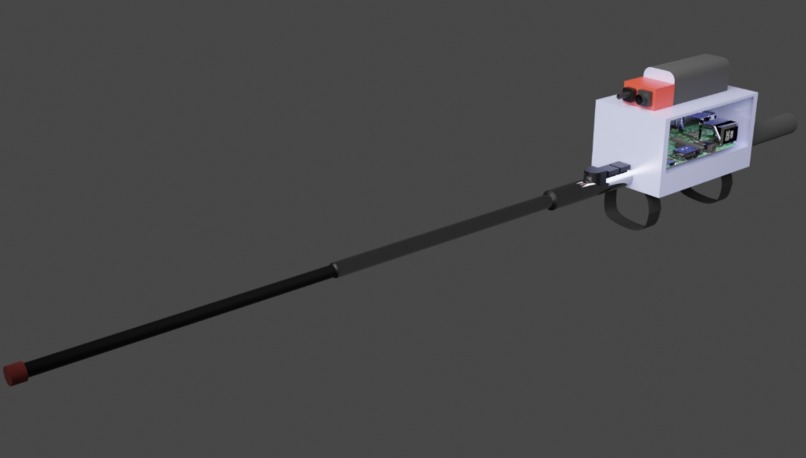
3-D Model
-

Ist Prototype
-
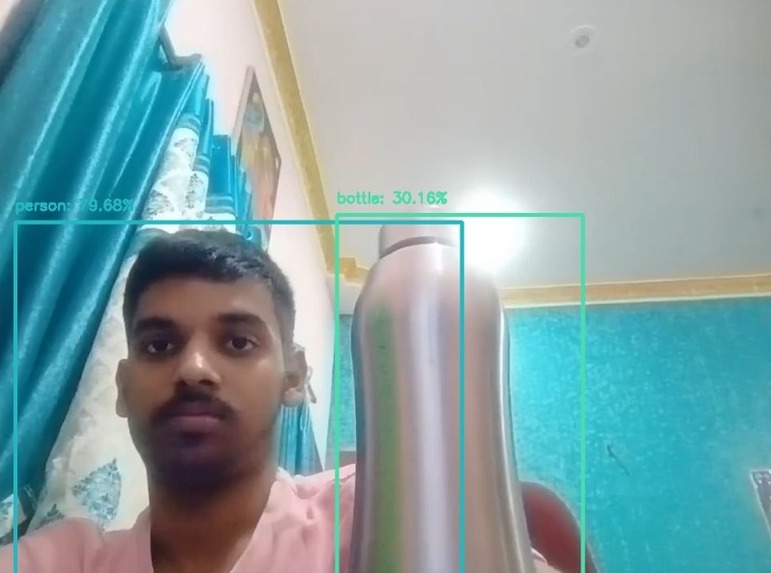
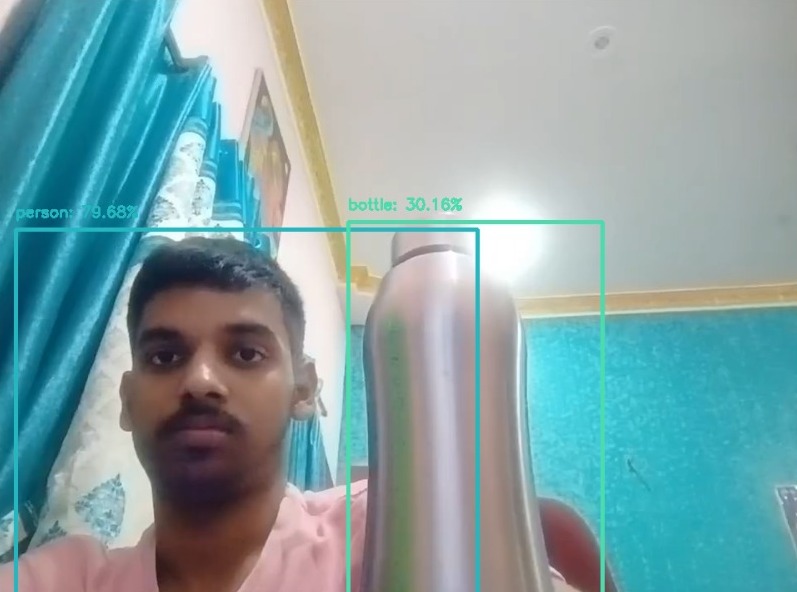
First Human Detection
-

Recognitions at IIT-KGP
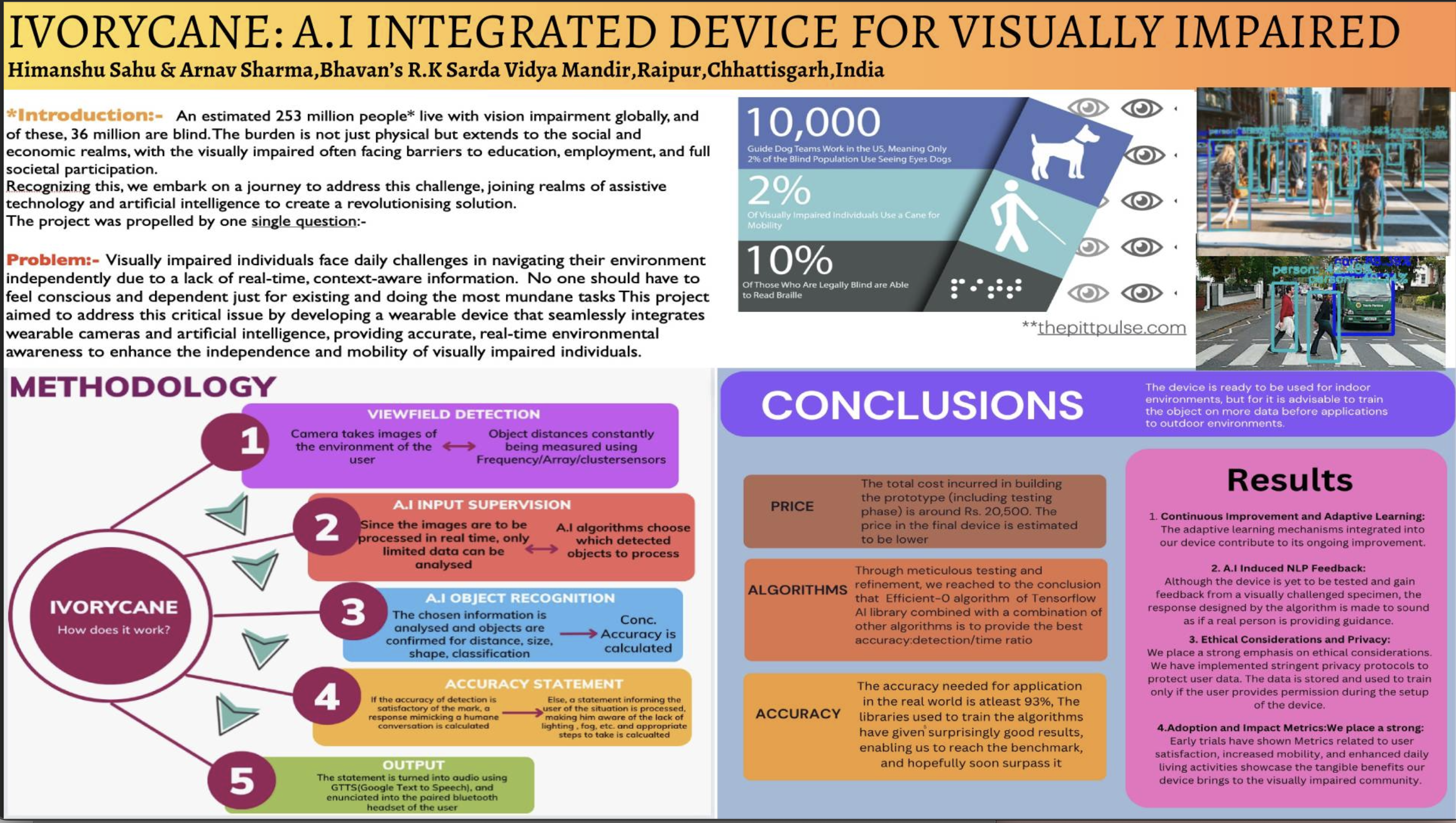



Introduction
There are a reported 70 million visually impaired(MSVI) people in India alone(more than 250 million worldwide)*, out of which over 15 million are completely blind, on the global scale this number is much higher. The ways in which visually challenged people have to navigate throughout their lives has not seen an innovation or been revolutionised in over a 100 years. Our aim is to use today's A.I Technology, and give blind people their sense of independence back. So that no one has to be dependent on expensive guide dogs, assistance of another human or outdated white canes.
What it does
Standing as a solution to the challenges faced by the visually disabled. IvoryCane uses computer vision, along with LiDAR, SONAR, UltraSonic Sensors, etc to gather input of the environment in real time. The information is then processed using Neural networks to analyse the combined data, and then calculate appropriate, intricate- humane suggestions and directions. This fusion ensures real-time, object-oriented assistance, marking a significant departure from existing solutions. Most importantly, we have distinguished ourselves by developing custom algorithms and codes using advanced ML and A.I Libraries, enabling us to, for the first time integrate object detection oriented guidance. Google Tensor Flow for Computer Vision and Face Detection, Access to newer data training sets ensures higher accuracy, which keeps on increasing as the algorithms are constantly learning. IvoryCane is a way to take the field of Assistive Tech beyond providing basic assistance. IvoryCane brings the vision of a world where no person has to rely on somebody else simply to ensure the safety of their lives, for the most basic tasks. Ivory Cane algorithms are being trained to detect accidents, provide live traffic updates, and translate character recognised text into the language of the user’s choice. Which in turn means less reliance on things like Braille or humans(human assistance at the supermarket, crosswalks, outdoors, etc).
How it does it(how it works)
To provide real-time response to the visual field of the user, IvoryCane is constantly taking in information(Distance, Colour, Depth, Movement, etc) about the environment using cameras and sensors such as LiDAR, SONAR, etc. The collected information is sent to our codes running on a raspberry pie attached to the device, where the images are refined and then sent to be analysed into several algorithms working together to come to an in-depth breakdown of all the sections in the image, This is enabled through custom algorithms using advanced tools like Google Tensor Flow and AI models trained under thousands of conditions. Along with visual field and object detection, our model can also be trained upon facial detection, greatly increasing its usability. The algorithms analyse, and proceed with only the information most relevant to the user in the scenario. The processed output is then spoken into the user’s ears through a headset in a well crafted humane response providing appropriate guidance
Challenges we ran into
- During the incubation and testing phase it was challenging for us to explain the use of the device to the visually challenged people from rural areas. Getting an accurate review of their experience was paramount since ultimately the final product was to be designed for them.
- It was also challenging to continue working on the project due to the amount of money we had to spend from our pocket money to keep testing different kits, micro processors, battery packs etc. The vastness and complexity of the subject was also intimidating at times.
Accomplishments that we're proud of
IvoryCane has already won multiple local science fairs and 1 major National fair in India. Apart from this We were also invited as a guest speakers to multiple top University level science exhibitions in CS/IT Universities in India (Known as IITs and NITs)
What we learned + Accuracy(avg)-
Based on several tests(experimental protocols attached), our results came out to: Object Detected: 96% Facial Detection: 93% Depth: 91% Velocity(dynamic objects): 76-89% Distance computed: 98.99% To be deployed as a fully functional independent guidance system, IvoryCane is still in need of a lot of work, but results such as these are very motivating for us to keep working on the device. Apart from this, during testing, when we actually get to see a visually challenged person get to use the cane and perform an independent action, maybe as simple as walking around an unfamiliar room, without any other human's help, it reminds us why we started working on this in the first place.
What's next for IvoryCane
- Since we need much more accurate results, and much more testing data to get an accurate assessment of the cane's usefulness as an independent system, our plan is to keep working on this. For now we're focusing on expanding the Dataset of the Cane which might require more computation al power than we have.
- High cost is also a problem that we prioritize to solve. If we're not able to reduce the final cost of the product, it might be useless since the individuals from rural areas will not have access to it. Even partnering up with public welfare entities for production will help to a small extent only.
Built With
- googlenet
- keras
- resnet
- tensorflow


Log in or sign up for Devpost to join the conversation.