-
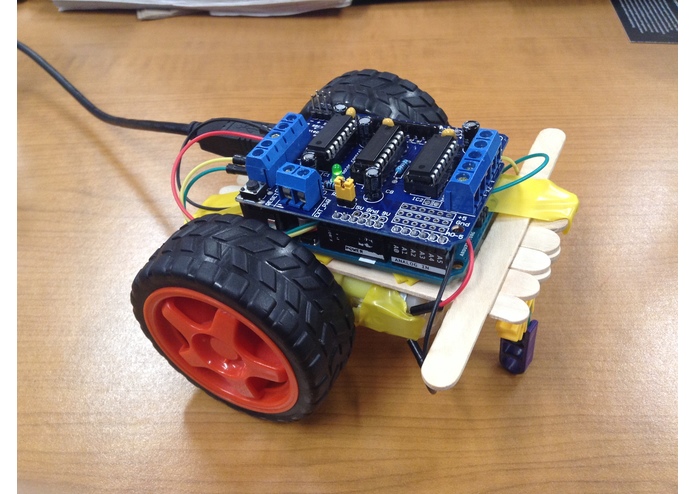
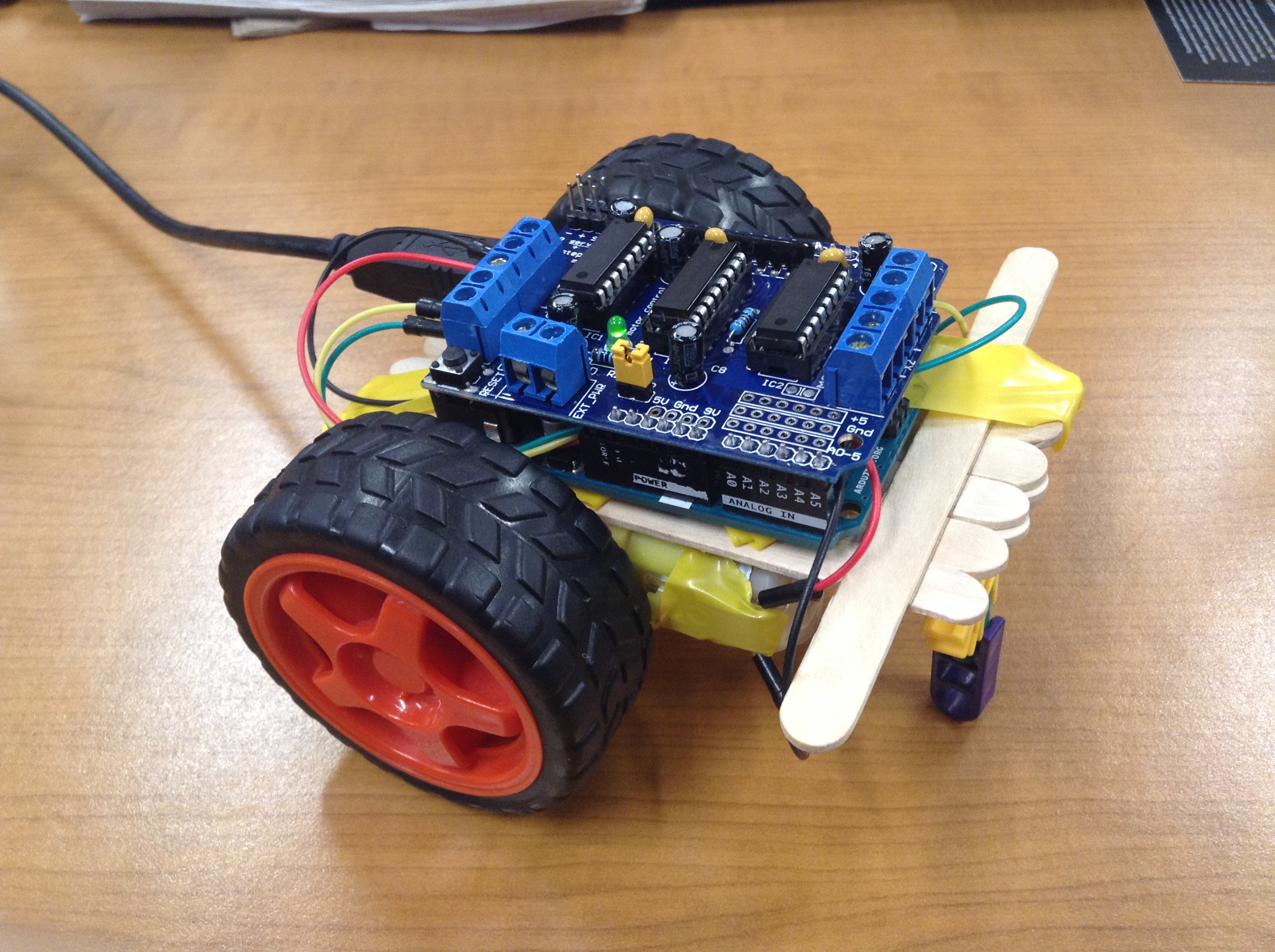
The robot
Inspiration
The internet of things. We have hardware and software specialists, and we wanted to take on a project that would challenge all of us.
What it does
It's a website that anyone can access and use to pilot a 2-wheeled robot. We had plans to incorporate live sensor data visualization and video streaming, but we were unable to achieve them due to inconsistent sensors and stream latency.
How we built it
We divided the work into 3 sections: Building and coding the robot, communicating between the robot and the website, and designing the website and user interface. The robot was powered by an Arduino Uno with an Adafruit Motor Shield. The website used html, css, javascript, and php. The robot used the Arduino language.
How it works
When someone opens the pilot interface on the website and presses a button, a text file is created in the public directory of the web server. The computer that is tethered to the robot has a script running that continuously checks if that file has been updated recently. It then downloads this file and tells the robot to move in a certain way depending on the contents of the text file.
Challenges I ran into
Bad sensors, limited hardware, and little experience with web development and servers. Also, we got a domain name that suited the project, but changing the nameservers to those of our hosting service took too long. We used a spare domain one of us had acquired previously.
Accomplishments that we are proud of
During testing, we video-called Akshay's relatives in India and had them access the website and control the robot. The latency was very similar to when we controlled it from here.
What we learned
Javascript PHP How to create and use a server
What's next for Internet Robot
The next steps would be to add a rich bank of sensors that would collect information from the robot's surroundings to be uploaded to the website. There, the data would be visualized in useful ways.

Log in or sign up for Devpost to join the conversation.