-

Q-Arm picking up luggages
-
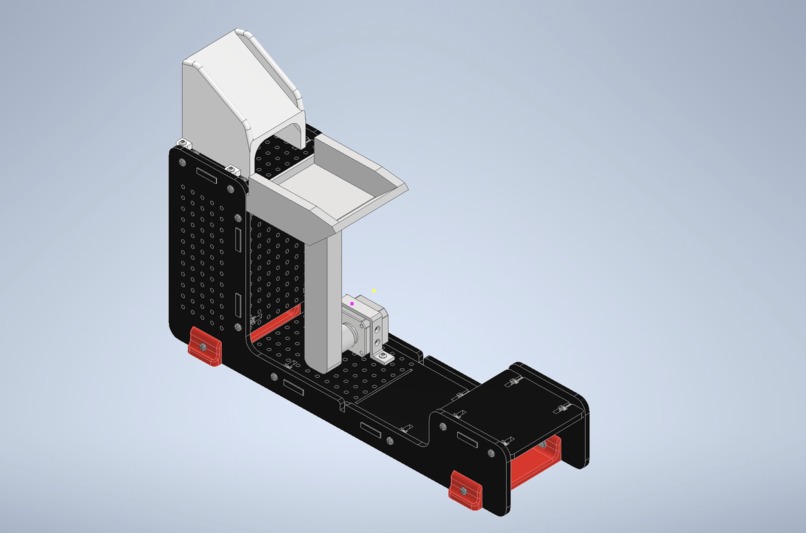
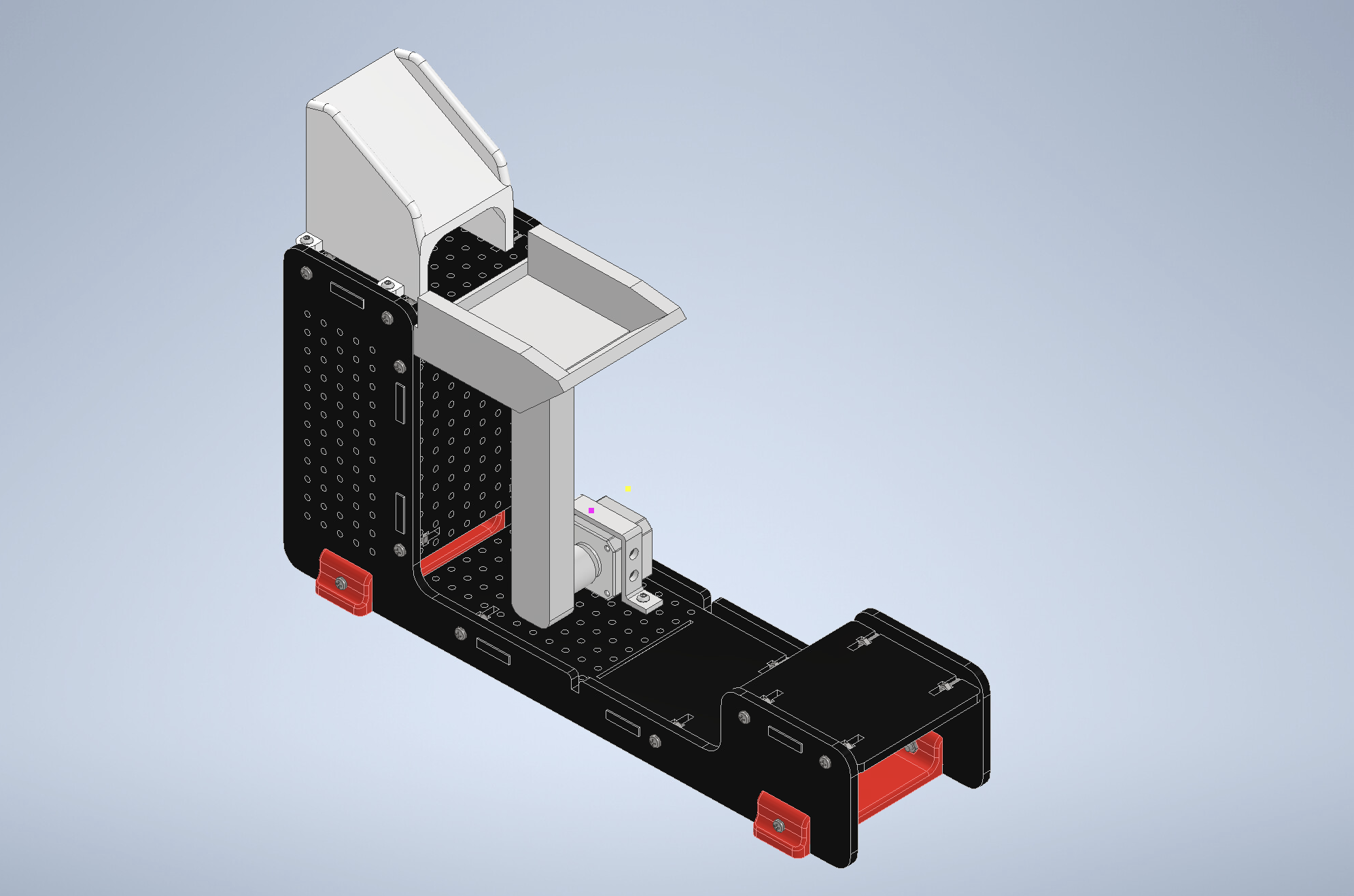
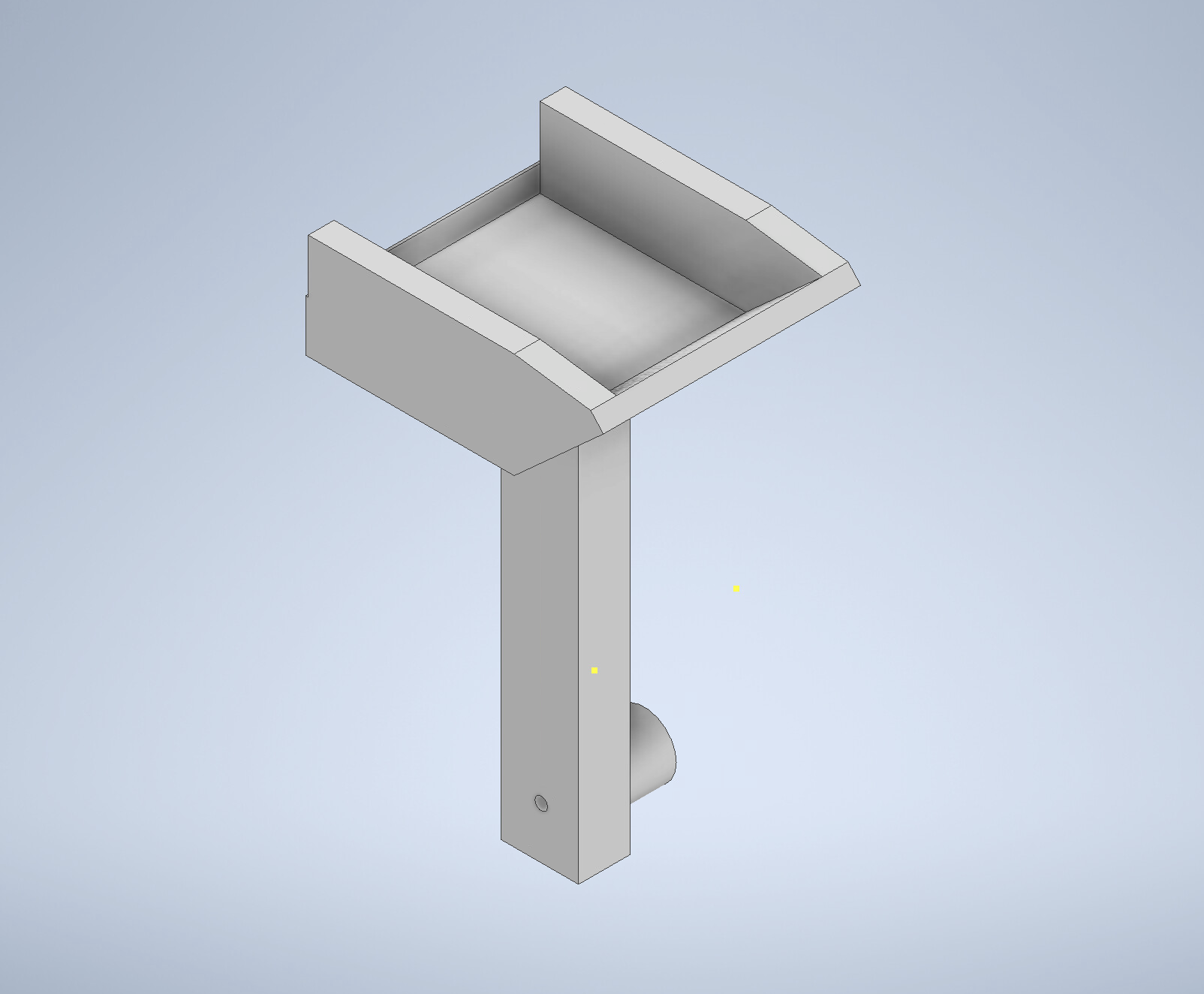
Mechanism displayed on Platform
-
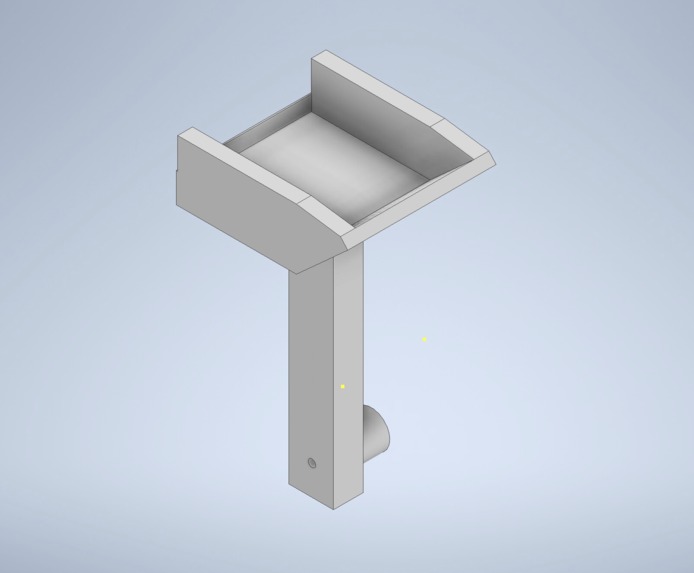
Mechanism Design
-
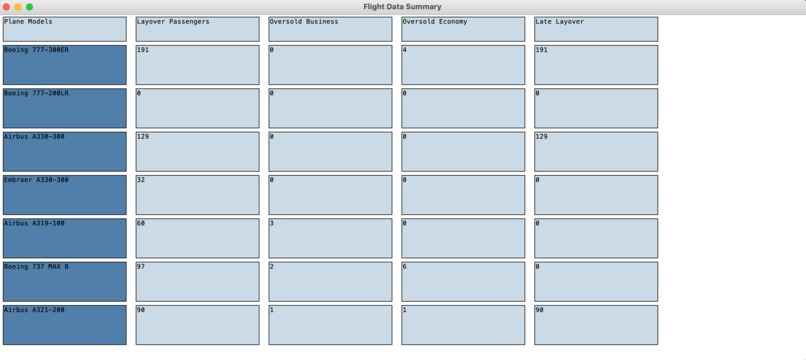
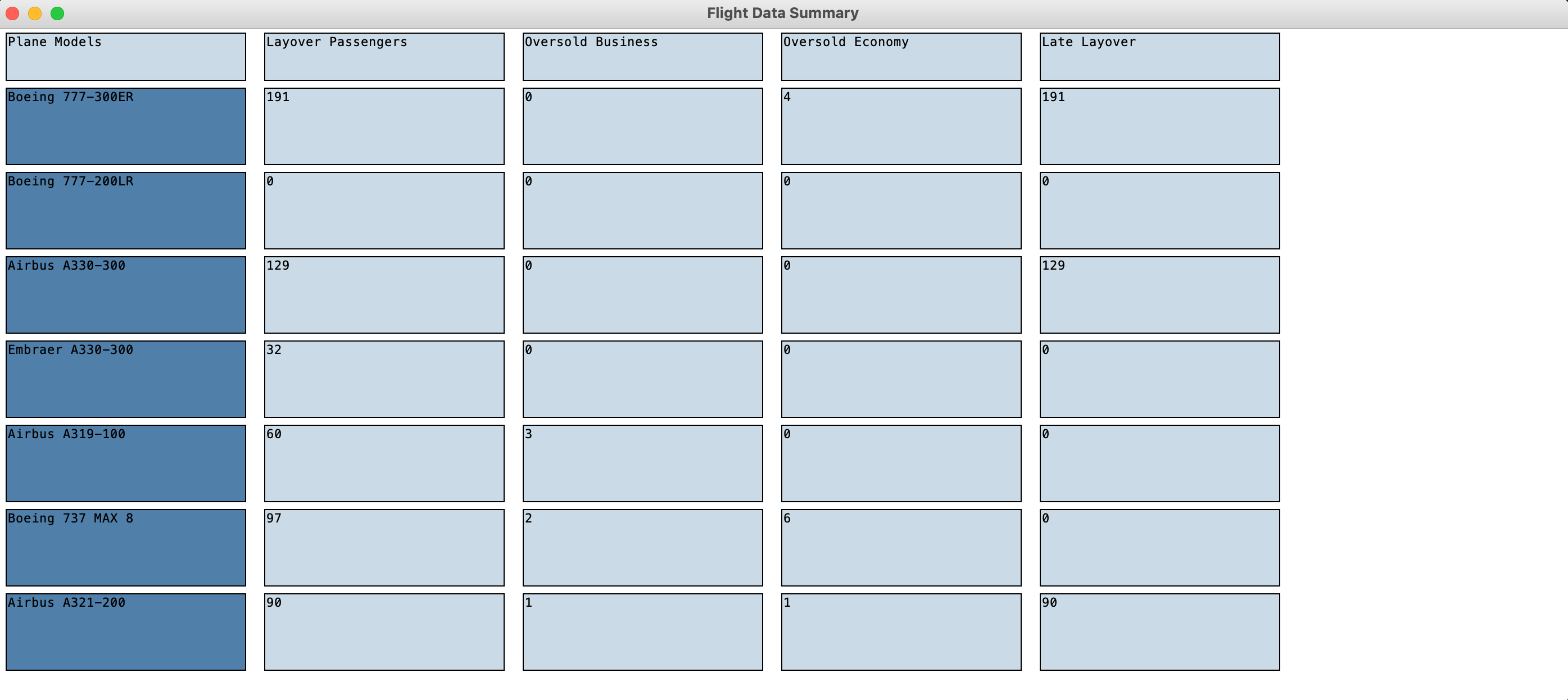
Airport Data Application

Inspiration
As global air travel continues to increase in popularity in our modern era, baggage handling becomes a prominent issue in every airline around the world. This project is to be used for luggage handling systems across all airports to increase the efficiency and speed of porters.
What it does
This project was initially implemented by using a rotary actuator, Q-arm, as well as a 3D printed slope for the luggage to be placed on before being transferred to platform B. Our solution was creating a rotatable lever arm with a transferring box, which is accurately positioned beneath the slope of the slide on platform A, and directly attaches to the rotary actuator, serving as a pivot point to transfer the luggage. The transferring box attached to the lever arm features a slope on one end to allow the luggage to transfer smoothly onto platform B without sliding or being dropped. By continuing to test the outcomes of the mechanism's ability to move and retract throughout this project, many improvements were made such as adjusting the weight of the mechanism which enhanced its overall ability to transfer the luggage and led to the success of our functioning mechanism.
Initial Preparations
When finalizing the design mechanism, several factors were considered. Although many different designs were discussed during meetings, the goal was to select a design that was concise and cost-efficient. Some designs were able to transport the luggage effectively but required numerous components and would be difficult to fabricate and code. Should this prototype be brought to life, the design must be feasible for use in real airports around the world from both economic and social perspectives. As a result, the chosen design ensures luggage can be transferred optimally from platform to platform in a simple and effective manner. In terms of the software component of this mechanism, the proposed solution simplifies the code into only the rotation of the actuator. Additionally, to maximize the efficiency of the Q-Arm code, it analyzes the position of the luggage plate, transfer box, and rejection bin before putting it all together in movement. By optimizing the movement sequence and eliminating redundant operations, the design achieves faster and more efficient luggage handling.
Challenges I ran into
During the testing stage, several issues arose. When evaluating the mechanism’s ability to move to Platform B and retract, there was an issue with the weight of the box and luggage in relation to the actuator. While the rotary actuator successfully delivered the luggage to the other side, it was unable to rotate back up due to the box’s weight. To confirm the source of the issue, the mechanism was tested using only the lever arm, which was successful. The Q-Arm code operated smoothly, aside from minor issues with accurate coordinates and positioning of the Arm. When these two components were put together, the luggage was successfully able to be picked up by the Arm, then dropped in the box and sent to Platform B.
What I learned
In summary, this design mechanism for an international airport was successful, due to its sturdy material, doing frequent testing and making various improvements along the way such as reducing the weight and size of the lever arm, which significantly enhanced the mechanisms ability to transfer luggages from platform A to platform B. This project allowed my team and I to strengthen our problem-solving skills as we navigated through various technical and design challenges, ensuring that our advancements in luggage handling technology optimized energy efficiency, cost-effectiveness, and time during luggage transport. Ultimately, with further improvements in the future, this project can make travel more efficient while integrating innovative and sustainable enhancements.
What's next for International Airport Luggage Mechanism
Future iterations of this project could introduce multiple changes to improve efficiency and effectiveness. As of now, the code must be manually run so that every time some luggage is placed in the transfer box, the actuator will need to be activated so that it can rotate the lever arm between platforms. However, an addition of a sensor placed within the box would ensure that this code will run automatically. This would minimize potential staff having to monitor the arm during busy transportation periods. Strengthening the power of the motor would also resolve the issue of the actuator’s inability to retract the mechanism back up to its initial position. When placing the luggage on Platform B, it was observed that the luggage was delivered in a forceful manner rather than being placed delicately. As for subsequent modifications, being able to alter the speed at which the actuator rotates can ensure that the luggage (which varies in weight) will be placed such that it accounts for all shapes and sizes of luggage. For each luggage, there can potentially be communication with the sensor to determine how fast the actuator should rotate. From a software perspective, the changes would be relatively minimal. For the sensor, this would include implementing driver code to communicate with the sensor and actuator, processing code to handle raw sensor data, and calibration code/activation code to modify sensor readings and trigger the rotary actuator. Additionally, during execution of the combined mechanism, manual luggage scanning was necessary during testing before activating the Q-Arm. However, during the next iteration of this project, the scanner could be placed in a spot where it aligns with the luggage plate. This would scan each luggage automatically, improving the efficiency of our mechanism and optimizing transport of all baggage.

Log in or sign up for Devpost to join the conversation.