-
-
Stirring the tea
-
Stirring the tea
-
Stirring the tea
-

Stirring the tea
-

Stirring the tea
-
Stirring the tea




Inspiration
To make Bicentennial Man (humanoid), controlling each and every part of the humanoid would be too difficult to code
Motors are an integral part of almost everything movable. Controlling motors is much complicated when it comes to making complicated moves especially like dance moves
My school teacher used to say, NO SpoonFeeding, learn by yourself.
So why don't the motors learn by themselves to move on their own?
And that's where the intelligent motors come into place.
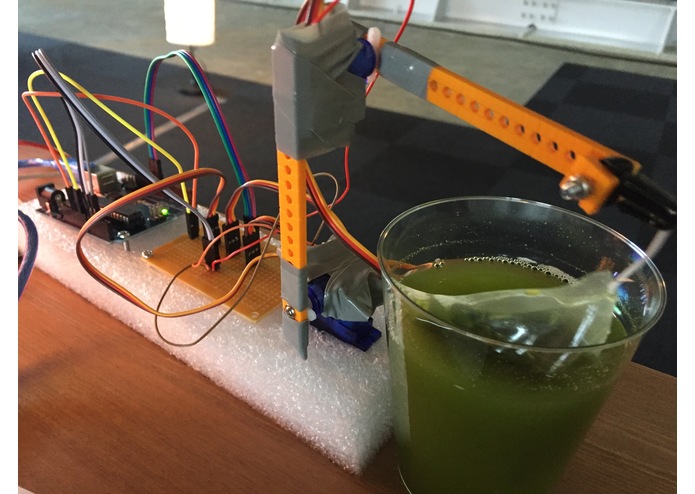
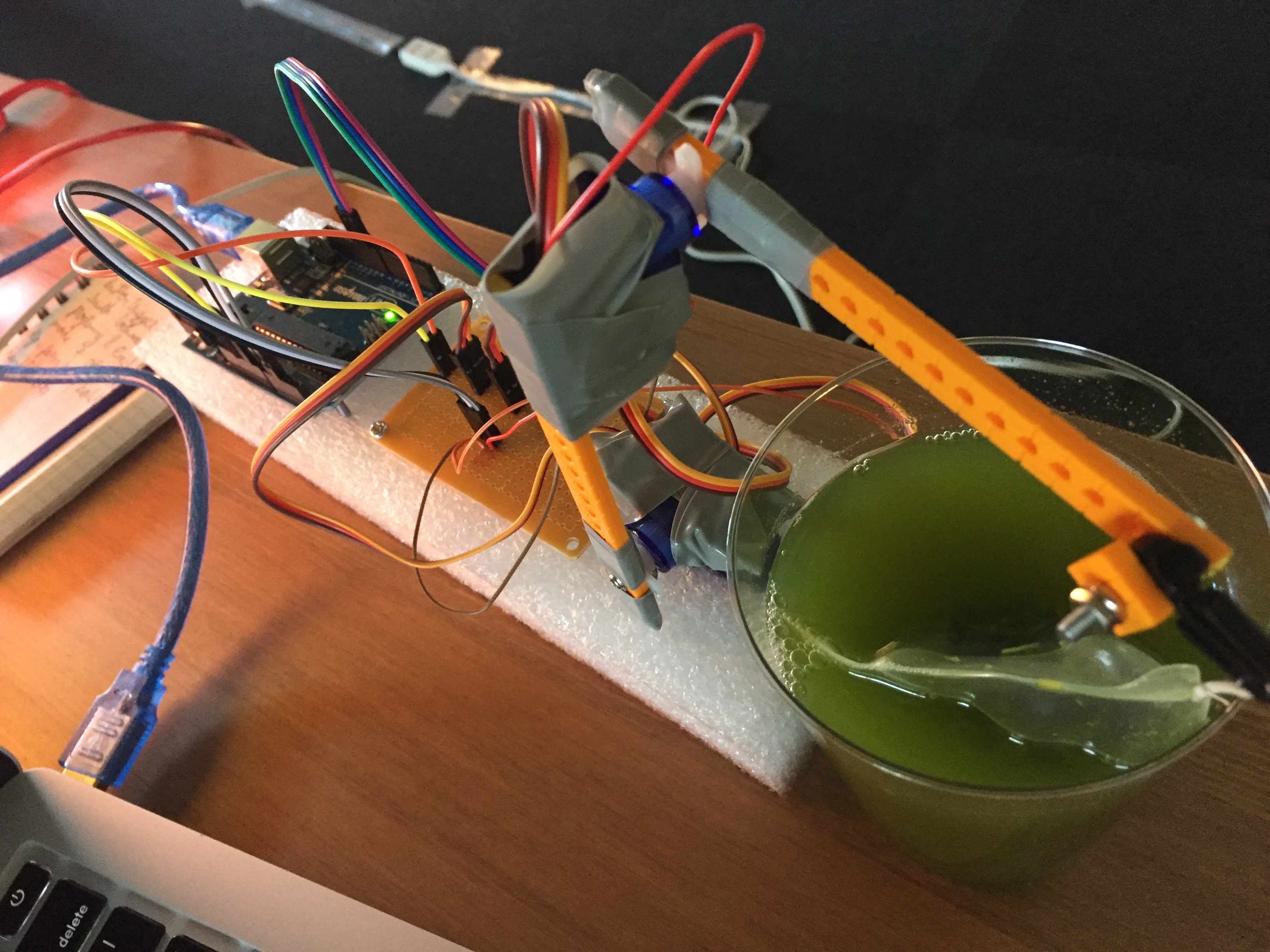
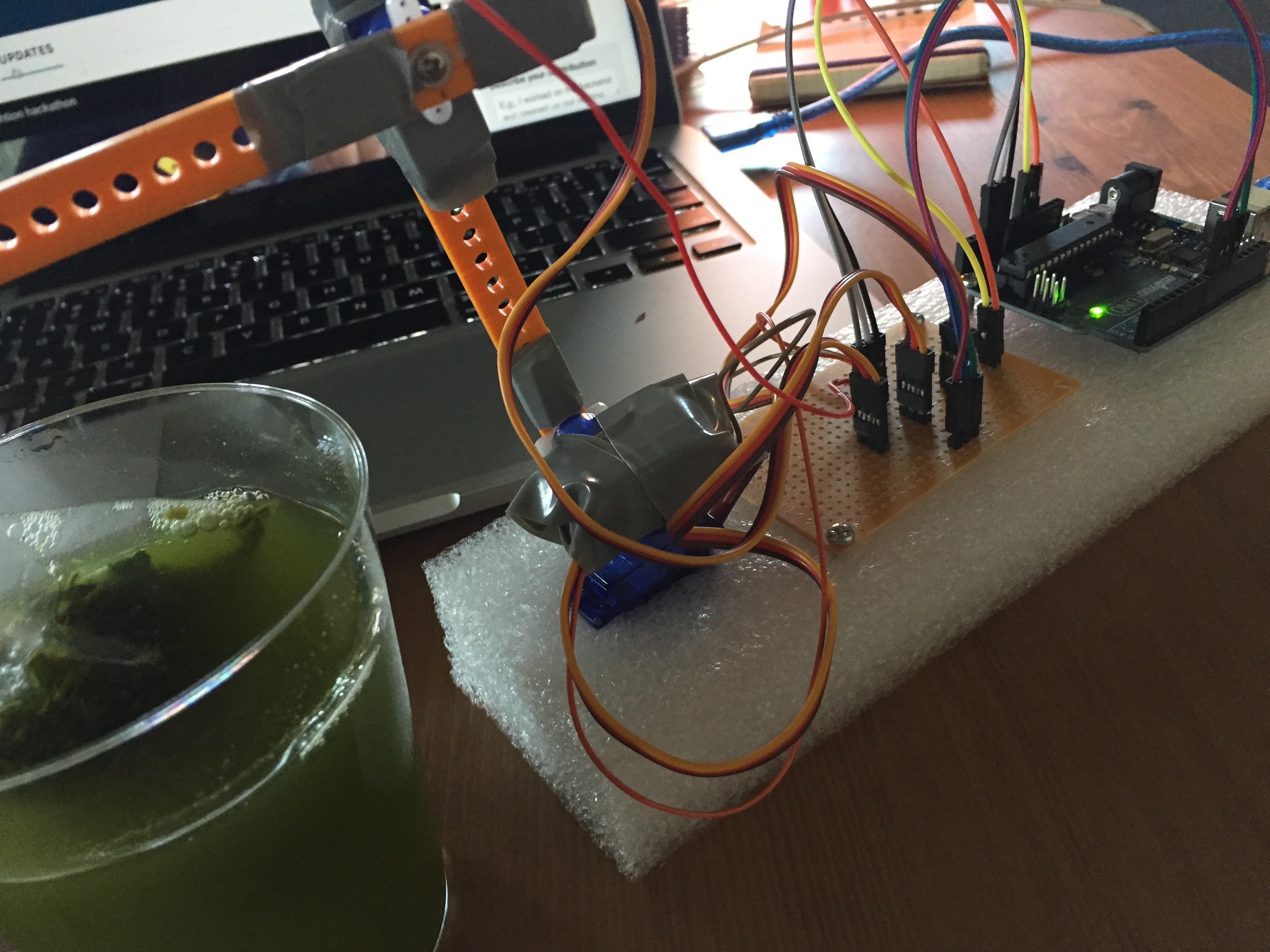
This robotic arm is made from intelligent motors.
What it does
Hold the arm and move however you want to teach some move.
The arm will remember the movements and will continue to execute it unless it is reset.
This friendly arm has lots of benefits when used for cooking.
Standard operational procedures in cooking can be automated by this arm.
1) Making cream (too much effort and patience)
2) Cutting Onions (perfection and watery eyes)
3) Continuous stirring of Curry (continuous tracking operation)
Recipe procedures like making the cream require so much patience and effort can be automated by this arm.
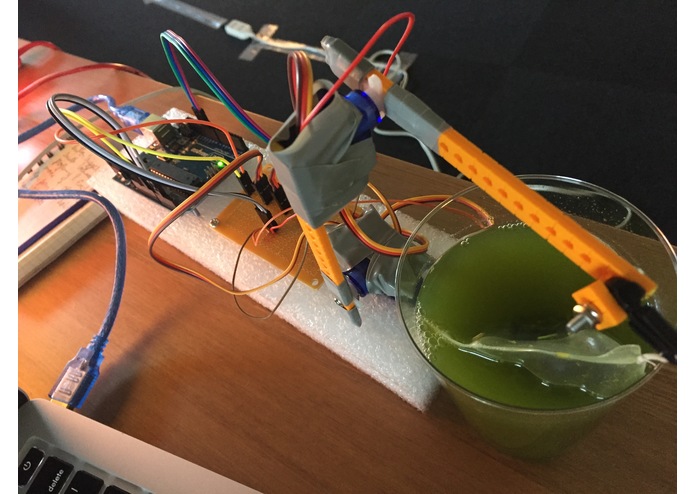
How I built it
Went to Akihabara and got a couple of servo motors.
Hacked those servo motors to export the internal feedback from the servo.
Program Arduino to intercept this feedback and process to store the movements.
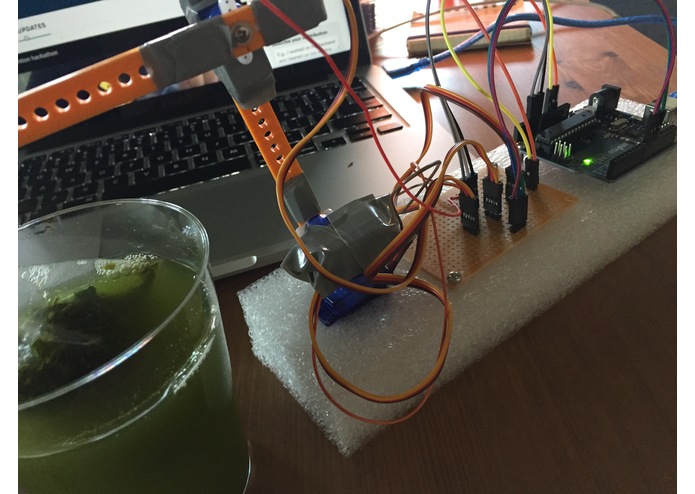
The main points of building the robotic arm using intelligent motors are
1) Reduced Complexity of Code
2) More efficient in terms of building and motor - motor co-ordination
Challenges I ran into
OutOfMemory exceptions on Arduino.
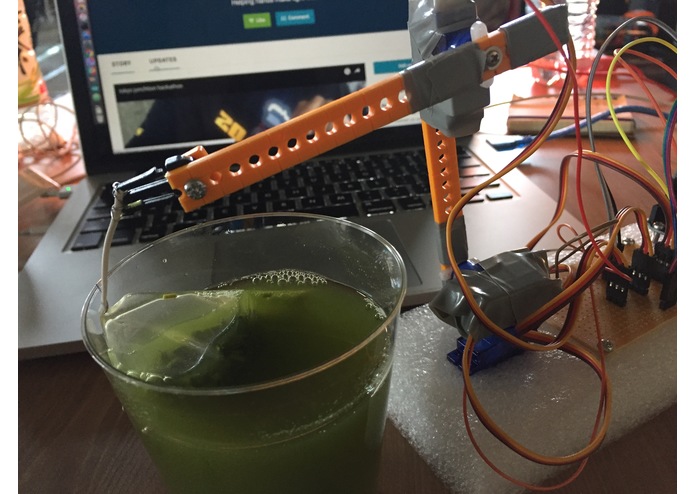
Accomplishments that I'm proud of
My arm can make the hot dipping tea for me.
What I learned
Stick to the basic idea and then expand.
What's next for intelligent-motors
1) Motor <-> Motor inter communication to trigger learning mode
2) Integration of Arduino + Servo on miniature level (embedding the chip inside the motor)
Intelligent motors can be used to build http://plen.jp/ If all the motors are replaced by these type, then you can virtually teach any type of move to the robot.
Log in or sign up for Devpost to join the conversation.