-
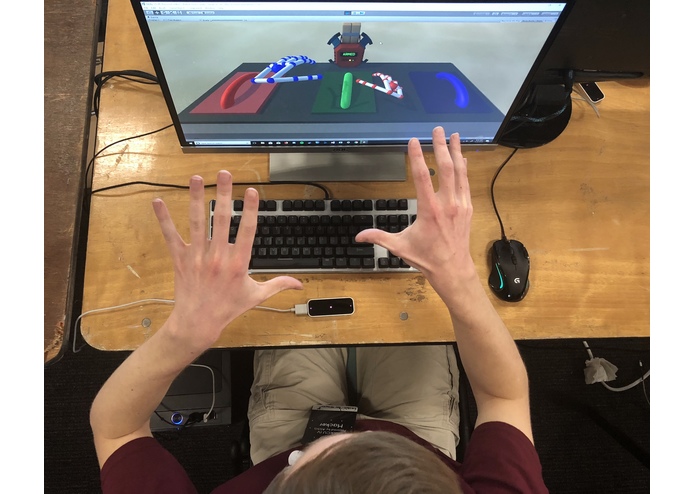
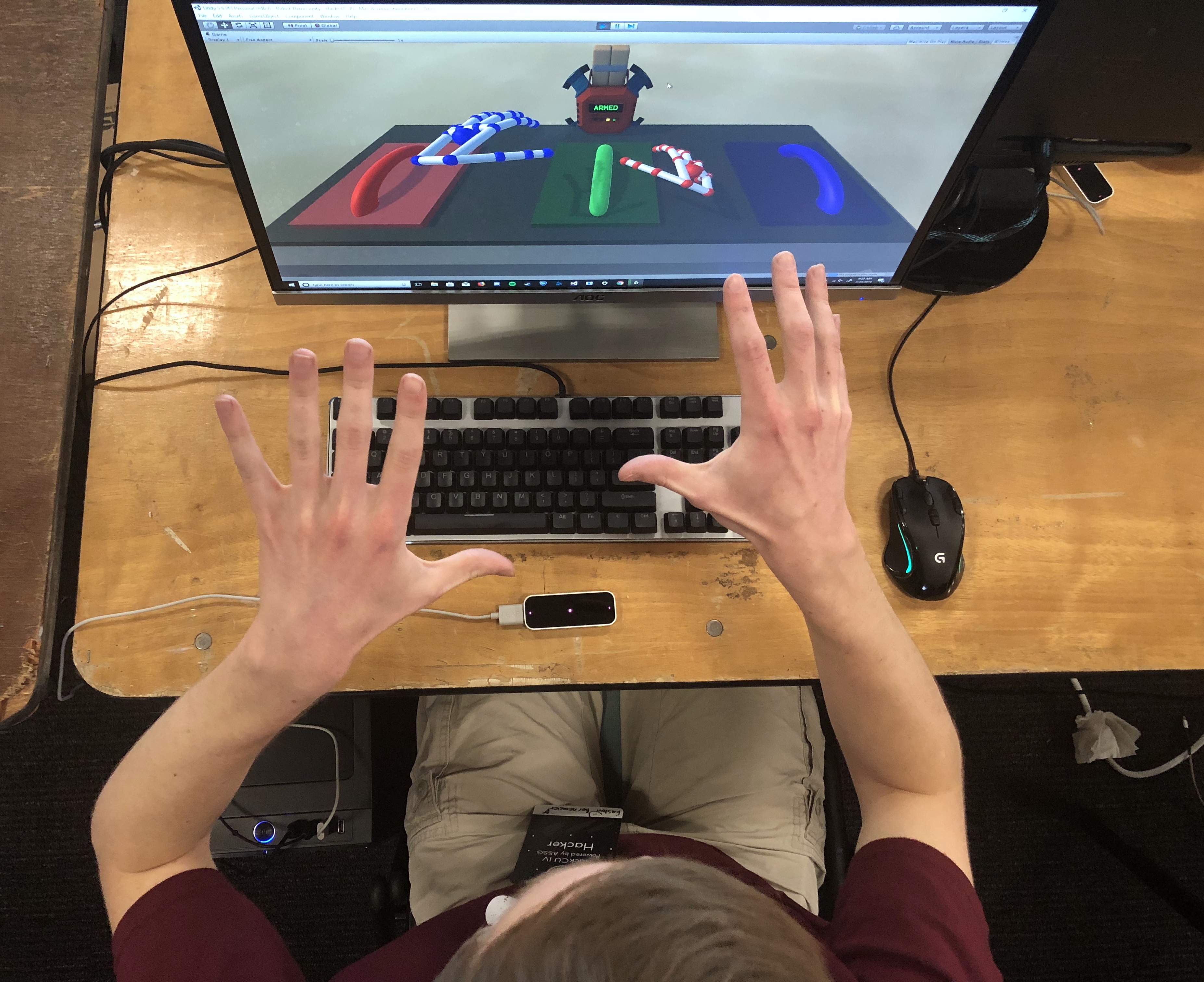
Demonstration of hand recognition
-

The Team
-

Our Project Logo


Inspiration
With IRMI (Intuitive Remote Manipulation Interface), we aim to:
- Remove humans from life-threatening situations
- Give humans access to otherwise inaccessible areas
What it does
Allows users to transmit precise hand movement data to remote locations through the use of:
- The Leap Motion
- Long-range data transmission
- JSON data parsing
- A dexterous robotic hand
How we built it
Since we were unable to obtain a robotic hand, we built a simulation in Unity to model a potential use for our product. We chose a bomb defusal because we observed the following issues with current bomb defusal techniques:
- Limited range of motion in robots
- Non-intuitive control structure We were able to improve on these limitations with IRMI by adding:
- Precise movements
- A natural and intuitive interface
- Distance between diffuser and bomb
Challenges we ran into
We ran into some issues with networking. Although C# offers a built in library for TCP/UDP, we had trouble serializing/deserializing the data. We were unable to get this to work, due to lack of integration of deserialization in Unity. There was also no Unix support for Unity/Leap Motion.
Accomplishments that we're proud of
- The unity interface and blender models function well and look good.
- Seamless integration of Leap Motion and Unity over USB
What we learned
- Leap Motion custom gesture recognition
- Basic network data transfer
What's next for IRMI (Intuitive Remote Manipulation Interface)
There are several future applications of IRMI: Military
- Bomb defusal
- Training simulation
Medicine
- Long-range surgery
- Microscale surgery
Space Operations
- Space station repairs
- Scientific analysis
Remote Earth Operations
- Hazmat
- Volcanic analysis



Log in or sign up for Devpost to join the conversation.