-
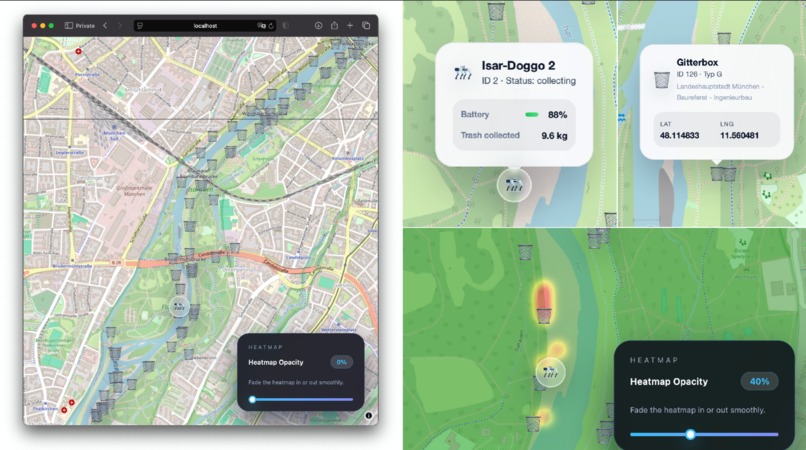
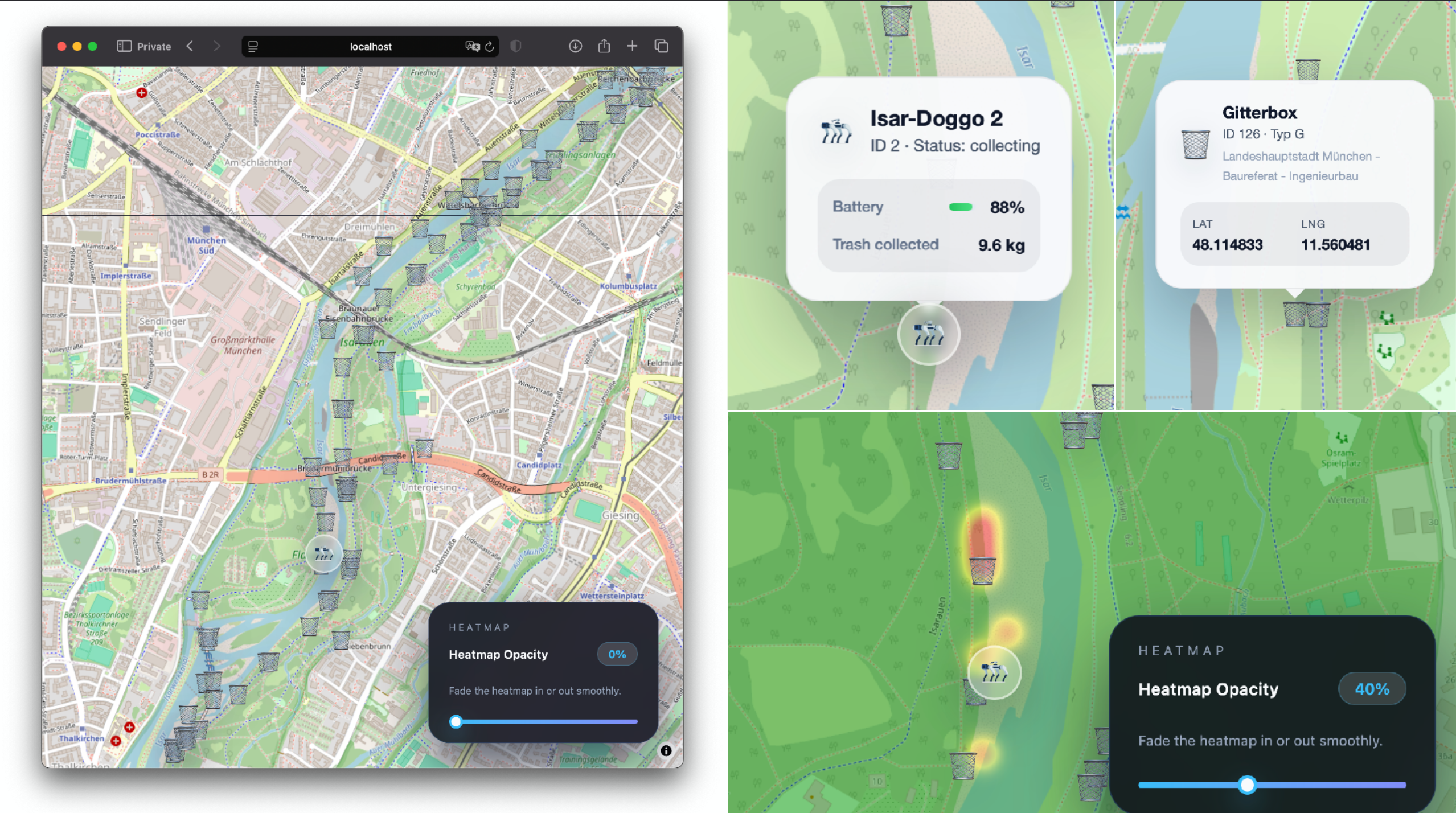
Screenshots from our webapp
-

Concept of the robot

Inspiration
Our goal was to come up with something novel, that brings Munich to the forefront of using digital technologies and reducing environment pollution.
What it does
We propose a fleet of four legged robots with a mechanical gripper arm and a garbage container. The robots walk and navigate autonomously in specified areas. They detect trash items by using the state of the art, open source, vision model "sam3" by meta. Every time a trash item is detected, the robot sends it exact location to the database. Through this, we can generate a real time heat map of trash distribution along the Isar and detect hotspots in our webapp. There you can also track the robots and monitor their battery status and trash amount collected. You can also find all public bins available, with more information about category and exact location.
How we built it
Detection: sam3 vision model; Webapp: React + Vite
Challenges we ran into
No actual robot
Accomplishments that we're proud of
Providing a innovative solution that helps our environment and keeps the city clean.
What's next for IsarCleanBot
Implement our idea into a real four-legged robot.
Built With
- react
- sam3
- vite



Log in or sign up for Devpost to join the conversation.