




Inspiration
*** SEE GITHUB LINK FOR BOTH DEMO VIDEOS (Devpost limits to only one video) ***
Taking care of plants is surprisingly hard. Let's be honest here - almost everybody we know has lost a plant or two (or many) due to poor maintenance. Appliances and tools within our homes are adopting the newest technologies and becoming increasingly automated - what if we apply these advancements to plant care? How far can we take it?
Our group is also interested in the artistic side of the project. Nature and technology are often at odds with one another; we are constantly reminded of the toll that industrialization has taken on our environment. But is it possible to create something where technology and nature coexist, in a symbiotic relationship?
What it does
The iPot Lite is, at its core, an autonomous flower pot. The iPot Lite has two main functions: First, it is able to track and follow the location of brighter light sources (such as sun pouring in through a window) in order to give its plant maximum exposure. Secondly, when watering is required, the plant can seek out a fountain location using its camera system and drive over. We envision a system similar to a hand sanitizer dispenser, except filled with water.
How we built it
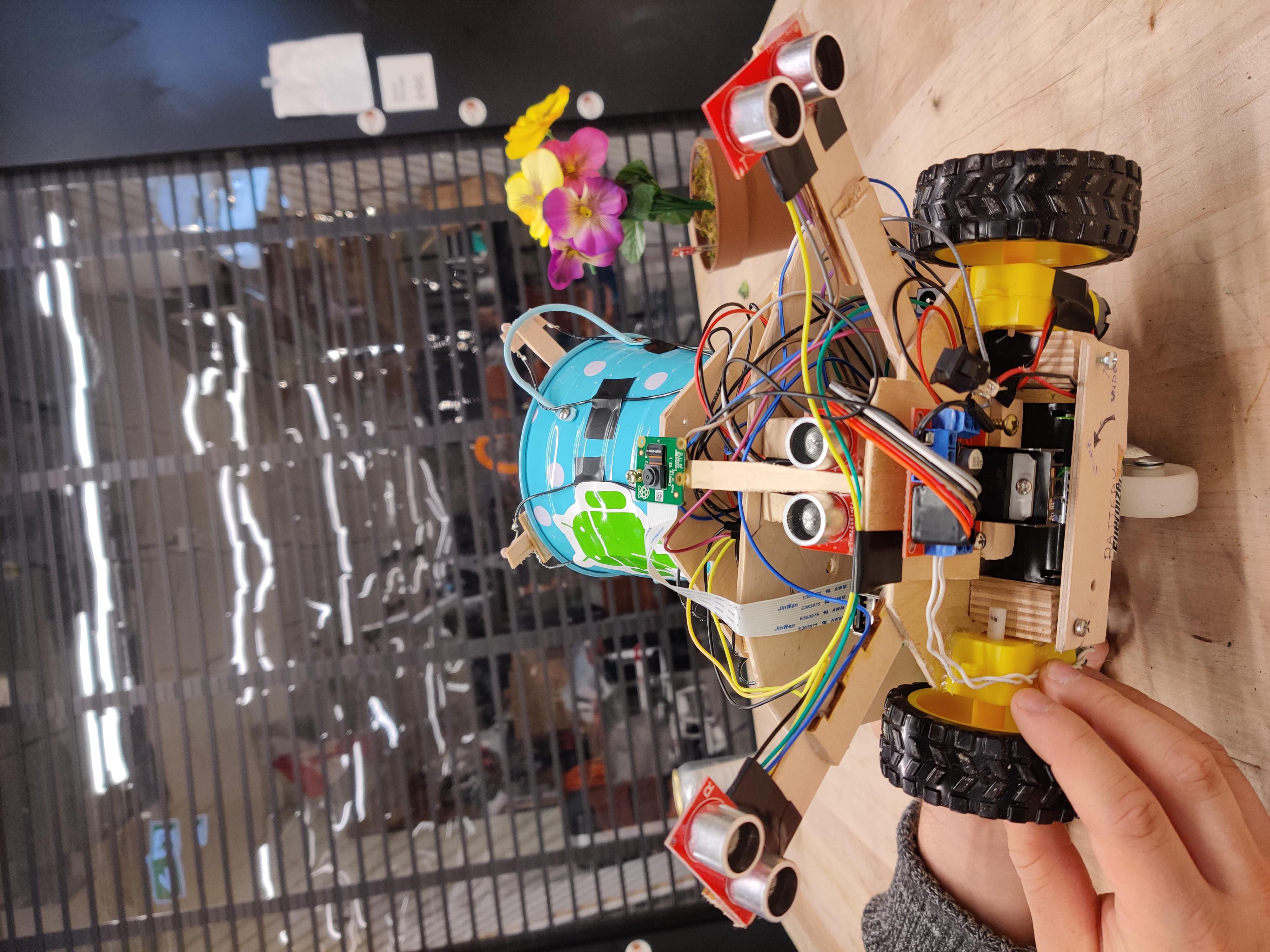
The flower pot sits on a mobile base driven by two DC motors along with a caster wheel, which allow it to traverse a wide variety of surfaces. The majority of the prototype is built from wood. The processing is handled by an Arduino Uno (driving, edge detection, light detection) and a Raspberry Pi 4 (image recognition). Photoresistors mounted near the top of the pot allow for tracking light sources. Ultrasonic sensors (downwards and forward-facing) can track walls and the edges of surfaces (such as the side of a coffee table). A camera mounted on the front uses OpenCV to extract, isolate and recognize specific colors, which can be used to mark fountain locations.
Challenges we ran into
We experienced major issues with camera implementation. The first camera we tried could not be powered by the Pi. The second camera was impractical to use, as it did not have a common interface. The third camera was found to be too slow (in terms of frame rate). The fourth camera was broken. We finally found a fully functional camera on our fifth attempt, after several hours of troubleshooting. Space limitations were also another concern - the footprint of the robot was quite small, and we realized that we didn't have time/resources to properly solder our circuits onto breakout boards. As such, we had to keep a breadboard which took up valuable space. Powering different components was also difficult because of a lack of cables and/or batteries. Finally, fabricating the physical robot was difficult since shop time was limited and our project contains a lot of hardware.
Accomplishments that we're proud of
The two main functions of the iPot Lite as described are generally functional. We were quite pleased with how the computer vision system turned out, especially given the performance of a Raspberry Pi. We worked extremely hard to create control logic for tracking light sources (using estimated direction of light vectors), and the final implementation was very cool to see. The custom chassis and hardware were all built and integrated within the makeathon time - no earlier design work was performed at all. The final idea was only created on the morning of the event, so we are quite happy to have built a full robot in 24 hours.
What we learned
Hardware selection is critical towards success. In our case, our choice to use a Raspberry Pi 4 as well as our specific set of chosen sensors greatly influenced the difficulties we faced. Since we chose to use a Raspberry Pi 4 with micro-HDMI output, we were not able to interface with the board without a headless SSH interface. The Raspberry Pi Camera worked remarkably well and without much difficulty after failing to integrate with all of IP webcams, USB Webcams, and the M5 Camera. We initially wanted to use the Huawei Atlas, but found that its power requirements were too high to even consider. We learned that every hardware choice greatly influenced the difficulties faced towards project completion, as well as the choice of other hardware components. As a result, integration and communication is incredibly important to discover incompatibilities where they exist in the initial designs, and the most successful strategy is to integrate early and iterate across all features simultaneously.
What's next for iPot Lite
We really wanted to add wireless charging or solar panels for total self-sustainability, but unfortunately due to the limited parts selection we were unable to do so. We also wanted to create additional tools for things like data logging, reviewing and settings configuration. A mobile companion app would have been nice, but we didn't have time to implement it (could be used for tracking plant health). We toyed with additional ideas such as a security camera mode using motion detection, or neural-net based plant identification. Unfortunately due to time constraints we weren't able to fully explore these software features, but we were glad that we finished most of the hardware.
Built With
- arduino
- battery
- breadboard
- c++
- camera
- motors
- opencv
- photoresistors
- raspberry-pi
- ultrasonic



Log in or sign up for Devpost to join the conversation.