-
-
A natural layout for the input pins
-
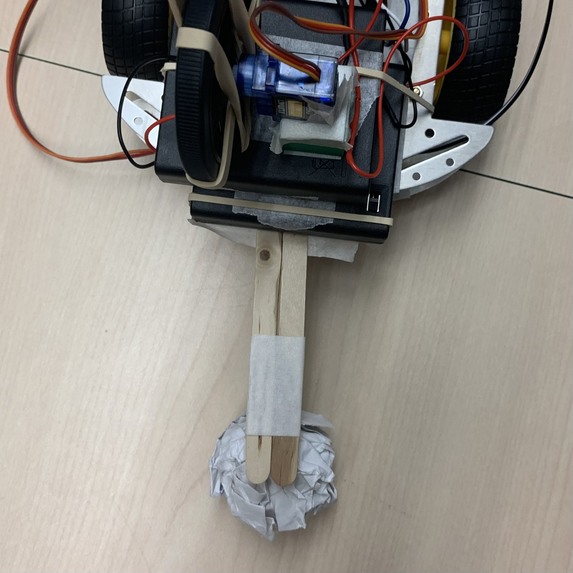
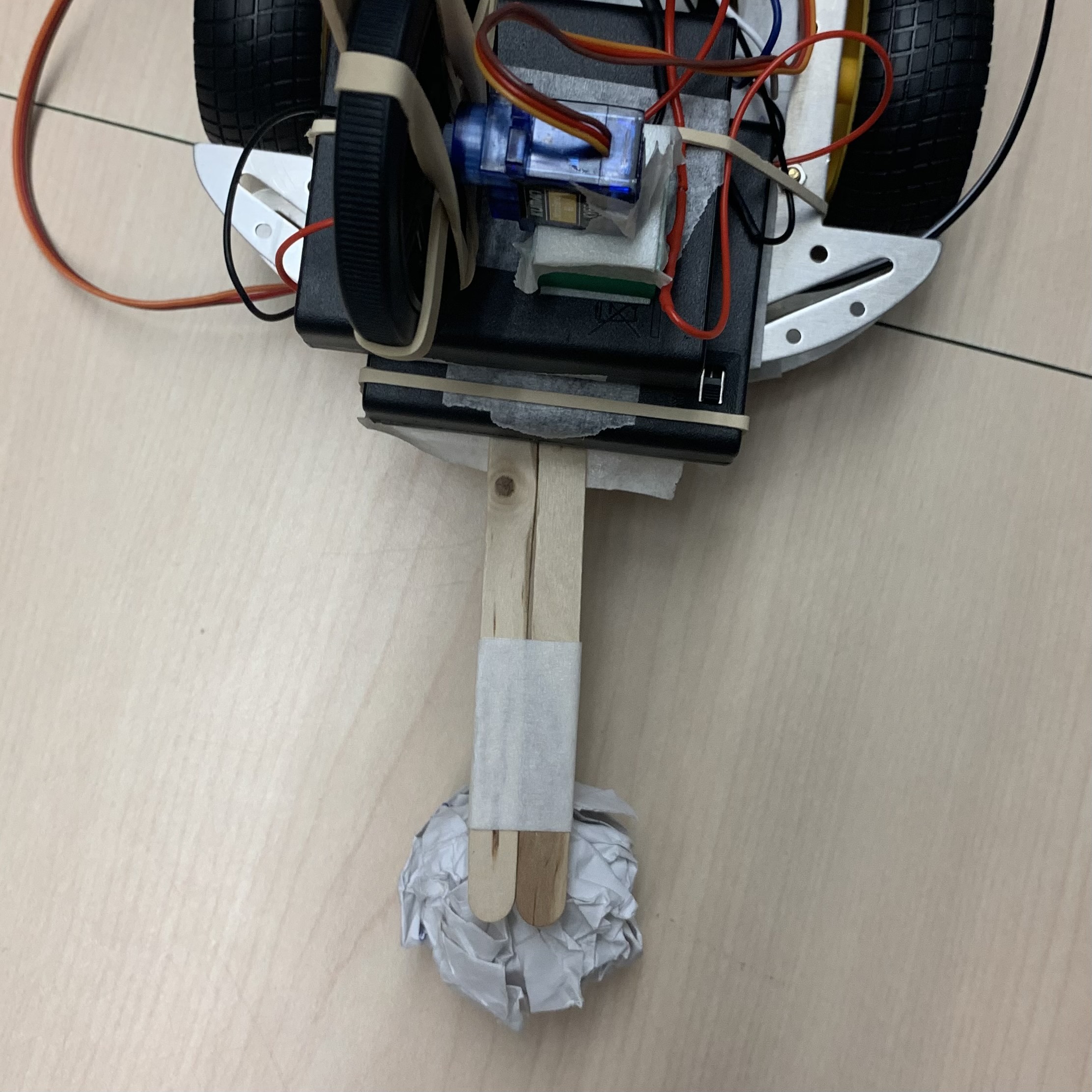
A ruler to adjust for ball dragging
-
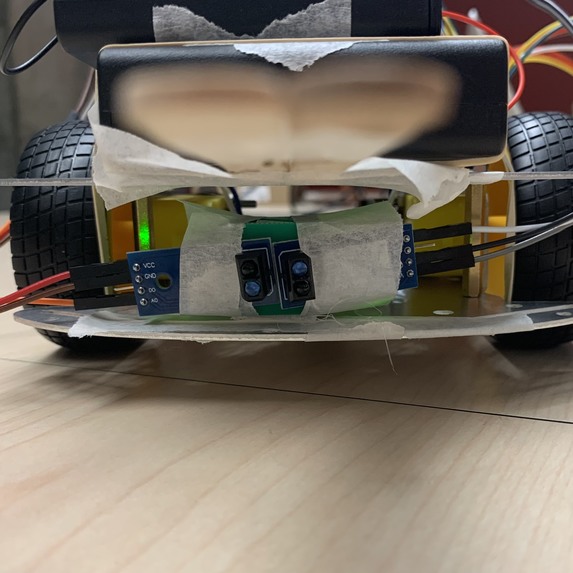
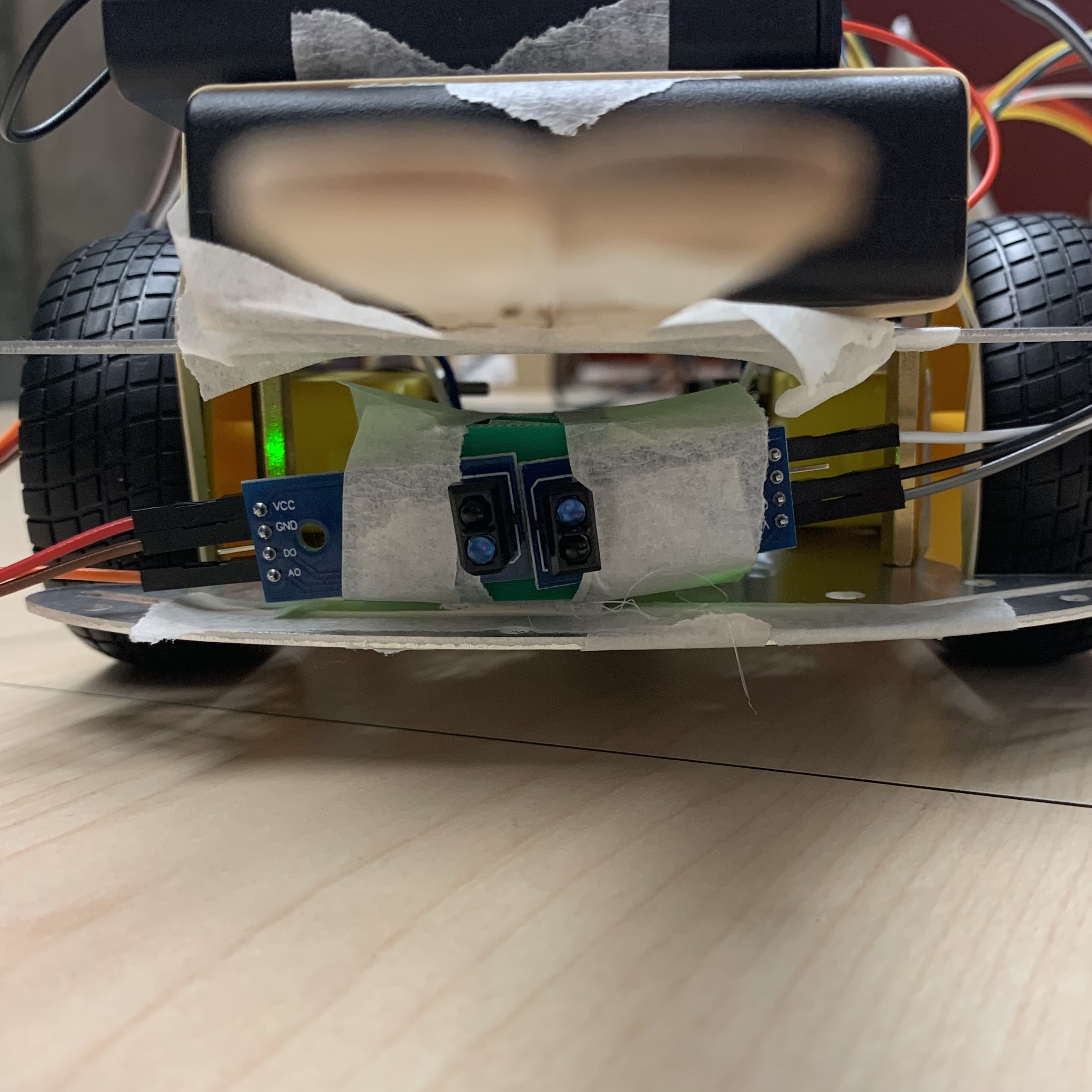
The IR sensors
-
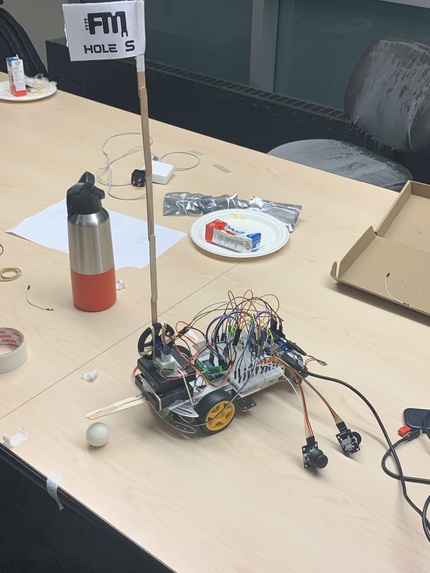
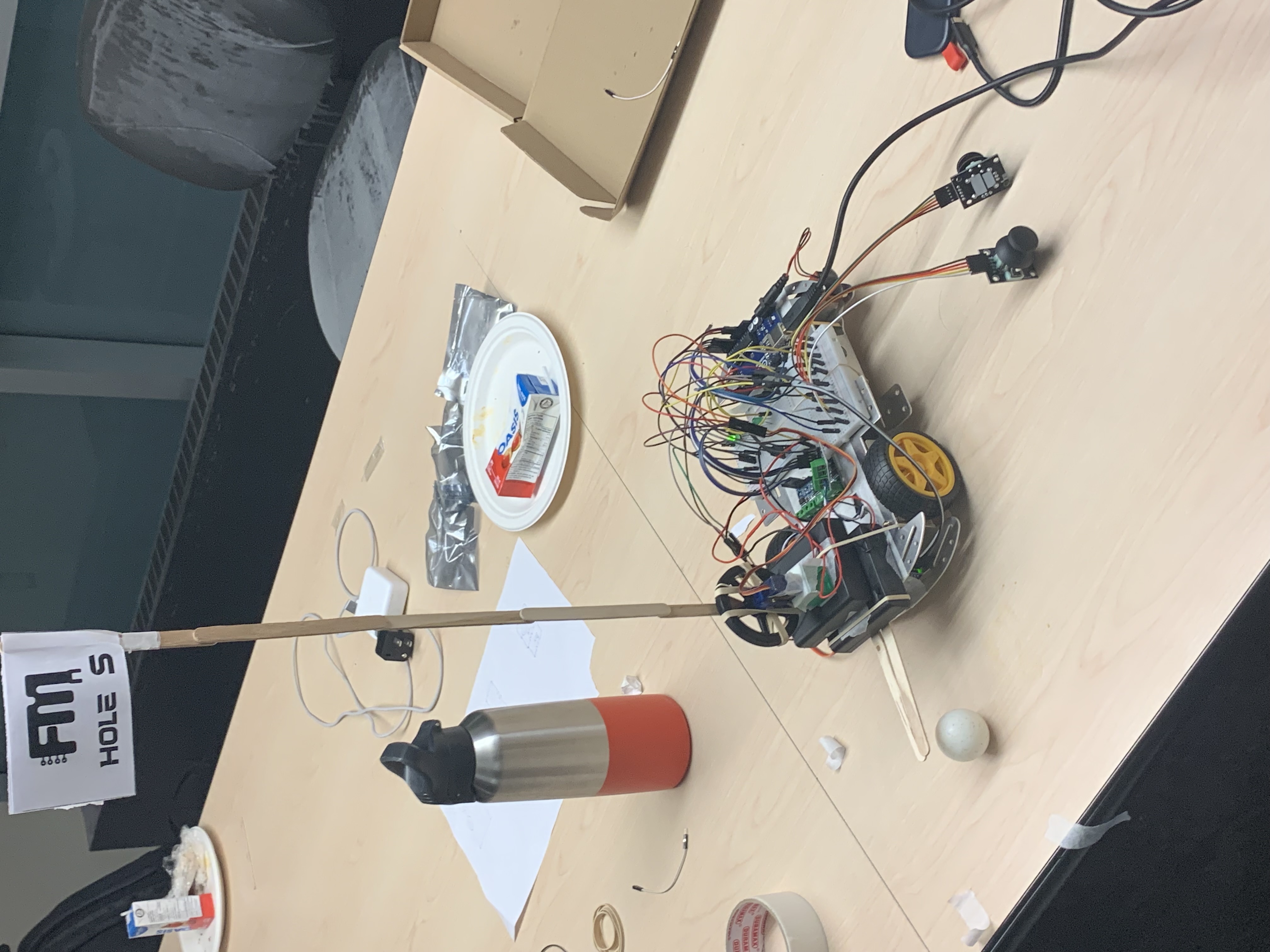
The entire robot
What it does
Our robot transforms the game of mini golf. It plays by ramming into the ball, it guides the user with manual aim assist stick for direction adjustments and an innovative IR sensor for autonomous aim assist. This sensor automatically calculates the optimal angle for the robot, ensuring a perfect hit every time.
How we built it
We embarked on this project with a blend of computer, electrical, and software engineers. Our development process involved iterative testing, with a focus on integrating the manual and autonomous systems seamlessly to achieve precise control and autonomy in gameplay.
Challenges we ran into
Our journey was fraught with challenges, notably a motor controller failure due to a short circuit—a testament to the complexities of managing multiple electronic components in a confined space. Additionally, we faced issues with the robot dragging the ball, which required us to rethink our approach to controlling the ramming force and movement.
Accomplishments that we're proud of
Overcoming the technical hurdles and seeing our robot play mini golf with precision and a certain level of autonomy is our greatest achievement. The successful integration of the manual and IR sensor-based autonomous aim assists while making sure the controls are intuitive for the user , ensuring that each ram is both accurate and consistent, stands as a testament to our team's persistence.
What we learned
This project was a profound learning journey in problem-solving, interdisciplinary collaboration, and the application of robotics to real-world scenarios. We gained insights into the importance of cable management, the intricacies of sensor integration, and the balance between manual control and automation in robotics.
What's next for IR assisted ramming mini-golf club
If we were to continue with this project, we would aim to implement a higher level of automation. To achieve this, we initially planned to add QR codes on top of the robot and at each corner of the mini golf map, enabling a mounted camera to precisely track the robot's movements. However, due to time and equipment constraints, we were unable to implement this idea. This level of automation could even enable us to automatically plot the best possible course on each map.

Log in or sign up for Devpost to join the conversation.