-
Circuit Simulation
-
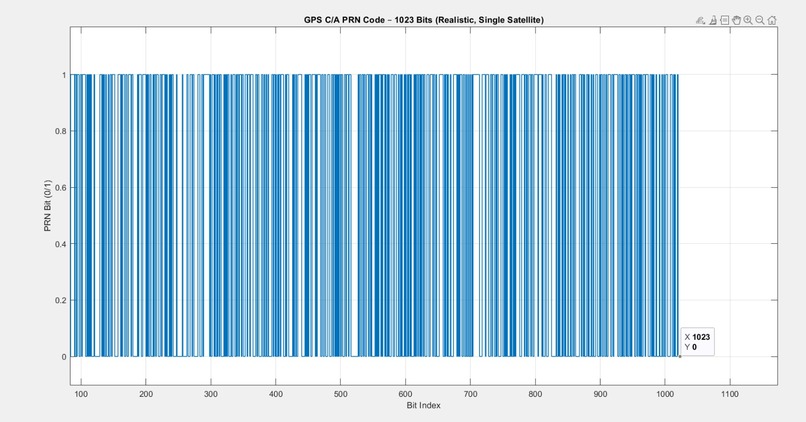
PRN CODE MATLAB output
-
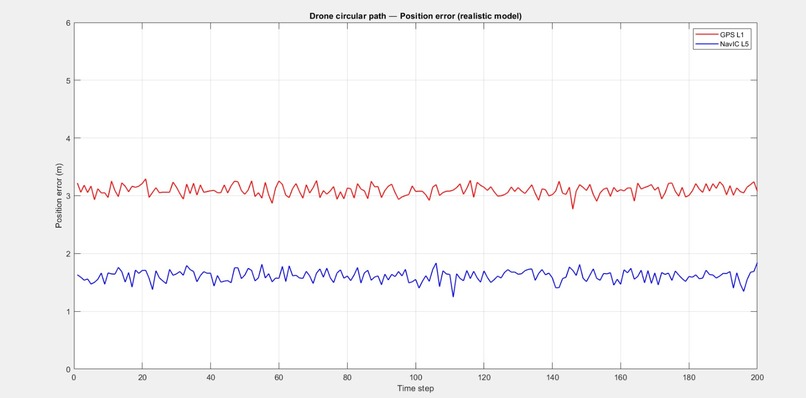
GPS AND NAVIC POSTION ERROR CODE MATLAB output
-
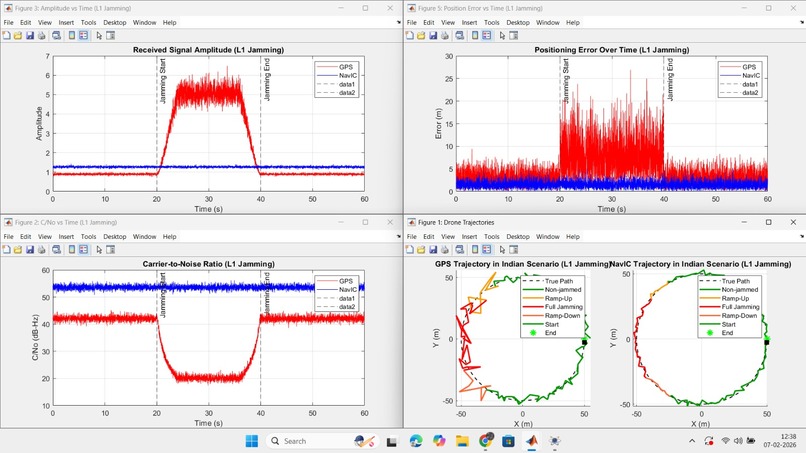
Comparative Impact of L1 Jamming on GPS and NavIC Performance in an Indian Drone Navigation Scenario
-
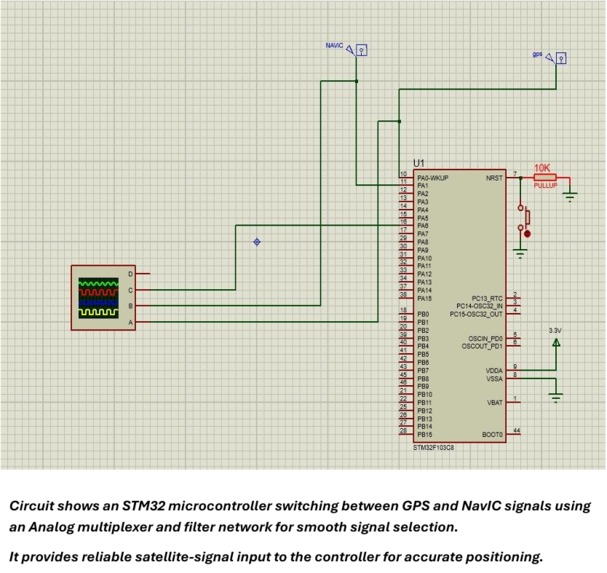
Hardware circuit desgin





Inspiration Modern drones and autonomous systems are increasingly deployed in environments where reliability is non-negotiable—medical deliveries, disaster response, and strategic operations. However, most of these systems rely heavily on GPS, which is vulnerable to jamming, spoofing, and signal degradation. Even a brief GNSS failure can result in mission failure or loss of critical assets. While India’s indigenous NavIC system exists as a strong alternative, it is rarely used as a seamless fallback in real-world platforms. This gap inspired us to build SkyMorph—a solution that does not wait for failure, but actively detects GNSS threats and adapts in real time to ensure continuous navigation.
What it does SkyMorph is a plug-and-play Intelligent GNSS Resilience Switcher that continuously monitors GNSS signal integrity. When GPS jamming or spoofing is detected, the system automatically switches to NavIC within 100 milliseconds, maintaining meter-level positioning accuracy. A key innovation of SkyMorph is its ability to dynamically modify the NMEA sentence prefix, allowing it to remain universally compatible with existing autopilot systems. This ensures uninterrupted navigation without requiring firmware changes or reconfiguration—making the solution truly drop-in ready.
How we built it SkyMorph was built on a custom STM32-based PCB, optimized for compact size, low power consumption, and real-time performance. The system interfaces with both GPS and NavIC receivers and processes GNSS data using an intelligent detection engine. To validate reliability and switching behavior, we conducted MATLAB-driven simulations, modeling GNSS degradation, spoofing, and recovery scenarios. The firmware handles real-time signal analysis, constellation switching, and NMEA stream manipulation to ensure seamless output to the flight controller or robotic system.
Challenges we ran into One of the biggest challenges was ensuring switching speed without data discontinuity, as even small delays can disrupt autopilot stability. Another challenge was achieving universal compatibility, since most autopilots are tightly coupled to specific NMEA formats. Additionally, balancing detection accuracy with low power consumption on an embedded platform required careful optimization of both firmware logic and hardware design. Accomplishments that we're proud of Achieved sub-100 ms GNSS switching without navigation interruption Successfully implemented dynamic NMEA prefix modification for plug-and-play compatibility Designed a compact, lightweight, STM32-based PCB suitable for drones Validated system performance using MATLAB simulations Leveraged NavIC to create an indigenous and scalable solution
What we learned Through this project, we gained deep insights into GNSS vulnerabilities, embedded system design, and real-time signal processing. We also learned the importance of designing systems that are not only technically robust but also deployment-friendly, requiring minimal changes to existing infrastructure. Most importantly, we learned how indigenous technologies like NavIC can be effectively integrated to solve real-world problems when paired with thoughtful system design.
What's next for Intelligent GNSS Resilience Switcher Future plans include expanding support to additional GNSS constellations, improving spoofing classification using adaptive algorithms, and conducting extended real-world flight tests. We also aim to miniaturize the hardware further and explore large-scale deployment for critical civilian and defence applications.
SkyMorph is a step toward resilient, reliable, and self-reliant navigation systems, aligned with the vision of Atmanirbhar Bharat.
Built With
- autodesk-fusion-360
- blender
- cad
- matlab
- proteus





Log in or sign up for Devpost to join the conversation.